

Конспект лекций по КМР
.pdfВ предварительных расчетах можно принять:
|
1 |
... |
1 |
a |
r; |
||
|
6 |
|
15 |
2 |
... |
1 |
|
b |
|
a. |
|
|
3 |
|
3 |
При b=a жесткость пружины будет минимальной:
c |
mgr |
. |
||
a |
2 |
|||
|
|
|||
|
|
|
||
Задаваясь параметрами a и b, можно вычислить жесткость пружины и все ее параметры.
Максимальная деформация пружины:
|
max |
a b. |
|
|
Максимальная сила упругой деформации пружины:
F |
|
mgr |
a b . |
|
|
max |
a b |
|
|
|
|
|
||
|
|
|
|
|
Потенциальная энергия пружины:
|
2 |
|
mgr |
|
Ï |
c |
|
. |
|
|
|
|
|
2 |
|
2 |
|
2ab |
|
Полная потенциальная энергия пружины:
Ï |
|
mgr |
a b |
|
2. |
|
ÏË |
2ab |
|
|
|
|
|
|
|
||
|
|
|
|
|
Рассмотрим основные схемы реальных уравновешивающих механизмов с синусно-косинусной нагрузочной характеристикой.
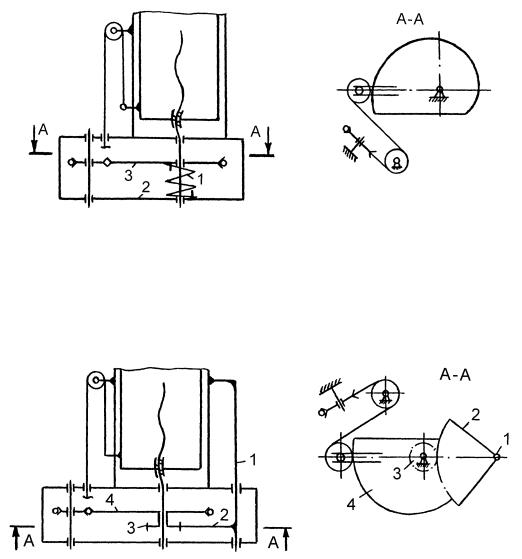
На рис. 12.14 изображены кулисные уравновешивающие механизмы.
Рис.12.14
347
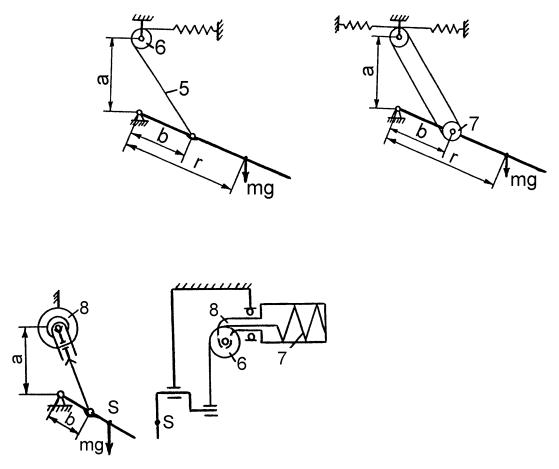
Они состоят из стойки 1, пружины 2, кривошипа 3, жестко соединенного с уравновешиваемым звеном 4, и кулисы 5. Эти механизмы обеспечивают теоретически точное воспроизведение нагрузочной характеристики, так как при повороте звена на любой уголсохраняется постоянство параметров a и b уравновешивающего механизма. Однако для работы кулисных механизмов требуется большое свободное пространство. Это обусловлено тем, что при повороте кулис вместе с ними должны поворачиваться и пружины, которые определяют основные габаритные размеры системы.
Указанный недостаток может быть устранен применением гибких элементов в сочетании с опорными роликами (рис. 12.15).Такими уравновешивающими механизмами являются механизмы, которые в отличие от расчетной схемы содержат дополнительно гибкий элемент 5 и опорный ролик 6. Однако при работе таких механизмов точка схода гибкого элемента с ролика перемещается, вызывая изменение угла обхвата ролика гибким элементом, что приводит к неточности воспроизведения нагрузочной характеристики (неточности уравновешивания).
Рис. 12.15
Рис. 12.17
Рис. 12.16
Для устранения этого недостатка можно использовать гибкий элемент с двумя ветвями и опорный ролик 7, расположенный на оси кривошипа (рис. 12.16), или установить опорный ролик и пружину на подвижную опору 8 (рис.
12.17).
В уравновешивающих механизмах также могут быть использованы пружины кру-
348
чения и торсионы. На рис. 12.18 изображен уравновешивающий механизм, состоящий из гибкого элемента 1, закрепленного на блоке 2, и пружины кручения 3, жестко соединенной с блоком 2 и стойкой 4. При изменении положения уравновешиваемого звена 5 происходит закручивание пружины. При этом крутящий момент пружины равен, Н.мм:
|
|
|
|
|
Ò |
mgr a b |
|
R, |
|
a |
b |
|
||
|
|
|
||
где R – радиус блока, мм.
Угол закручивания пружины, рад:
|
a b |
. |
|
R |
|||
|
|
В уравновешивающем механизме с торсионом 5 (рис. 12.19) между блоком 2 и торсионом 5 установлена повышающая зубчатая передача, целесообразность применения которой обусловлена ограничениями на угол закручивания торсиона.
Рис. 12.18 |
Рис .12.19 |
Крутящий момент торсиона, Н мм:
|
|
|
|
|
|
|
Ò |
|
|
mgr a b |
|
R u. |
|
T |
a |
b |
|
|||
|
|
|
|
|||
|
|
|
|
|
||
Угол закручивания торсиона, рад:
Ò a b ,
R u
где u – передаточное отношение зубчатой передачи.
349
12.8. Системы уравновешивания силовых статических нагрузок
Силовые статические нагрузки возникают только в поступательных степенях подвижности исполнительного устройства робота.
Они постоянны и не зависят от перемещений в других степенях подвижности.
Для уравновешивания силовых статических нагрузок может быть использован пружинный механизм как с постоянной, так и с синусно-косинусной нагрузочной характеристиками.
При использовании механизмов уравновешивания с постоянной нагрузочной характеристикой необходимо учитывать, что их массогабаритные характеристики определяются в основном параметрами блок-кулачка и пружины.
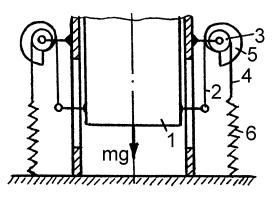
На рис. 12.20 изображена система уравновешивания вертикального перемещения звена 1 массой m исполнительного устройства робота. Она состоит из двух одинаковых уравновешивающих механизмов с постоянной нагрузочной характеристикой.
Каждый такой механизм включает в себя трос 2, одним концом Рис. 12.20 закрепленный на перемещающемся звене 1, а вторым – на кулачке пе-
ременного радиуса 5, трос 4, закрепленный одним концом на блоке 3 постоянного радиуса, а вторым концом через пружину 6 – на корпусе исполнительного устройства робота.
При опускании звена 1 трос 2 поворачивает блок-кулачок. При этом трос 4 растягивает пружину 6, что приводит к увеличению ее силы F упругой деформации, которая и создает уравновешивающий момент, равный моменту от массы m подвижного звена 1.
Для сокращения габаритов уравновешивающего механизма целесообразно пружину размещать параллельно оси поступательной степени подвижности, а блок-кулачок – перпендикулярно к оси.
На рис. 12.21 изображена схема устройства поступательной степени подвижности исполнительного устройства робота. Она включает в себя: механизм вертикального перемещения уравновешиваемого звена 9, перемещающегося в направляющих 1; пружинную систему уравновешивания с постоянной нагрузочной характеристикой, имеющую блок-кулачок 6, который установлен на опо-
350
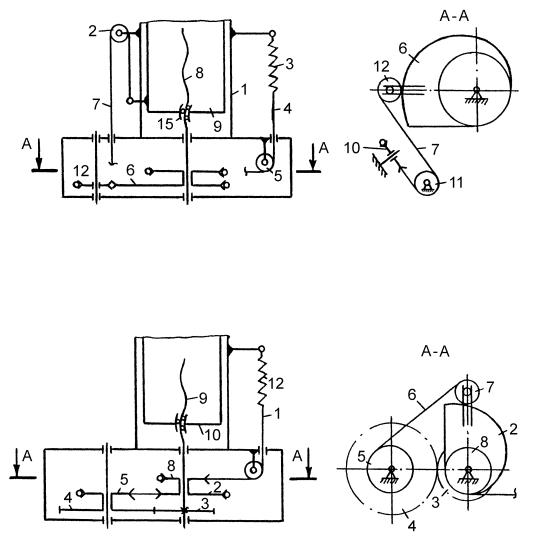
рах качения соосно приводному элементу (винту) 8, связан с одной стороны с помощью гибкого элемента 4 и ролика 5 с пружиной 3, а с другой стороны с помощью гибкого элемента 7 и роликов 2, 10, 11 и 12 с гайкой 15.
Рис. 12.21
Вращение винта 8 вызывает поступательное перемещение гайки 15 и уравновешиваемого звена 9, что приводит к повороту блоккулачка 6 и изменению деформации пружины 3.
Рис. 12.22
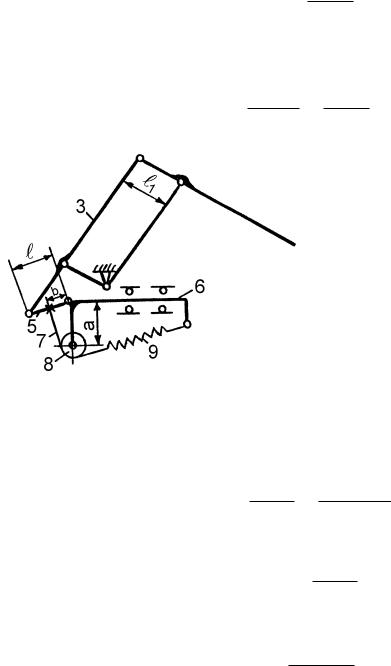
В отличие от предыдущей схемы механизма на рис. 12.22 изображена схема уравновешивающего механизма, у которого гибкий элемент 1, связанный с пружиной 12, закреплен на шкиве 8 постоянного радиуса, а гибкий элемент 6 одним концом закреплен на шкиве 5, также постоянного радиуса, а другим – через промежуточный шкив 7 – на кулачке 2. Ведущее звено (винт) 9 через зубчатую передачу, состоящую из зубчатых колес 3 и 4, связано со шкивом 5.
Вращение винта 9 вызывает перемещение уравновешиваемого звена 10 и одновременно поворот кулачка 2 и связанного с ним зубчатого колеса 3, которое, в свою очередь, поворачивает зубчатое колесо 4 со шкивом 5. В результате деформация пружины 12 изменяется, что приводит к изменению ее силы и уравновешиванию звена 10.
351
К улучшению компоновки уравновешивающего механизма подъема звена относительно небольшой массы может привести замена пружины растяжения (сжатия) на пружину 1 кручения, устанавливаемую между корпусом 2 и кулачком 3 (рис. 12.23).
Рис. 12.23
В уравновешивающих механизмах подъема звена с относительно небольшим его перемещением (рис. 12.24) возможна замена пружины растяжения (сжатия) на торсион 1, на котором установлено зубчатое колесо 2, входящее в зацепление с зубчатым колесом 3, жестко соединенным с кулачком 4.
Рис. 12.24
Рассмотрим механизм подъема звена 2 массой m, выполненный на основе шарнирного параллелограмма (рис. 12.25).
Используя принцип возможных перемещений, запишем: m g dh T d ,
где T – вращающий момент на валу 1, Н.мм; h – перемещение звена 2, мм:
h L sin ,
где L – длина рычага 3 параллелограмма, мм; – угол наклона звена 3 параллелограмма к горизонтали, град; dh – элементарное линейное перемещение звена 2, мм:
352
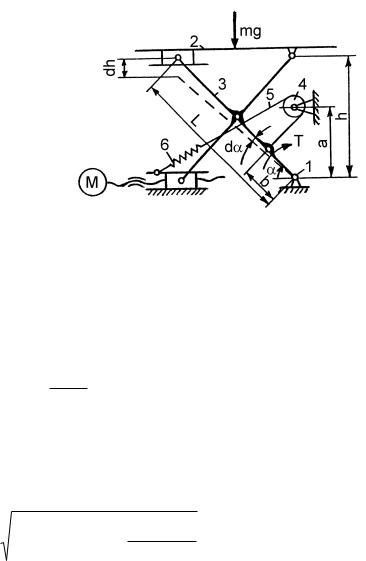
dh L cos d ;
d – элементарное угловое перемещение звена 3 параллелограмма, град.
После подстановки получим:
Ò mgL cos . |
|
|
||
Таким образом, момент на |
|
|||
валу 1 звена 3 параллелограмма |
|
|||
изменяется по косинусоидально- |
|
|||
му закону. Поэтому для уравно- |
|
|||
вешивания звена 2 можно приме- |
|
|||
нить пружинную систему с си- |
|
|||
нусно-косинусной |
нагрузочной |
|
||
характеристикой, |
состоящую из |
|
||
блока 4 и троса 5, закрепленного |
Рис. 12.25 |
|||
одним концом на звене 3, а дру- |
||||
|
||||
гим – через пружину 6 на стойке. |
|
|||
В этом случае параметры пружины можно связать с парамет- |
||||
рами механизма подъема. |
|
|
||
Жесткость пружины, Н/мм: |
|
|
||
|
c |
mgL |
, |
|
|
a b |
|||
|
|
|
||
где a – расстояние между валом 1 и осью блока 4, мм; b – расстояние между валом 1 и точкой крепления троса 5 к звену 3 параллелограмма, мм.
Максимальная (минимальная) деформация пружины, мм:
где мм.
hmin max
max min a 2 b2 2ab hmin max ,
L
– минимальное (максимальное) перемещение звена 2,
Если параллелограмм состоит из n секций, то в приведенной формуле нужно заменить L на nL.
12.9. Системы уравновешивания моментных статических нагрузок
Моментные статические нагрузки возникают только во вращательных степенях подвижности исполнительного устройства робота.
353
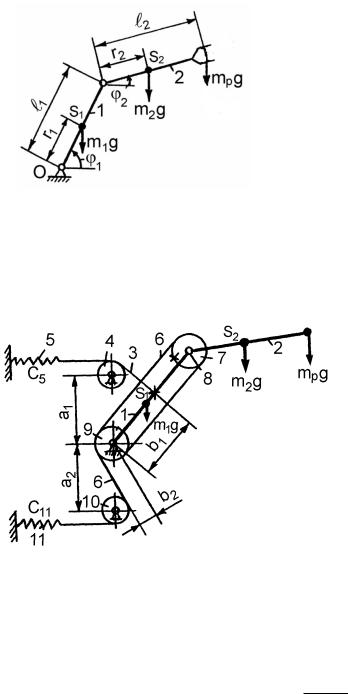
Рассмотрим исполнительное устройство робота, работающее в ангулярной (угловой) системе координат (рис. 12.26). Составим
уравнение моментов относительно точки O: |
|
|
|
|
|
|
|
||||||||||||
M m g r cos |
m g |
1 |
cos |
r |
cos |
2 |
|
|
|
|
|
||||||||
1 |
|
1 |
1 |
|
2 |
|
|
|
1 |
2 |
|
|
|
|
|
|
|
||
m g |
1 |
cos |
|
2 |
cos |
2 |
|
m g r |
m m |
g |
1 |
cos |
|
||||||
|
1 |
|
|
|
|
|
1 |
1 |
2 |
|
|
|
|
1 |
|
||||
m2 gr2 |
m g 2 cos 2 |
Т1 max cos 1 Т2 max cos 2 |
, |
|
|||||||||||||||
где
Ò1max
– максимальный момент на
выходном валу привода звена внешних нагрузок, Н.мм;
1
Ò
от всех
2 max |
– |
максимальный момент на выходном валу привода звена 2 от внешних нагрузок, приложенных к этому звену, Н.мм; r1 – расстояние от первой степени подвижности до центра S1 масс
Рис. 12.26 первого звена, мм; r2 – расстояние от второй степени подвижности до цен-
тра S2 масс второго звена, мм; m1, m2 и mр – массы соответственно первого и второго звеньев и рабочего органа, кг; 1 и 2 – углы поворота первого и второго звеньев относительно горизонтали соответственно, град.
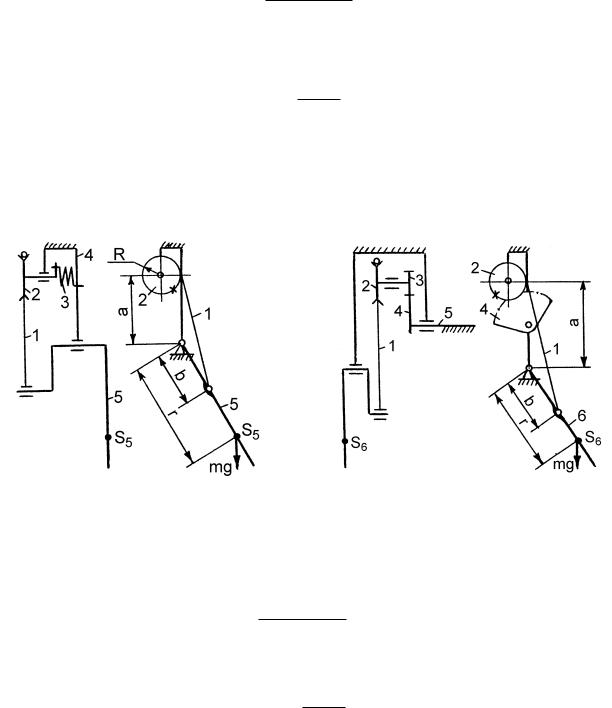
Так как моменты на валах изменяются по косинусоидальному закону, то для уравновешивания моментных статических нагрузок можно применить пружинную систему уравновешивания с си- нусно-косинусной нагрузочной характеристикой (рис. 12.27), состоящую из двух уравновешивающих механизмов.
Первый уравновешивающий механизм предназначен для компенсации момента Т1 и состоит из троса 3, прикрепленного к звену 1, блока 4 и пружины 5.
Жесткость пружины 5 равна:
c5 Ò1max .
a1b1
354
Второй уравновешивающий механизм предназначен для компенсации момента Т2 и состоит из троса 6, закрепленного на блоке 7, который жестко соединен с валом 8 звена 2, блоков 9 и 10 и пружины
11.
Жесткость пружины 11 равна:
|
|
Ò |
|
c |
2max |
||
|
|
||
11 |
|
a b |
|
|
|
||
|
|
2 |
2 |
.
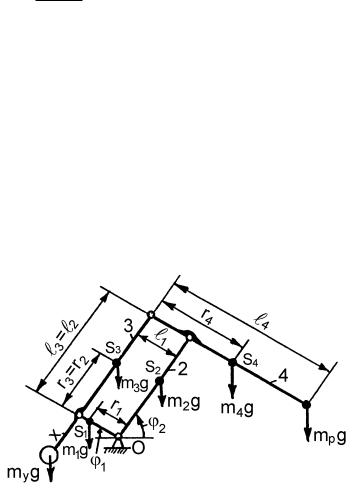
Рассмотрим исполнительное устройство робота, выполненное в виде пантографа (рис. 12.28).
Составим уравнение моментов относительно точки О:
M m g r cos |
m g r cos |
2 |
m g r cos |
2 |
|
cos |
||||||||||||||
1 |
1 |
1 |
|
|
2 |
2 |
|
|
|
3 |
3 |
|
|
|
1 |
4 |
1 |
|
||
m4 g 2 |
cos 2 r4 1 cos 1 m g 2 |
cos 2 |
1 |
|
||||||||||||||||
m g r m g |
1 |
m g r |
1 |
m g |
4 |
|
1 |
cos |
|
|
||||||||||
1 |
1 |
3 |
|
|
4 |
4 |
|
|
|
|
|
|
|
1 |
|
|||||
m2 g r2 |
m3 g r3 |
m4 g 2 |
m g 2 |
cos 2 |
|
|
|
|
|
|
|
|||||||||
Т1 max cos 1 |
Т2 max |
cos 2 , |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
cos 1
Моменты изменяются по косинусоидальному закону. Поэтому для уравновешивания моментных статических нагрузок можно применить пружинную систему уравновешивания с синусно-косинусной нагрузочной характеристикой аналогичную рассмотренной выше.
Данный механизм мо-
жет быть уравновешен одной постоянной массой mУ, приложенной на продолжении звена 3 (рис. 12.28). Для нахождения этой массы и точки ее приложения рассмотрим равновесие всей системы относительно точки О:
Т1 max cos 1 Т2 max cos 2 mУ g x cos 2 1 cos 1 0 ,
откуда получим:
Т1max
mУ
g
1
;
Ò |
2max |
m |
g x |
|
Ó |
|
Тогда значение уравновешивающей
.
массы будет равно, кг:
355
m |
|
Т |
1max . |
||
|
|||||
У |
|
g |
|
|
|
|
|
1 |
|||
|
|
|
|
1 |
|
Расстояние x от шарнира на звене 3 до точки приложения массы mУ, мм:
x |
Ò |
2max |
|
Ò |
|
|
|
||||
m |
|
g |
Ò |
||
|
|
|
|||
|
Ó |
|
|
|
|
2max |
|
|
. |
|
1 |
||
|
|
|
|
1max |
|
|
|
Рис. 12.29
Вместо грузового уравновешивания может быть использована пружинная система уравновешивания (рис. 12.29).
Она состоит из звена 5, шарнирно соединенного со звеном 3 и подвижной рамкой 6, гибкого элемента 7, закрепленного на звене 5 и огибающего опорный ролик 8, и пружины 9.
Такая система обеспечивает
постоянство силы |
FÓ mÓ g |
(рис. 12.28) во всем диапазоне перемещений звеньев исполнительного устройства робота.
Жесткость пружины равна:
c |
F |
|
|
|
m |
|
g |
|
, |
|
Ó |
|
Ó |
|
|
||||
|
|
|
|
|
|
|
|||
|
a b |
|
|
a b |
|
|
|||
но
|
g |
Ò |
|
m |
1max |
. |
|
|
|||
Ó |
|
|
|
|
|
|
|
|
|
1 |
|
Тогда |
|
|
|
|
|
|
|
|
c |
Ò |
1max |
|
. |
||
|
|
|
|
||||
|
|
|
|
a |
b |
||
|
|
1 |
|
||||
|
|
|
|
|
|
||
Для уменьшения жесткости пружины величину |
|||||||
выбирать из условия |
1. |
|
|
|
|
|
|
желательно
12.10. Системы уравновешивания комбинированных статических нагрузок
Комбинированные статические нагрузки возникают при одновременном поступательном и вращательном движениях звена исполнительного устройства робота.
356