

Глава 5. Стационарные режимы сар
5.1. Основные понятия
Как всякая динамическая система САР может находиться в двух состояниях: стационарном (установившемся) и переходном.
Статический стационарный режим - это режим, при котором система находится в состоянии покоя вследствие того, что все внешние воздействия и параметры самой системы не меняются во времени.
Динамический стационарный режим - это режим, возникающий тогда, когда приложенные к системе внешние воздействия изменяются по какому-либо установившемуся закону, в результате чего система приходит в режим установившегося вынужденного движения.
Стационарные динамические режимы, в свою очередь, могут быть двух типов: детерминированными и случайными. При первом режиме на систему действует детерминированное (регулярное) стационарное воздействие. В качестве примера можно назвать установившийся гармонический режим, описываемый частотными характеристиками.
Второй режим - стационарный случайный является установившимся в статистическом смысле и имеет место, когда приложенные к системе воздействия представляют собой случайные, но стационарные функции времени.
5.2. Статический режим сар
Уравнение статики САУ может быть получено по уравнению динамики системы по возмущающему воздействию. В качестве примера рассмотрим одноконтурную САР, структурная схема которой представлена на рис. 5.1.
Передаточная функция замкнутой системы по возмущающему воздействию:
 (5.1)
(5.1)
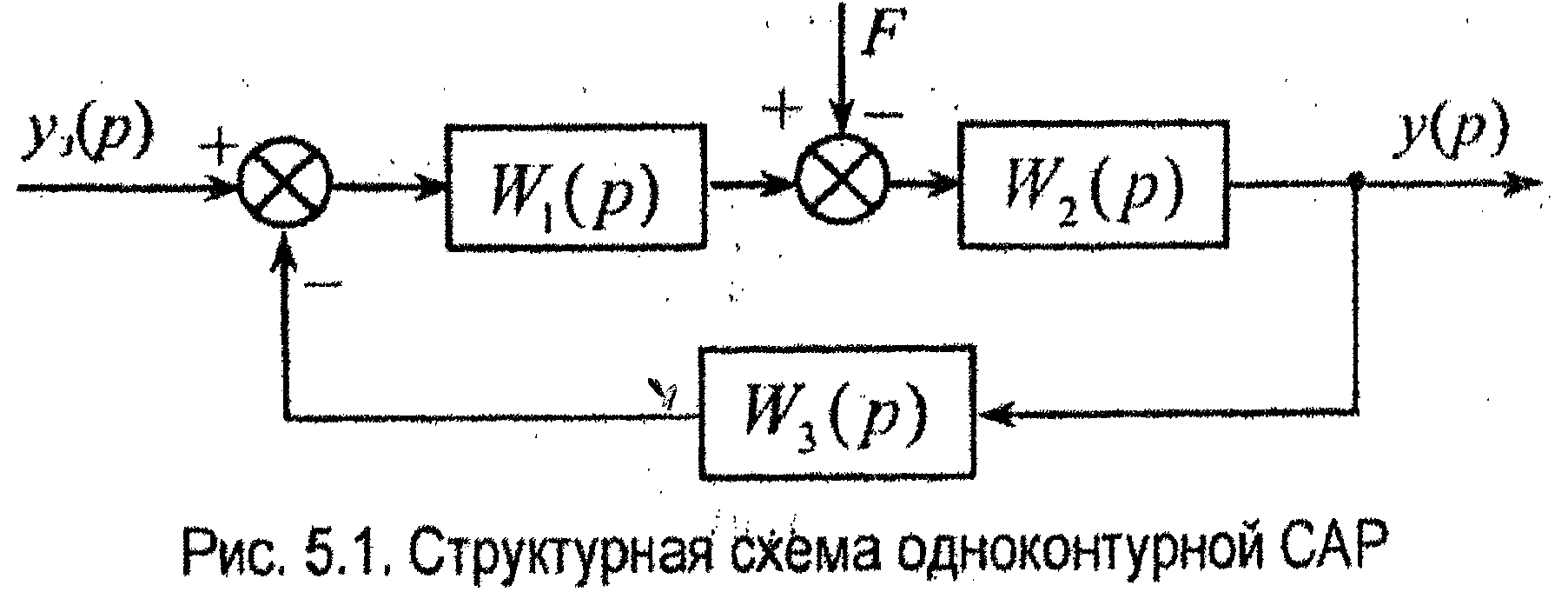
где Wfy(p) = W2(p) - передаточная функция разомкнутой системы по возмущающему воздействию;
W(p)=W1(p)∙W2(p)∙W3(p) - передаточная функция последовательно соединенных звеньев.
Отсюда уравнением статики будет

После окончания переходного процесса, приняв р=0, что соответствует постоянству всех переменных, т.е. равенству нулю всех производных, можно получить уравнение статической характеристики, т.е.
 (5.2)
(5.2)
где уст - статическое приращение выходной величины САР, вызванное приращением внешнего воздействия Fсm.
Вид передаточных функций W(0) и Wfy(0) зависит от того, содержатся ли в системе интегрирующие звенья или нет.
Рассмотрим вначале систему, которая после приведения к одноконтурной системе содержит только статические звенья (инерционные и колебательные). Такие системы называются статическими.
В этом случае при р=0 в выражении (5.1) будем иметь

т.к. знаменатели передаточных функций всех звеньев, входящих сомножителями в выражения W(p) и Wfy(p) при р=0, обращаются в единицу. Следовательно, выражение (5.2) принимает вид
 (5.3)
(5.3)
где k - суммарный коэффициент усиления разомкнутой системы, равный произведению коэффициентов усиления всех звеньев,

kfy - коэффициент усиления прямого канала регулирования по возмущению (от места приложения возмущения до места нахождения выходной величины),

Следовательно, величина kfy определяет статическую зависимость между F и y при разомкнутом контуре системы, т.е. при отсутствии управления. Статическое отклонение выходной величины при возмущающем воздействии Fcm определится
 (5.4)
(5.4)
Сравнивав (5.3) и (5.4), можно заметить, что замыкание системы автоматического управления приводит к уменьшению статической зависимости у от F в (1+k) раз. Таким образом, для уменьшения этой зависимости необходимо увеличить коэффициент передачи системы k.
Из выражения (5.2) можно найти величину статического отклонения, приходящуюся на единицу воздействия F, т. е.
 (5.5)
(5.5)
Эта величина является мерой статической точности системы регулирования и называется статизмом. Статизм иногда обозначается через S.
Для следящей системы, статическая ошибка слежения найдётся из выражения для передаточной функции системы по ошибке.

Для установившегося режима (р=0) статическая ошибка εст определится

Таким образом, охват звена или системы отрицательной обратной связью увеличивает стабильность системы.
Если в системе действует несколько воздействий, то суммарное статическое отклонение может быть определено с учётом этих воздействий
 (5.6)
(5.6)
где
 -
статизм системы по возмущениюFстi.
-
статизм системы по возмущениюFстi.
Таким образом, применение замкнутой системы приводит к повышению статической точности в (1+k) раз.