

Конспект лекций по КМР
.pdfмости от функционирования робота и (или) контролируемых параметров рабочей среды.
Не следует смешивать понятия «адаптивный робот» и «очувствленный робот». Последний, обладая датчиками внешней информации, может не иметь средств автоматического изменения управляющей программы в процессе функционирования.
ИНТЕЛЛЕКТНЫЙ РОБОТ – робот, управляющая программа которого может полностью или частично формироваться автоматически в соответствии с поставленным заданием и в зависимости от состояния рабочей среды.
МАНИПУЛЯЦИОННЫЙ РОБОТ – робот для выполнения двигательных функций, аналогичных функциям руки человека.
СТАЦИОНАРНЫЙ МАНИПУЛЯЦИОННЫЙ РОБОТ – манипуляционный робот, закрепленный на неподвижном основании.
МОБИЛЬНЫЙ РОБОТ-робот, способный перемещаться в рабочей среде в соответствии с управляющей программой. «Мобильный робот» может быть снабжен манипулятором.
К мобильным роботам не относятся передвижные манипуляционные роботы, которые могут быть оперативно перемещены в рабочей среде вручную или при помощи транспортных средств с ручным управлением.
ПЕДИПУЛЯТОР – часть мобильного робота, предназначенная для воспроизведения функций опорно-двигательного аппарата человека или животного.
РОБОТИЗАЦИЯ – автоматизация ручного или рутинных видов умственного труда человека с применением роботов.
РОБОТИЗИРОВАННЫЙ КОМПЛЕКС – совокупность одного или нескольких промышленных роботов, другого технологического оборудования и оснастки для выполнения единого технологического процесса.
РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА – робот с оснасткой или роботизированный комплекс, выполняющий технологический процесс.
1.2. Назначение и классификация робототехнических систем
Робототехнические системы можно разделить на три больших классa [38]:
1.Манипуляционные робототехнические системы;
2.Мобильные робототехнические системы;
3.Информационные и управляющие робототехнические систе-
мы.
11
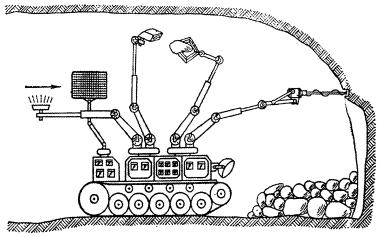
Информационные и управляющие робототехнические системы представляют собой комплексы измерительно-информационных и управляющих средств, автоматически производящих сбор, обработку и передачу информации, а также использование ее для формирования различных управляющих сигналов. Примером могут служить необитаемые подводные аппараты, снабженные измеритель- но-информационными и управляющими устройствами и автоматической аппаратурой для определения свойств воды и дна, для обработки, обнаружения и опознания предметов с автоматической выдачей информации. На рис. 1.1 изображен информационный технический робот, представляющий собой робототехническую систему способную получать, перерабатывать и передавать информацию о состоянии окружающей среды (температуры, влажности, взрывоопасности, запыленности, шума, состава рудничного воздуха и т.д.) для обеспечения технологического процесса добычи полезных ископаемых.
Рис. 1.1
Мобильные робототехнические системы представляют собой платформы или шасси, перемещением которых управляет автоматика. При этом они имеют запрограммированную автоматическую адресовку цели, могут автоматически нагружаться и разгружаться, осуществлять доставку заготовок и инструментов к станкам и деталей от станков на склад.
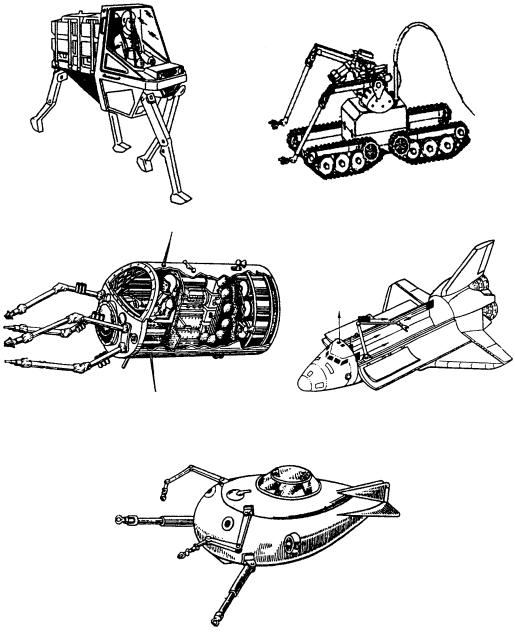
Мобильные робототехнические системы могут быть колесными, шагающими (рис. 1.2), колесношагающими, гусеничными (рис. 1.3), летающими (рис. 1.4, а,б), плавающими (рис. 1.5).
Манипуляционные робототехнические системы можно разделить на три вида:
1. Автоматически действующие роботы, автоматические манипуляторы и роботизированные технологические комплексы;
12
2.Дистанционно управляемые роботы, манипуляторы и технологические комплексы;
3.Ручные.
Автоматически действующие роботы применяют в основном в промышленном производстве.
В зависимости от способа задания и отработки управляющей программы их делят на четыре рода: жестковстроенные, программные, адаптивные, интеллектные.
Рис. 1.2 |
Рис. 1.3 |
а) |
б) |
|
Рис. 1.4 |
Рис. 1.5
Жестковстроенные роботы еще не являются собственно роботами, поэтому они представляют собой нулевое (дороботное) поколение. Они не имеют перестраиваемых программных управляющих
13
устройств. Это механические руки (автооператоры) жестко связанные с остальным технологическим оборудованием, которые выполняют строго определенную работу в соответствии с заранее подготовленной программой, вне зависимости от изменения условий внешней среды.
Программные роботы (первое поколение роботов) обладают возможностью корректировки, переналадки и смены управляющих программ в зависимости от условий внешней среды. Но после каждой переналадки они повторяют многократно одну и ту же жесткую программу в строго определенной обстановке с определенно расположенными предметами.
Адаптивные роботы (второе поколение роботов) (рис. 1.6) могут самостоятельно в большей или меньшей степени ориентироваться в нестрого определенной обстановке, приспосабливаясь к ней. Для этого их снабжают датчиками, реагирующими на обстановку, и системой обработки информации от датчиков для выработки сигналов адаптивного управления, т.е. гибкого изменения программного движения исполнительного устройства в соответствии с фактической обстановкой.
Интеллектные роботы (третье поколение роботов) (рис. 1.7) имеют более богатое очувствление, включая техническое зрение, с микропроцессорной обработкой информации, выработкой роботом решения о своих дальнейших действиях для выполнения нужных технологических операций в неопределенной или меняющейся обстановке – это роботы с элементами искусственного интеллекта.
Рис. 1.6 |
Рис. 1.7 |
Поколения роботов не сменяют друг друга, а существуют параллельно, развиваясь внутри каждого из них. Дистанционно управляемые роботы и манипуляторы применяют главным образом в экстремальных условиях, т.е. при наличии радиации, загазованности, взрывоопасности, высоких и низких температур, и давлений. Их делят на шесть родов: манипуляторы с командным управ-
14
лением, полуавтоматические манипуляторы, роботы с супервизорным управлением, роботы с комбинированным управлением, роботы с диалоговым (интерактивным) управлением.
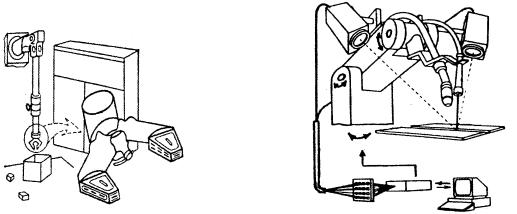
Манипуляторы с командным управлением отличаются тем, что человек – оператор включает по отдельности приводы каждой степени подвижности манипулятора дистанционно путем нажатия на соответствующие кнопки и тумблеры (рис. 1.8,а).
Копирующие манипуляторы управляются дистанционно человеком – оператором с удаленного места при помощи задающего устройства кинематически подобного рабочему манипулятору (рис. 1.8, б). При этом движение каждого задающего механизма передается на соответствующую степень подвижности рабочего манипулятора по принципу следящей системы. Копирующие манипуляторы применяют в экстремальных условиях при наличии радиации, загазованности и т.д.
Полуавтоматические манипуляторы в качестве задающего устройства на
пульте оператора имеют компактную а) многостепенную управляющую рукоятку, кинематика которой может быть произвольной, удобной для малых движений руки человека. Снимаемые с нее электрические сигналы преобразуются с помощью специализированного вычис- б) лителя (ЭВМ) в сигналы управления на приводы манипулятора (рис. 1.8, в).
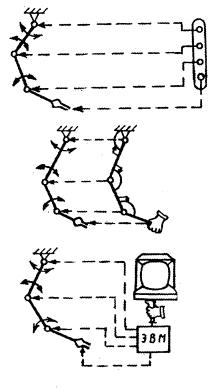
Роботы с супервизорным управлением характеризуются тем, что все элементы выполняемых ими операций запрограммированы и могут воспроизво- в) диться автоматически. Человек – оператор, наблюдающий дистанционно за действиями робота, подает только отдельные целеуказательные команды, по сигналам которых включаются те или
иные программы автоматического действия робота (рис. 1.9). За человеком остается лишь функция распознавания обстановки и принятия решения.
Роботы с комбинированным управлением – это роботы, в которых сочетаются автоматические режимы (как у роботов с супервизорным управлением) с режимами управления от руки (как у полуавтоматического или копирующего манипулятора) (рис. 1.10).
15
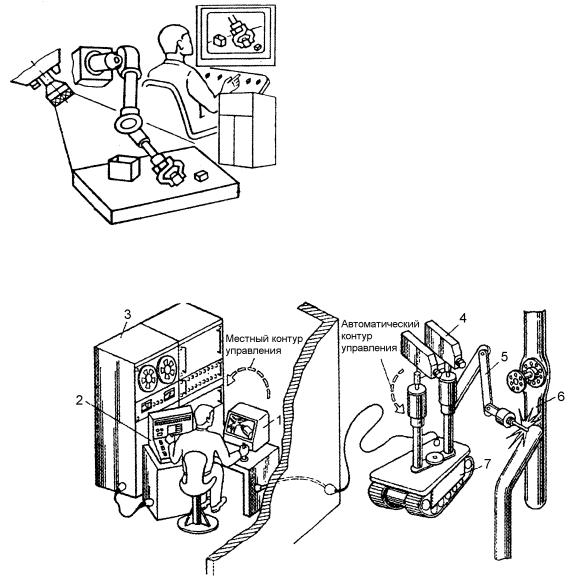
Роботы с диалоговым (интерактивным) управлением, как правило (но не обязательно), являются интеллектными и отличаются от супервизорных тем, что робот не только принимает команды человека для их исполнения, но и сам активно участвует в распознавании обстановки и принятии решения, помогая в этом человеку – опера-
тору (рис. 1.10).
Рис. 1.9
Рис. 1.10
Ручные робототехнические системы делятся на два рода: шар- нирно-балансирные манипуляторы и экзоскелетоны (усилители конечностей человека).
Шарнирно-балансирный манипулятор представляет собой многозвенный механизм с приводом в каждой степени подвижности, который при любой величине удерживаемого объекта (в пределах его грузоподъемности) при любом расположении звеньев в пространстве находится в равновесии (рис. 1.11). Поэтому человек, взявшись за рукоятку манипулятора, легко может перемещать большой груз. Двигая рукоятку человек осуществляет подачу управляющих сигналов, при этом вся работа по перемещению груза выполняется приводами, размещенными в степенях подвижности манипулятора.
Ручные роботы применяют для погрузочно-разгрузочных работ.
16
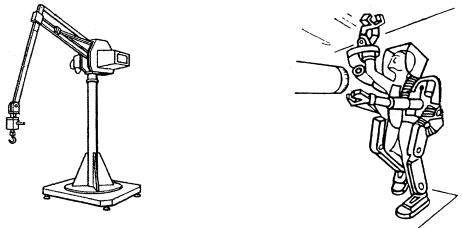
Рис. 1.11 |
Рис. 1.12 |
Экзоскелетоны – многозвенные механизмы, звенья которых непосредственно сопряжены с руками или ногами человека (рис. 1.12). В кинематических парах механизма, соответствующих суставам человека, помещены управляющие двигатели, берущие на себя всю тяжесть работы. Движения самого человека формируют лишь сигналы управления. Такие системы применяют для усиления конечностей (корпуса) человека (как здорового, так и больного).
1.3.Промышленные роботы и их классификация
Всовременном производстве наблюдается существенное противоречие между возможностями традиционных средств автоматизации и характером тех тяжелых и часто опасных простых трудовых процессов, для выполнения которых вынужденно привлекается человек. Загрузка и разгрузка машин, процессы выборки, сортировки, сварки, ковки, штамповки, окраски и т.д. – эти, внешне несложные и часто не требующие от оператора высокой квалификации процессы, вместе с тем, связаны с выполнением сложных и разнообразных, свойственных только человеку движений, не поддающихся, как правило, автоматизации традиционными методами. Поэтому во многих странах ведутся широкие исследования по созданию, совершенствованию и применению нового класса автоматических машин (роботов) – промышленных роботов.
ПРОМЫШЛЕННЫЙ РОБОТ (ПР) – робот предназначенный для выполнения технологических и (или) вспомогательных операций в промышленности. В ГОСТе 25686–85 «Манипуляторы, автооператоры и промышленные роботы. Термины и определения» дается следующее определение промышленного робота.
17
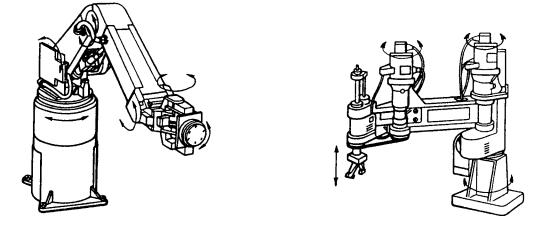
ПРОМЫШЛЕННЫЙ РОБОТ (ПР) – автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций. На рис. 1.13 изображен промышленный робот «Cincinnati – 3T» (США), предназначенный для сварки, клепки, зачистки, на рис. 1.14 – промышленный робот SR – 2 типа SKILAM для сборочных операций, на рис. 1.15 – промышленный робот IRB – 6 (Швеция) для дуговой электросварки, загрузки оборудования, сборки, на рис. 1.16 – промышленный робот «Fanuc – 0» (Япония) для загрузки металлорежущих станков, на рис. 1.17 – промышленный робот РМ – 01 (РФ) для сборки и монтажа изделий, загрузки, дуговой сварки, на рис. 1.18 – промышленный робот ТУР – 10КМ (РФ) для дуговой электросварки, загрузки оборудования, сборки.
Рис. 1.13 |
Рис. 1.14 |
Промышленные роботы классифицируют: 1. По характеру выполняемых операций:
технологические (производственные) – выполняют основные операции технологического процесса (гибка, сварка, сборка, окраска и т.д.);
вспомогательные (подъемно – транспортные) – применяют при обслуживании основного технологического оборудования для автоматизации вспомогательных операций (установки – снятия заготовок, деталей и инструмента, а также на транспортно – складских операциях);
универсальные – выполняют различные операции и в том числе работы совместно с различными видами оборудования.
18
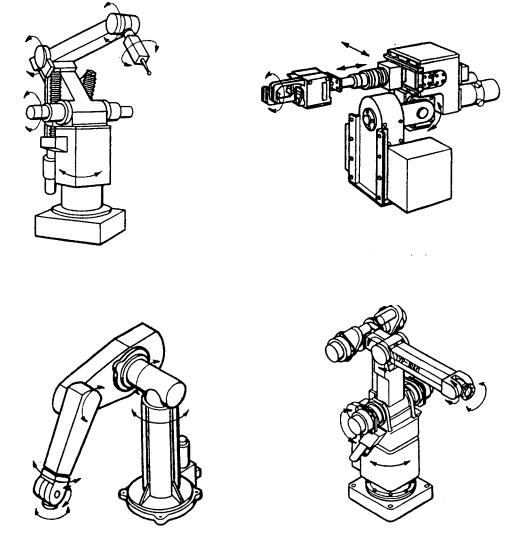
Рис. 1.15 |
Рис. 1.16 |
Рис. 1.17 |
Рис. 1.18 |
2. По степени специализации:
специальные – выполняют определенную технологическую операцию или обслуживают конкретную модель основного технологического оборудования;
специализированные (целевые) – выполняют технологические операции одного вида (сборка, сварка и т.д.) или обслуживают широкую номенклатуру моделей основного технологического оборудования, объединенных общностью манипуляционных действий;
многоцелевые – выполняют различные основные и вспомогательные операции.
3. По области применения и виду производства:
литейные, штамповочные, сварочные, механической обработки, термообработки, нанесения покрытий, сборочные, автоматического контроля, лазерной обработки, транспортно – складские и прочие.
19
4.По виду систем координат, в которых они работают: прямоугольная (плоская и пространственная); полярная (плоская, цилиндрическая и сферическая); ангулярная или угловая (плоская, цилиндрическая и сферическая).
5.По числу степеней подвижности: с одной, двумя, тремя, четырьмя степенями подвижности и со степенями подвижности более четырех.
6.По грузоподъемности: сверхлегкие – грузоподъемность до 1 кг; легкие – свыше 1 до 10 кг; средние – свыше 10 до 200 кг; тяжелые – свыше 200 до 1000 кг; сверхтяжелые – свыше 1000 кг.
7.По мобильности (подвижности): стационарные и подвиж-
ные.
8.По способу установки на рабочем месте: встроенные в оборудование, напольные, подвесные.
9.По типу силового привода: электромеханические, пневматические, гидравлические, комбинированные.
10.По месту расположения приводов: в едином блоке, на подвижных звеньях, комбинированная компоновка.
11.По количеству манипуляторов: c одним, двумя, тремя и четырьмя манипуляторами.
12.По исполнению: нормального, пылезащитного, теплозащитного, влагозащитного, взрывобезопасного и т.д. исполнения.
13.По быстродействию: малое – линейные скорости по отдельным степеням подвижности до 0,5 м/с; среднее – линейные скорости свыше 0,5 до 1 м/с; высокое – линейные скорости свыше
1м/с.
14.По точности позиционирования: малая – погрешность позиционирования от 1 мм и выше; средняя – погрешность позиционирования от 0,1 до 1 мм; высокая – погрешность позиционирования менее 0,1 мм.
15.По характеру отработки программы: жесткопрограммируемые – программа действий содержит полный набор информации, не изменяющейся в процессе работы; адаптивные – осуществляют свои действия с использованием информации об объектах и явлениях внешней среды, полученной в процессе работы. Имеют сенсорное обеспечение, позволяющее корректировать управляющую программу; гибкопрограммируемые – способны формировать программу своих действий на основе поставленной цели и информации об объектах и явлениях внешней среды.
16.По характеру программирования: позиционные – движение осуществляется от точки к точке; контурные – движение осуществляется по непрерывной траектории; комбинированные.
20