

В результате получим:
ån Fkx =0;Прån
k=1 |
k=1 |
ån Fky =0;Прån
k=1 |
k=1 |
ån Fkz =0;Прån
k=1 |
k=1 |
ér |
r |
ù |
m |
F0; |
= |
x ê O ( |
k )ú |
|
ë |
r |
û |
ér |
ù |
|
m |
F0; |
= |
y ê O ( |
k )ú |
|
ë |
r |
û |
ér |
ù |
|
m |
F0. |
= |
z ê O ( |
k )ú |
|
ë |
|
û |
104
Используя связь между моментом силы относительно точки и моментом силы относительно оси, проходящей через эту точку, получим
ån
k=1
ån
k=1
ån
k=1
Прx
Прy
Прz
ér ( êm ë O
ér ( êm ë O
ér ( êm ë O
Fr )ùú=ån
k û k=1
Fr )ùú=ån
k û k=1
Fr )ùú=ån
k û k=1
( r ) =
mx Fk 0;
( r ) =
my Fk 0;
( r ) =
mz Fk 0.
105
Таким образом, если твёрдое тело находится в равновесии под действием произвольной системы сил, то для неё можно составить шесть уравнений
равновесия: |
|
r |
n |
n |
|
å Fkx =0; |
å mx (Fk ) =0; |
|
k=1 |
k=1 |
r |
n |
n |
|
å Fky =0; |
å my (Fk ) =0; |
|
k=1 |
k=1 |
r |
n |
n |
|
å Fkz =0; |
å mz (Fk ) =0. |
|
k=1 |
k=1 |
|
106
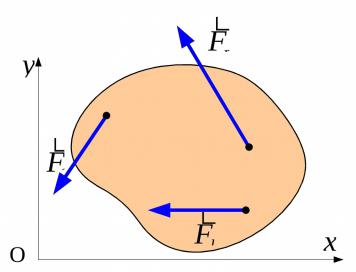
5.5. Уравнения равновесия плоской произвольной системы сил
Система сил, линии действия которых расположены произвольно в одной плоскости, называется плоской произвольной.
107
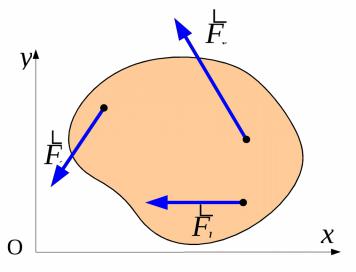
Плоская произвольная система сил является частным случаем пространственной произвольной системы сил.
Запишем уравнения равновесия пространственной произвольной системы сил и выберем из них уравнения, соответствующие плоской произвольной системе
сил. |
n |
n |
r |
|
å Fkx =0; |
å mx (Fk ) =0; |
|
|
k=1 |
k=1 |
r |
|
n |
n |
|
|
å Fky =0; |
å my (Fk ) =0; |
|
|
k=1 |
k=1 |
r |
|
n |
n |
|
|
å Fkz =0; |
å mz (Fk ) =0. |
|
|
k=1 |
k=1 |
108 |
Таким образом, если твёрдое тело находится в равновесии под действием плоской произвольной системы сил, то для неё можно составить три уравнения равновесия:
n |
kx |
|
n |
|
n |
O ( |
r |
|
) å |
=0; |
å ky |
=0; |
å |
k ) |
=0. |
||
1 |
F |
F |
|
m F |
||||
k=1 |
|
|
k=1 |
|
k=1 |
|
|
|
Кроме этих уравнений для плоской произвольной системы сил можно получить следующие две формы
уравнений равновесия: |
|
r |
|
|
n |
r |
n |
n |
|
2) å mA (Fk ) =0; |
å mB (Fk ) =0; |
å Fkx =0. |
||
k=1 |
|
k=1 |
|
k=1 |
Здесь А, В – два произвольных центра; Ox – ось, не
перпендикулярная прямой AB.
109
Из представленных уравнений три уравнения для плоской произвольной системы сил являются
тождествами: |
n |
n |
r |
|
å Fkx =0; |
å mx (Fk ) º 0; |
|
|
k=1 |
k=1 |
r |
|
n |
n |
|
|
å Fky =0; |
å my (Fk ) º 0; |
|
|
k=1 |
k=1 |
r |
|
n |
n |
|
|
å Fkz º 0; |
å mz (Fk ) =0. |
|
|
k=1 |
k=1 |
|
Так как на плоскости момент силы относительно
оси z совпадает по величине и по знаку с моментом силы относительно начала координат, то последнее
уравнение запишем в таком виде: |
|
|
n |
r |
|
å mO (Fk ) =0. |
110 |
|
k=1 |
|
|
) |
n |
|
A ( |
r |
|
n |
|
B ( |
r |
|
n |
C ( |
r |
|
å |
m |
k ) |
=0; |
å |
m |
k ) |
=0; |
å |
k ) |
=0. |
||||
3 |
k=1 |
|
F |
k=1 |
|
F |
k=1 |
m F |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Здесь А, В, С – три произвольных центра, не лежащие на одной прямой.
111
6. Связи и силы реакций связей
Свободное тело – твёрдое, не закреплённое тело, которому можно сообщить любые перемещения в пространстве.
Несвободное тело – твёрдое тело, перемещения которого в пространстве ограничены другими телами, скреплёнными или соприкасающимися с ним.
Связи – тела, ограничивающие перемещения данного тела в пространстве.
Сила давления – сила, с которой тело действует на связь.
112
Сила реакции связи – сила, с которой связь дей- ствует на рассматриваемое тело.
Направление силы реакции связи. Сила реакции связи направлена противоположно тому направлению, в котором связь препятствует перемещению данного тела.
Активные силы – это силы, которые могут сообщить движение свободному телу.
Гладкая поверхность – это поверхность, трением со стороны которой можно пренебречь. Сила реакции гладкой поверхности направлена по общей нормали в точке контакта поверхностей соприкасающихся тел и
приложена в этой точке, рис. 44.
113
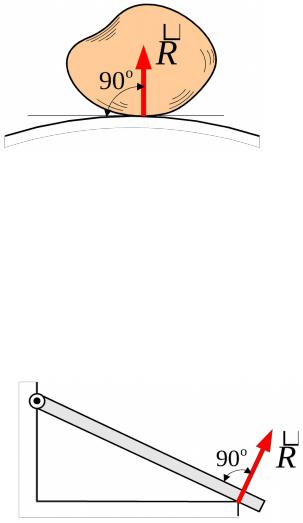
Рис. 44
Если гладкое тело опирается на ребро, то сила реакции направлена по нормали к поверхности тела, рис. 45.
Рис. 45
114