

8.3. Центр тяжести твёрдого тела
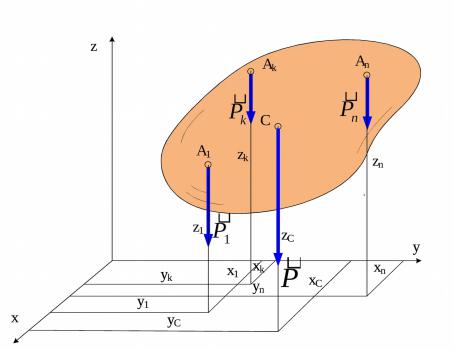
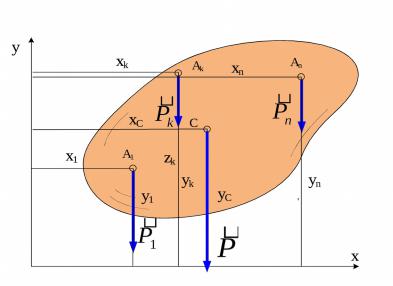
Центром тяжести твердого тела называется неизменно связанная с этим телом точка, через которую проходит линия действия равнодействующей сил тяжести частиц данного тела при любом поло- жении тела в пространстве.
147
Силы тяжести, действующие на каждую частицу твёрдого тела образуют систему сил, параллельных вертикальной оси z. Поэтому координаты центра тяжести твёрдого тела определяются по формулам, по которым определяется центр параллельных сил.
|
n |
|
n |
|
n |
|
x |
pk xk |
; y |
pk yk |
; z |
pk zk |
. |
k 1 |
k 1 |
k 1 |
||||
|
|
|
||||
C |
P |
C |
P |
C |
P |
|
|
|
|
|
148
Если тело является однородным, то вес pk любой его частицы пропорционален объёму vk этой части тела:
pk vk , где – удельный вес тела.
Подставляя pk в формулы координат центра тяжести тела, получим координаты центра тяжести объёма.
|
n |
|
n |
|
|
|
n |
|
x |
vk xk |
; y |
vk yk |
; z |
|
|
vk zk |
. |
k 1 |
k 1 |
C |
k 1 |
|||||
|
|
|
||||||
C |
V |
C |
V |
|
|
V |
|
|
|
|
|
|
|
|
149
Если твёрдое тело выполнено в форме пластины, то координаты его цента тяжести определяются по
формулам: |
n |
|
n |
|
|
|
|
||
x |
sk xk |
; y |
sk yk |
, |
k 1 |
k 1 |
|||
|
|
|||
C |
S |
C |
S |
|
|
|
|
где S – площадь пластины; sk – площади частей, из
которых состоит пластина. |
150 |
Координаты центра тяжести линии определяются по следующим формулам:
|
n |
|
n |
|
n |
|
x |
lk xk |
; y |
lk yk |
; z |
lk zk |
, |
k 1 |
k 1 |
k 1 |
||||
|
|
|
||||
C |
L |
C |
L |
C |
L |
|
|
|
|
|
где L – длина всей линии; lk –длина её частей.
151
8.4. Способы определения координат |
|
|||||||
|
центров тяжести тел |
|
||||||
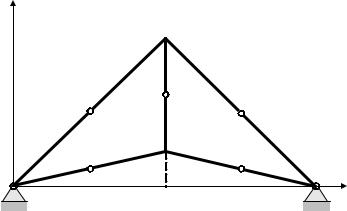
1. Симметрия. Если однородное тело имеет |
||||||||
плоскость, ось или центр симметрии, то его центр |
||||||||
тяжести лежит соответственно или в плоскости |
||||||||
симметрии, |
или на оси |
|
симметрии, или в |
центре |
||||
симметрии. |
y |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|||
|
C5 |
C4 |
|
|
|
C3 |
|
|
|
|
|
5 |
|
|
|
||
|
4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
E |
|
|
|
|
3 |
|
|
|
1 |
|
|
2 |
C2 |
|
||
|
|
|
|
|
|
|||
|
C1 |
|
|
|
|
B |
|
|
|
A |
|
|
|
|
|
|
|
|
F |
|
|
|
x |
|
||
|
|
|
|
|
|
|||
n
lk yk
y |
k 1 |
|
|
|
|
|
|
C |
l |
|
|
|
|
152 |
|
|
|
|
|
2. Разбиение. Если тело можно разбить на конечное |
||||||
число таких частей, для каждой из которых положение |
||||||
центра тяжести известно, то координаты центра |
||||||
тяжести всего тела можно вычислить по формулам, |
||||||
приведенным выше. При этом число слагаемых в |
||||||
каждом из числителей будет равно числу частей, на |
||||||
которые разбитоy |
тело. |
|
20 |
|
||
|
20 |
|
|
|
|
|
40 |
|
|
20 |
|
50 |
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
3 |
|
|
|
|
|
|
||
|
|
|
100 |
|
x |
|
x s x s |
|
x s |
yc |
y1s1 y2s2 y3s3 |
|
|
x 1 1 |
2 |
2 |
3 3 |
S |
|
|
c |
S |
|
|
|
153 |
|
|
|
|
|
|||
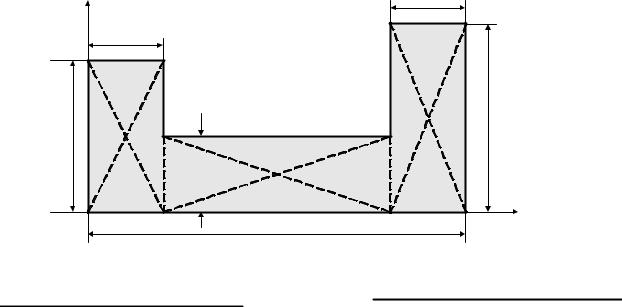
3. Дополнение. Этот способ является частным случаем способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны.
A
|
E |
C |
O |
|
x |
|
xc |
|
|
|
B
x Fk xk F1x1 F2 x2 |
||
c |
F |
F1 F2 |
|
||
154
4. Интегрирование. Если тело нельзя разбить на несколько конечных частей, положения центров тяжести которых известны, то тело разбивают сначала на произвольные малые объемы vk , для которых формулы из для определения центра тяжести тела принимают вид:
|
n |
|
n |
|
|
|
n |
|
x |
xk vk |
; y |
yk vk |
; z |
|
|
zk vk |
. |
k 1 |
k 1 |
C |
k 1 |
|||||
|
|
|
||||||
C |
V |
C |
V |
|
|
V |
|
|
|
|
|
|
|
|
Затем переходят к пределу, устремляя к нулю. Тогда стоящие в числителях суммы обращаются в интегралы, распространенные на весь объем тела:
155
x |
1 |
|
x dV ; y |
1 |
|
y dV ; z |
|
|
1 |
|
z dV. |
|
|
C |
|
||||||||
C |
V (V ) |
C |
V (V ) |
|
V (V ) |
|
|||||
|
|
|
|
|
|||||||
Аналогично для координат центров тяжести плоского тела и весомой линии получим:
|
|
x |
1 |
|
x dS; y |
1 |
|
y dS. |
|
|||||||||
|
|
S (S ) |
S (S ) |
|
||||||||||||||
|
|
C |
|
|
|
C |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
x |
1 |
|
x dL; |
y |
1 |
|
y dL; z |
|
|
1 |
|
z dL. |
||||||
L (L) |
L (L) |
C |
L (L) |
|||||||||||||||
C |
|
|
|
C |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
156