

Л а б о р а т о р н а я р а б о т а № 8
Определение параметров интегрального регулятора и его настройка
Цель работы:
-
изучить свойства и структуру И-регулятора;
-
изучить показатели качества процесса регулирования;
-
научиться определять статические и динамические параметры объекта регулирования и регулятора;
-
изучить способы расчёта настроек и определения уставок И-регулятора;
-
определить параметры САУ с И-регулятором и статическим объектом.
1. Качество регулирования и настройка регулятора
1.1. Возмущения технологического процесса
 Различают
возмущения, связанные с изменением
нагрузки объекта регулирования (вносимые
в объект), и возмущения, возникающие при
установке нового задания регулятору
(вносимые в регулятор). Как следует из
рис. 1, кривые изменения регулируемой
величины хп(t)
в одной и той же системе управления при
однократном скачке изменения нагрузки
и задания регулятору отличаются друг
от друга. Чтобы получить одинаковый
переходный процесс в обоих случаях,
надо изменять настройки регулятора.
Различают
возмущения, связанные с изменением
нагрузки объекта регулирования (вносимые
в объект), и возмущения, возникающие при
установке нового задания регулятору
(вносимые в регулятор). Как следует из
рис. 1, кривые изменения регулируемой
величины хп(t)
в одной и той же системе управления при
однократном скачке изменения нагрузки
и задания регулятору отличаются друг
от друга. Чтобы получить одинаковый
переходный процесс в обоих случаях,
надо изменять настройки регулятора.
Изменение нагрузки является основным источником изменений режима работы регулируемого объекта. Изменение задания играет важную роль в системах программного регулирования.
По продолжительности возмущение может быть длительное, продолжительность которого значительно превышает время регулирования, кратковременное, мгновенное, скачкообразное и монотонное. В данной лабораторной работе изучается влияние длительных скачкообразных возмущений, поэтому в дальнейшем другие виды возмущений не рассматриваются.
Основной показатель возмущения – его величина. При расчёте удобно использовать величину возмущения, выраженную в процентах хода регулирующего органа yв. Так, изменение производительности объекта всегда сопровождается вполне определённым перемещением регулирующего органа, которое необходимо для поддержания установленного значения регулируемой величины, поэтому возмущение по нагрузке может быть сведено к величине перемещения регулирующего органа yв, выражаемого обычно в процентах.
1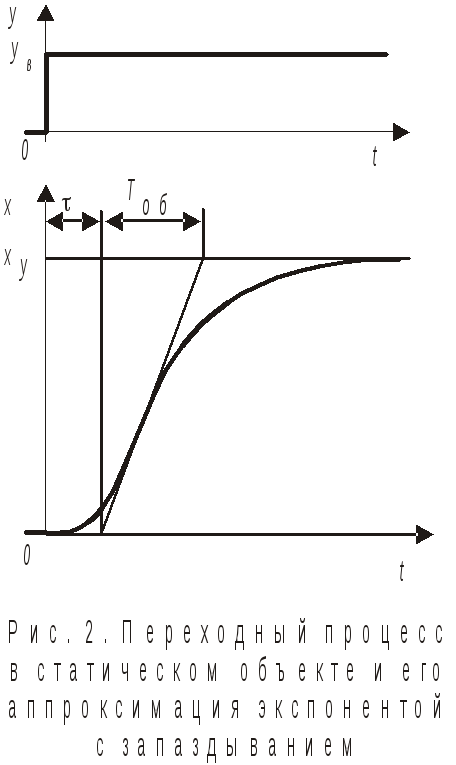 .2.
Качество процесса регулирования
.2.
Качество процесса регулирования
На рис. 2 приведена примерная кривая переходного процесса в статическом объекте (без регулятора) при однократном скачкообразном возмущении на входе объекта yв без регулирующего воздействия. Если возмущение конечно, самовыравнивание через некоторое время приостановит дальнейшее отклонение регулируемой величины от задания, и, таким образом, будет достигнуто новое установившееся значение. Однако возникающее при этом отклонение обычно технологически недопустимо.
Чтобы уменьшить отклонение или полностью устранить его, т.е. возвратить регулируемую величину к заданному значению, необходимо ввести регулирующее воздействие. Степень вводимого регулирующего воздействия определяется типом регулятора и его настройками.
Вид переходного процесса при регулировании определяет качество регулирования.
Р ассмотрим
основные показатели качества процесса
регулирования. Будем рассматривать
процесс регулирования, вызванный
однократным скачкообразным возмущением
как наиболее тяжёлой формой возмущения.
ассмотрим
основные показатели качества процесса
регулирования. Будем рассматривать
процесс регулирования, вызванный
однократным скачкообразным возмущением
как наиболее тяжёлой формой возмущения.
Максимальное динамическое отклонение регулируемой величины от задания в ходе процесса регулирования х1. Это наибольшее отклонение в сходящемся процессе регулирования, оно непосредственно следует за возмущением. Величина этого отклонения имеет большое значение особенно в тех случаях, когда значительное отклонение от задания по технологическим условиям недопустимо, даже временное. Величина х1 зависит от динамических свойств объекта, величины возмущения, принятого закона регулирования и настроек регулятора.
Перерегулирование. Степень колебательности переходного процесса удобно характеризовать величиной перерегулирования – отношением амплитуды второго колебания х2 противоположного направления к х1; это отношение выражается в процентах величины х1. Изменением настроек регулятора можно получить различные перерегулирования: от нуля при апериодическом ходе процесса до 100% при установившихся незатухающих колебаниях и даже свыше 100% при расходящихся колебаниях.
Чем больше перерегулирование, тем более колебателен процесс, тем он продолжительнее, тем меньше первая, максимальная амплитуда х1 при одновременно увеличивающейся амплитуде х2. Выбирая необходимую величину перерегулирования, следует исходить из условий технологического процесса: целесообразности меньших максимальных, но двухсторонних отклонений от задания при более колебательном и длительном процессе регулирования, или односторонних отклонений с большой амплитудой, но при более быстром окончании переходного процесса.
В ремя
регулирования. Продолжительность
регулирова-ния охватывает период времени
tр (рис. 4) с
момента отклонения регулируемой величины
от задания до возвращении её регулятором
к заданному значению. Время tр
зависит от динамических свойств объекта,
принятого закона регулирования и
настроек регулятора. Чтобы характеризовать
воздействие регулятора, время tр
зачастую относят к величине запаздывания
объекта об.
ремя
регулирования. Продолжительность
регулирова-ния охватывает период времени
tр (рис. 4) с
момента отклонения регулируемой величины
от задания до возвращении её регулятором
к заданному значению. Время tр
зависит от динамических свойств объекта,
принятого закона регулирования и
настроек регулятора. Чтобы характеризовать
воздействие регулятора, время tр
зачастую относят к величине запаздывания
объекта об.
В зависимости от настроек регулятора продолжительность переходного процесса может быть различной. Однако она не может быть меньше определённого значения, минимального для регулятора данного типа. Это минимальное время свойственно так называемому граничному апериодическому процессу регулирования (рис. 4.а). Во всех других случаях по обе стороны от границы апериодичности (для затянутых апериодических или колебательных процессов) время регулирования увеличивается (рис. 4. б,в).
1.3. Оптимальные типовые процессы регулирования
Оптимальный процесс регулирования – понятие относительное, всё зависит от конкретных требований со стороны технологического процесса. Наиболее часто встречаются три типовых переходных процесса регулирования:
а) граничный апериодический процесс с минимальным временем регулирования tр (рис. 4.а);
б) процесс с 20%-ным перерегулированием и минимальным временем первого полупериода колебаний (рис. 4.б);
в) процесс с минимальной квадратичной
площадью отклонения, т.е.
![]() (рис. 4.в).
(рис. 4.в).
Граничный апериодический процесс характеризуется минимальным общим временем регулирования tр, полным отсутствием перерегулирования х2 , а также минимальным регулирующим воздействием.
Процесс с 20%-ным перерегулированием является промежуточным и используется, когда некоторое перерегулирование допустимо. При этом уменьшается максимальное динамическое отклонение х1.
Процесс с минимальной квадратичной площадью отклонения отличается наибольшими регулирующим воздействием, перерегулированием (порядка 40…50%) и временем регулирования. Однако он характеризуется наименьшей величиной максимального динамического отклонения х1.
Один их этих типовых процессов почти всегда может удовлетворить технологическим требованиям различных агрегатов, т.е. будет оптимальным.
1.4. Оптимальные настройки регулятора
Рекомендуемые ниже настройки И-регулятора
позволяют получить три указанных выше
типовых процесса регулирования [3].
И‑регулятор имеет закон регулирования
вида
![]() ,
где kр1
– коэффициент передачи регулятора,
характеризующий скорость исполнительного
механизма регулятора при данном
рассогласовании
Коэффициент kр1
измеряется в следующих единицах:
,
где kр1
– коэффициент передачи регулятора,
характеризующий скорость исполнительного
механизма регулятора при данном
рассогласовании
Коэффициент kр1
измеряется в следующих единицах:
![]()
З начение
оптимальной настройки kр1
вычисляется по произведению kр1kоб
об
, которое находится
по графику рис. 5, построенному в
функции отношения времени запаздывания
об
к постоянной времени объекта регулирования
Тоб. Последние, в свою
очередь, в результате элементарных
построений определяются из кривой
разгона объекта (рис. 2). Время запаздывания
об
находится как отрезок на временной
оси, отсекаемый касательной, проведённой
к кривой разгона на её начальном участке
в точке перегиба.
начение
оптимальной настройки kр1
вычисляется по произведению kр1kоб
об
, которое находится
по графику рис. 5, построенному в
функции отношения времени запаздывания
об
к постоянной времени объекта регулирования
Тоб. Последние, в свою
очередь, в результате элементарных
построений определяются из кривой
разгона объекта (рис. 2). Время запаздывания
об
находится как отрезок на временной
оси, отсекаемый касательной, проведённой
к кривой разгона на её начальном участке
в точке перегиба.