

2. Лабораторная установка
Лабораторная установка смонтирована на щите управления. Функционально – принципиальная схема установки изображена на рис. 7, а размещение элементов АСР – на рис.8.
Объект управления состоит из электрической печи с нагревателем сопротивления, безынерционного электронного регулируемого источника напряжения питания нагревателя и автоматического потенциометра КСП3, подключённого к термопареТП, измеряющей температуру печи.
Регулирующим органом РОявляется потенциометр, положение движка которого задаёт напряжение источника питания нагревателя. Входной валРОперемещается исполнительным механизмомИМ. ПоложениеИМопределяется сигналом регулирующего прибора Р25.1 как в автоматическом, так и в дистанционном режимах. В последнем случае для управленияИМиспользуется станция управления Р25.1, в которой совмещены функции переключателя управления«Ручное»–«Автоматическое»и ключа управления«Меньше» – «Больше».В качестве дистанционного указателя положенияДУПисполнительного механизма используется прибор, встроенный в регулирующий прибор Р25.1.
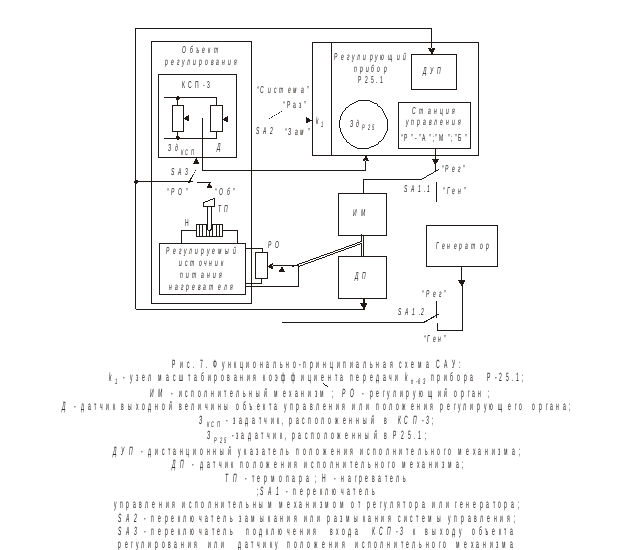 Задание
системе управления устанавливается
разными задатчиками, один из которыхЗдР25находится в Р25.1, а
другойЗдКСПвстроен вКСП3. Система управления может быть
замкнута или разомкнута переключателемSA2, включённым в
цепь сигнала с реохордаКСП3,
являющегося датчикомДтемпературы
объекта.
Задание
системе управления устанавливается
разными задатчиками, один из которыхЗдР25находится в Р25.1, а
другойЗдКСПвстроен вКСП3. Система управления может быть
замкнута или разомкнута переключателемSA2, включённым в
цепь сигнала с реохордаКСП3,
являющегося датчикомДтемпературы
объекта.
Для получения динамических частотных характеристик объекта управления установка содержит инфранизкочастотный генератор синусоидальных колебаний, сигнал с выхода которого может быть подключён ко входу регулируемого источника питания нагревателя вместо сигнала от ИМпереключателемSA1. Органами управления генератором служат:
переключатель периода колебаний 14(рис.8) на11позиций;
переключатель величины масштаба записи колебаний 12, с помощью которого на высоко-частотном конце диапазона масштаб записи колебаний может быть увеличен в 2 раза;
р егулятор
смещения нулевой линии колебаний,
позволяющий совместить нулевую линию
с любой точкой статической характеристики
объекта;
егулятор
смещения нулевой линии колебаний,
позволяющий совместить нулевую линию
с любой точкой статической характеристики
объекта;
индикатор работы генератора 15с нулём посередине шкалы, измеряющий текущее значение сигнала на выходе генератора относительно нулевой линии;
выключатель 16для прекращения колебаний генератора в любой момент времени с сохранением на выходе генератора достигнутой величины сигнала.
Для измерения угла фазового сдвига между сигналами на входе и выходе объекта регулирования генератор снабжён схемой, подающей на перо КСП3отметку («зарубку»), совпадающую с моментом перехода выходного сигнала генератора через минимальное значение.
Дополнительной функцией лабораторной установки является возможность подключения КСП3с помощью переключателяSA3к датчику положенияДПисполнительного механизма для измерения и записи перемещения последнего.
Все технические данные установки приведены в таблице, закреплённой на щите управления.
3. Программа работы и её выполнение
1 ).
Определить статическую характеристику
объекта регулирования по каналу задания.
Для этого собирается схема по рис. 9.
).
Определить статическую характеристику
объекта регулирования по каналу задания.
Для этого собирается схема по рис. 9.
Статическую характеристику снимают в режиме управления «Ручное»(переключатель управления6на рис. 8), в котором система управления разомкнута. Переключатель11 SA1должен быть установлен в положение«Регулятор»,переключатель17 SA3– в положение«Объект».Исполнительным механизмом управляют ключом управления7. Входное воздействие осуществляют, устанавливая исполнительный механизм в различные положения (отсчет в долях полного хода по шкалеДУП 8), выходную величину отсчитывают по шкалеКСП3в единицах температуры или по записи на диаграмме, предварительно проградуировав её в единицах температуры. Коэффициент передачи объекта будет при этом именованной величиной.
По полученным из опыта значениям следует построить график статической характеристики в координатах: положение вала ИМв долях полного хода – температура печи в градусах.
На статической характеристике нужно выделить линейную часть и найти середину линейного участка – центр опыта. Определить диапазон изменения входного параметра в пределах линейной части статической характеристики.
2). При той же схеме по рис. 9 определить динамическую характеристику объекта регулирования, выполнив следующие операции:
а) по показаниям ДУПустановить валИМв центр опыта в режиме управления«Ручное»;
б) после прекращения изменения температуры объекта изменить скачком положение вала ИМна0,1…0,15 полного хода и сделать записи переходного процесса; после расшифровки записей построить график динамической характеристики;
в) согласно п. 1.1 определить параметры приближённых моделей объекта второго и первого порядков с запаздыванием;
г) определить динамические параметры настройки регулятора по формуле (10).
3 ).
Собрав схему по рис. 10, определить АФЧХ
объекта регулирования и рассчитать
оптимальные параметры настройки
ПИ-регулятора, выполнив следующие
операции.
).
Собрав схему по рис. 10, определить АФЧХ
объекта регулирования и рассчитать
оптимальные параметры настройки
ПИ-регулятора, выполнив следующие
операции.
а) Установить SA1в положение«Регулятор», SA3в положение«Объект»,переключателем10включить питание генератора, поставить переключатель14в одно из первых положений (длительные периоды колебаний). Наблюдая колебания генератора по индикатору15, прекратить переключателем16колебания генератора в момент перехода колебаний через нулевую отметку. ПереключательSA1перевести в положение«Генератор»и регулятором смещения нулевой линии13установить выходную величину в центр опыта по окончании переходного процесса.
б) Пустить генератор переключателем 16и при всех положениях переключателя периода колебаний генератора14сделать записи двух-трёх периодов выходной величины. При необходимости на высокочастотном конце диапазона увеличить вдвое амплитуду записи (изменить вдвое масштаб).
в) Обработать регистрограммы, вычислив при каждой частоте амплитуду колебаний выходной величины Bи угол фазового сдвига, и построить АЧХ, ФЧХ и АФЧХ объекта.
Для построения АФЧХ надо знать отклонение А0на нулевой частоте и соответствующую ему величину выходной переменнойВ0(коэффициент передачи объектаkоб). При этом надо иметь в виду, что амплитуда входных колебанийАодинакова на всех частотах.
Для получения kобнадо остановить генератор в момент наибольшего отклонения стрелки индикатора15и дождаться окончания переходного процесса (окончания измененияВ). Это и будет значение выходной величиныВ0, на которое надо делить амплитуды колебанийВна других частотах, чтобы получить АЧХ, ФЧХ и АФЧХ в относительных величинах.
г) По изложенному в п. 1.3. алгоритму рассчитать оптимальные параметры настройки ПИ-регулятора.
4).Реализовать рассчитанные параметры настройки в АСР в следующих этапах.
а) Для расчёта уставок регулятора Р25.1,т.е. градуировки органов его настройки, собрать схему по рис. 11 для определения изменения положения ИМиРОв функции изменения сигнала задания регулятору . Для этого надо:
у становить
переключатель11 SA1в положение«Регулятор»;
становить
переключатель11 SA1в положение«Регулятор»;
установить переключатель 9 SA2в положение«Система разомкнута»;
установить переключатель 17 SA3в положение«ИМ»;
установить постоянную времени демпфирования Tдф = 0;
отградуировать шкалу КСП3 в долях перемещения ИМ, устанавливаяИМпо показаниям ДУПв начальное и конечное положения в режиме управления«Ручное»;
с помощью задатчика ЗдКСП КСП3 установить указатель задания в положение центра опыта, стрелку ручки3 «Задание»задатчикаЗдР25Р25.1 поставить на нуль шкалы, в режиме управления«Ручное»поставитьИМв положение, соответствующее центру опыта, и ручкой«Корректор»Р25.1, выведенной «под шлиц», сбалансировать регулятор;
с помощью ручки 5установкиTи и кнопочного переключателя Р25.1 задать постоянную времениTиз = 500 с;
установить ручку 2узла масштабированияk1Р25.1 в положение1,0, а ручку4 установкиkп-63– последовательно в ходе опытов в требуемые положения;
переключатель режимов работы Р25.1 установить в положение «ПИ-регулирование»;
одновременнопереставить стрелку задатчика КСП-3 на +10% и переключателем управления в Р25.1 включить режим«Автоматическое»; Р25.1 отработает рассогласование, и на регистрограмме получится ломаная линия, первый прямолинейный участок которой будет соответствовать пропорциональной и интегральной составляющим переходной характеристики, а второй – только интегральной.
повторить опыт при изменении задания на –10%.
Отношение величины перемещения РОна прямолинейном участке за вычетом интегральной составляющей к величине изменения задания представляет собой коэффициент пропорциональностиkрпри заданном положении ручек настройкиkп-63иk1. Иными словами,kриkп-63приk1 = 1,0связаны соотношением
kp = C kп-63,
где С– постоянная, которая определяется из проведённого опыта.
Если ручка-указатель kп-63не сбита со своего правильного положения, полученная постояннаяСпозволяет определятьkpпри любом другом положении ручек настройкиkп-63и k1.
Постоянная времени изодрома Тизсвязана с постоянной времениТисоотношением
Tиз = С Tи ,
которое позволяет переградуировать шкалу Тиручки5Р25.1 в единицах времениTиз.
Если kpвычисляют как безразмерную величину, перемещениеИМи изменение задания должны быть безразмерными величинами,Стакже будет безразмерной величиной. Еслиkp число именованное,Стоже будет именованным. Однако для переградуировки шкалыТинужно использоватьтолько безразмерное значение С.
б )
Собрать АСР температурой печи по рис.
12, для чего:
)
Собрать АСР температурой печи по рис.
12, для чего:
установить SA1в положение«Регулятор»;SA2– в положение«Система замкнута»;SA3– в положение«Объект»;
сбалансировать регулятор в центре опыта.
в) Установить рассчитанные ранее двумя методами значения оптимальных параметров настройки на шкалах Р25.1 и получить регистрограммы переходного процесса при увеличении и уменьшении задания регулятору. Изменение задания производить задатчиком КСП3.
г) Реализовав алгоритм Циглера и Никольса, через параметры критического режима вычислить и реализовать параметры динамической настройки регулятора, получить регистрограммы переходных процессов как описано выше.
5). Построить по регистрограммам графики переходных процессов в АСР и вычислить по ним прямые показатели качества.
6). Сравнить полученные результаты с ожидавшимися и объяснить причины расхождения, если последние есть. Сделать объективные выводы о трудоёмкости использованных методов расчета параметров настройки и близости к результатам, полученным в опытах.