

2.Специальная часть
2.1Основные параметры объекта регулирования
Управление скоростью механизма качания кристаллизатора предполагает поддержание заданной величины скорости при наличии изменяющегося статического момента, и обеспечение изменения скорости в любой момент времени по команде оператора или локальной системы.
Управление скоростью электропривода осуществляется в зависимости от технологических требований или ограничений, накладываемых механическим оборудованием. Способ управления определяет структуру регулирования скорости всей системы. В данном случае она может быть однозонной, повышение скорости достигается за счёт повышения подводимого напряжения.
Для тиристорного электропривода постоянного тока для непрерывного режима, структурная схема силовой части которого представлена на рисунке 1.6., согласно принципу построения системы подчинённого регулирования координат должны быть организованы два контура регулирования (в соответствии с числом больших постоянных времени). Внешний контур служит для регулирования скорости, внутренний для подчинённого регулирования тока якоря 15.

Рисунок 1.6. – Структурная схема объекта регулирования
Объектом регулирования внутреннего контура является тиристорный преобразователь (ТП) и якорная цепь двигателя (ЯЦ), а внешнего – механическая часть привода (М).
Согласно принятым на практике критериям оптимизации по модульному и симметричному оптимуму, регулятор тока выбирается пропорционально- интегральным (ПИ-РТ), а регулятор скорости выбирается пропорциональным (П-РС) или пропорционально- интегральным (ПИ-РС).
Рассчитаем основные параметры объекта регулирования.
Эквивалентное сопротивление силовой цеп системы ТП-Д:
![]() =
=![]() Ом,
Ом,
где ав = 2 – коэффициент трёхфазной мостовой схемы;
m = 3 – число фаз.
Эквивалентная индуктивность силовой цепи системы ТП-Д:
![]() Гн,
Гн,
где Lя – индуктивность якоря двигателя
Эквивалентная электромагнитная постоянная времени якорной цепи:
![]() с.
с.
Постоянная двигателя при номинальном магнитном потоке:
![]()
![]() .
.
Суммарный момент инерции электропривода, приведённый к валу двигателя :
![]() кгм2,
кгм2,
Электромеханическая постоянная времени электропривода
![]() с.
с.
Коэффициент обратной связи по скорости
![]()
![]() .
.
Коэффициент обратной связи по якорному току
![]() В/A,
В/A,
Постоянная времени тиристорного преобразователя:
![]()
Для осуществления обратной связи по скорости в соответствии с номинальной скоростью вращения двигателя выбирается тахогенератор ПТ-42-УХЛ4. Технические данные тахогенератора представлены в таблице 1.3.
Таблица 1.3 – Технические данные тахогенератора ПТ-42-УХЛ4
|
Наименование |
Величина |
|
1. Номинальная скорость вращения, nнтг, Об/мин |
200 |
|
2. Напряжение якоря, Uтг, В |
230 |
|
3. Ток якоря, Iятг, А |
0,25 |
|
4. Ток возбуждения, Iвтг, А |
1,1 |
|
5. Сопротивление обмотки якоря, Rятг, Ом |
78,7 |
|
6. Сопротивление обмотки возбуждения, Rвтг, Ом |
41,6 |
|
7. Напряжение возбуждения, Uвтг, В |
55 |
Тахогенераторы серии «ПТ» предназначены для работы в качестве датчиков скорости в системах автоматического регулирования частоты вращения электродвигателей прокатных станов. Условное обозначение тахогенератора означает:
ПТ – тахогенератор постоянного тока;
4 – условное обозначение габарита машины;
2 – условное обозначение активной длины якоря;
УХЛ4 – климатическое исполнение и категория размещения по ГОСТ 15150-69.
Тахогенераторы при номинальных данных и при изменении частоты вращения вниз от номинальной в диапазоне 1:4, но не ниже 50 об/мин, должны иметь следующие уровни пульсации напряжения:
1) оборотные пульсации, не более 0.25%;
2) полюсные пульсации, не более 0.50%;
3) зубцовые пульсации, не более 1.40%;
4) коллекторные пульсации, не более 0.60%.
Принципиальная схема электрической части представлена на рисунке 1.3.

Рисунок 1.3 Принципиальная схема электрической части
2. Построение системы автоматического регулирования
2.1 Построение контура регулирования тока якоря
При расчете параметров контура тока при работе в зоне непрерывного тока делаются следующие допущения:
1) пренебрегают внутренней обратной связью по ЭДС двигателя;
2) параметры якорной цепи остаются стабильными.
Структурная схема объекта регулирования тока приведена на рисунке 2.1.

Рисунок 2.1 – Структурная схема контура регулирования тока
Общая формула оптимального регулятора i – го контура имеет вид:
![]()
где i – номер контура регулирования;
![]() -
передаточная функция объекта регулирования
i
- го контура регулирования;
-
передаточная функция объекта регулирования
i
- го контура регулирования;
Kоi, Koi–1 – коэффициенты обратных связей i - го и i – 1- го контура регулирования соответственно.
Передаточная функция регулятора тока имеет вид:
![]() ;
;
где
![]() - постоянная интегрирования регулятора
тока;
- постоянная интегрирования регулятора
тока;
Тµ – некомпенсируемая постоянная времени (тиристорного преобразователя), в расчётах обычно принимают (410)мс. Принимается 6 мс;
Передаточная функция замкнутого контура регулирования якорного тока имеет вид:
 .
.
2.2 Анализ влияния внутренней обратной связи по ЭДС двигателя.
Компенсация влияния ЭДС.
При построении контура регулирования тока внутренняя обратная связь по ЭДС не учитывается, однако в реальной системе регулирования она снижает интенсивность разгона и торможения. Уменьшает якорный ток ниже уровня токоограничения в пускотормозных режимах и увеличивает его в стопорных режимах, когда момент сопротивления значительно превышает допустимый для механизма, а также снижает коэффициент усиления контура тока. Все это отрицательно сказывается на производительности и надежности электропривода.
Относительная ошибка регулирования по току при скачке задания составляет:
![]() .
.
Следовательно необходимо применение дополнительной положительной обратной связи компенсирующую влияние обратной связи по ЭДС двигателя.
Структурная схема контура тока с учетом ЭДС двигателя представлена на рисунке 2.2.

Рисунок 2.2 – Контур тока с учетом ЭДС двигателя.
Коэффициент Обратной связи по ЭДС двигателя (датчика ЭДС) определяется по формуле:
![]() .
.
2.3. Оценка величины производной якорного тока. Задатчик интенсивности тока.
Одним из факторов, ограничивающих быстродействие САР электропривода, является предельно допустимая скорость нарастания якорного тока. Это ограничение обусловлено ухудшением коммутации машины при повышении производной тока, а также особенностями механической части оборудования из – за возможной необходимости ограничения скорости нарастания момента (тока), т.е. ограничения рывка.
Максимальное значение производной тока определяется по следующей формуле:
![]() ,
,
![]() .
.
Допустимое
значение темпа нарастания якорного
тока 50-110
![]() ,
следовательно необходимо применение
задатчика интенсивности тока. На рисунке
2.3 показана структурная схема задатчика
интенсивности тока, постоянная времени
интегратора которого определяется
выражением:
,
следовательно необходимо применение
задатчика интенсивности тока. На рисунке
2.3 показана структурная схема задатчика
интенсивности тока, постоянная времени
интегратора которого определяется
выражением:
![]() ,
с.
,
с.
где
![]() - напряжение ограничения релейного
элемента (
- напряжение ограничения релейного
элемента (![]() В).
В).

Рисунок 2.3 Структурная схема задатчика интенсивности тока.
2.4 Построение контура регулирования скорости.
Составными частями контура регулирования скорости двигателя являются механическое звено объекта управления, оптимизированный токовый контур, регулятор скорости и отрицательная обратная связь по скорости (рисунок 2.4.).

Рисунок 2.4. – Структурная схема контура регулирования скорости
В зависимости от требований предъявляемых технологией к электроприводу механизмов, контур скорости выполняют однократно-интегрирующим (с П - регулятором) или двухкратно-интегрирующим (с ПИ-регулятором).
При приложении статического момента в САР с П – РС появляется статическая просадка скорости, определяемая соотношением:
![]()
![]() .
.
что в процентном соотношении составляет 9% от номинальной скорости.
Для механизма качания кристаллизатора статическая ошибка не должна превышать 2%, следовательно необходимо применение ПИ – РС скорости.
Передаточная функция ПИ – РС определяется по формуле:

 .
.
Для снижения перерегулирования в САР при управлении со стороны задания на входе ПИ – РС необходимо включать фильтр с передаточной функцией:
![]() .
.
2.5 Задатчик интенсивности скорости
Для ограничения максимального значения ускорения привода, перед регулятором скорости устанавливается задатчик интенсивности скорости ЗИС.
Допустимый динамический ток составляет величину равную 1,5·Iн, тогда максимальное ускорение привода составит:
![]()
Постоянная времени задатчика интенсивности скорости найдётся по формуле:
![]()
где U0 = 10 В – напряжение ограничения ЗИС.
Структурная схема задатчика интенсивности скорости представлена на рисунке 2.5.
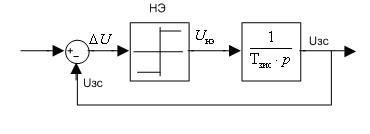
Рисунок 2.5 – Задатчик интенсивности скорости