

3. Выполнение работы
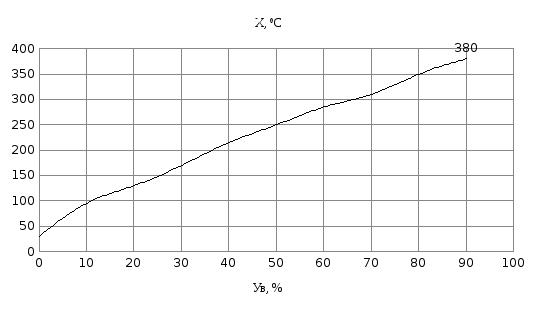
Статические характеристики объекта управления
|
Величина нагрузки |
ИМ % |
Показания КСП–3 0С |
Коб
=
0С / % им |
|
Малая «М» |
0 |
105 |
|
|
10 |
225 |
22,5 | |
|
20 |
310 |
15,5 | |
|
30 |
385 |
12,83 | |
|
Номинальная «Н» |
0 |
10 |
|
|
10 |
105 |
10,5 | |
|
20 |
150 |
7,5 | |
|
30 |
200 |
6,67 | |
|
40 |
245 |
6,13 | |
|
50 |
285 |
5,7 | |
|
60 |
330 |
5,5 | |
|
70 |
360 |
5,14 | |
|
80 |
400 |
5 | |
|
Большая «Б» |
0 |
30 |
|
|
10 |
95 |
9,5 | |
|
20 |
130 |
6,5 | |
|
30 |
170 |
5,67 | |
|
40 |
215 |
5,38 | |
|
50 |
250 |
5 | |
|
60 |
285 |
4,75 | |
|
70 |
310 |
4,43 | |
|
80 |
350 |
4,38 | |
|
90 |
380 |
4,22 |

«М»
Кобср
=
 = 16,9
= 16,9
«Н»
Кобср
=
 = 6,5
= 6,5
«Б»
Кобср
=
 = 5,5
= 5,5
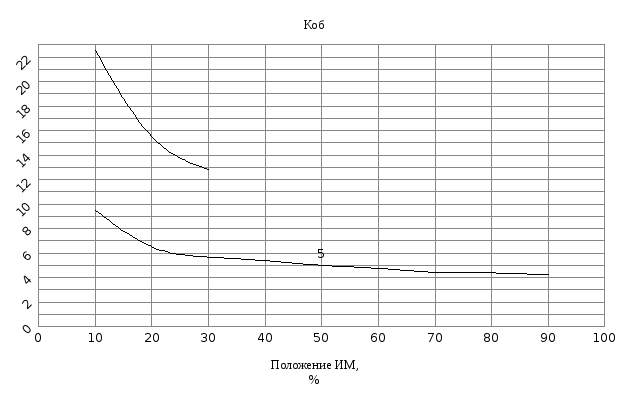
Зависимость Коб от положения ИМ
Временная характеристика объекта
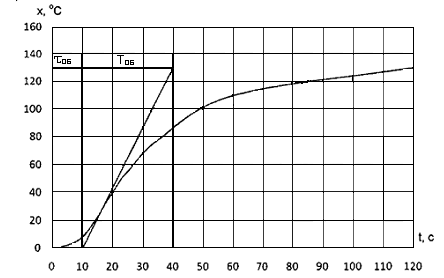
τоб=10 с
Tоб=30 с

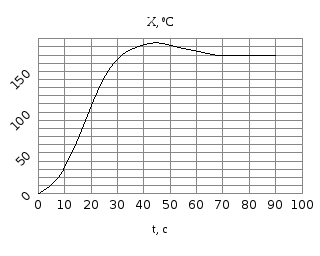
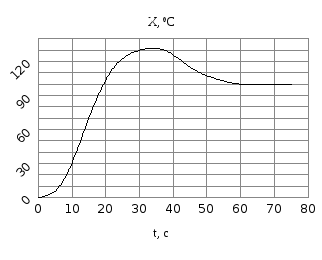
Оптимальные настройки для трех типовых переходных процессов
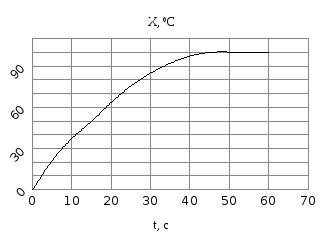
При
Ку
= 3: Кр1
=
 = 0,013 без перерегулирования.
= 0,013 без перерегулирования.
При
Ку
= 6: Кр1
=
 = 0,026 перерегулирование 15%.
= 0,026 перерегулирование 15%.
При
Ку
= 8: Кр1
=
 = 0,01 перерегулирование 32%.
= 0,01 перерегулирование 32%.
Вывод: Изучили показатели качества процесса регулирования: максимальное динамическое отклонение, перерегулирование, время регулирования. Определили статические и динамические параметры объекта. Рассчитали настройки и определили установки регулятора для получения трех типовых процессов регулирования.