

Учебное пособие КТС
.pdfАлгоритм содержит до 2 идентичных независимых каналов. Число этих каналов 0<=m<=2 задается модификатором. Каждый канал связан с соответствующим (по номеру) аналоговым выходом контроллера. Эта связь образуется «автоматически», как только алгоритм АВА (АВБ) вводится в один из алгоблоков контроллера.
Прежде чем поступить на аналоговый выход, входной сигнал умножается на коэффициент и к полученному произведению до- бавляется сигнал смещения. Эти операции позволяют компенси- ровать смещение диапазона и нуля цифро-аналогового преобра- зователя (ЦАП).
Выходной аналоговый сигнал (на выходе ЦАП) равен:
Yi = Xi ×KM,i + XСМ.,i
Если коррекции не требуется, устанавливается масштабный коэффициент Kм,i=1 и сигнал смещения Xсм,i=0.
Назначение вводов – выходов алгоритмов АВА(11), АВБ(12) приведено в табл. 55. Функциональная схема алгоритма приведе- на на рис. 80.
|
|
|
Таблица 55 |
|
|
Входы алгоритма АВА и АВБ |
|||
|
|
|
|
|
Номер |
Обозначение |
Вх-Вых |
Назначение |
|
01 |
Х1 |
Вход |
Вход канала 1 |
|
02 |
Хсм1 |
“ |
Смещение канала 1 |
|
03 |
Км1 |
“ |
Диапазон канала 1 |
|
04 |
Х2 |
“ |
Вход канала 2 |
|
05 |
Хсм2 |
“ |
Смещение канала 2 |
|
06 |
Км2 |
“ |
Диапазон канала 2 |
|
Алгоритмы ДВА(13), ДВБ(14) дискретный вывод групп А и Б
Алгоритм применяется для связи функциональных алгорит- мов с аппаратными средствами дискретного вывода (с цифро- дискретным преобразователем ЦДП). Для связи с выходами А и В используются соответственно алгоритмы ДВА (ДВБ). Каждый ал- горитм обслуживает до 16 дискретных выходов. Алгоритм содер- жит несколько идентичных независимых каналов, число которых 0<=m<=16 и задается модификатором.
213
Если на i -й вход алгоритма поступает сигнал Di=0, контакты i-го дискретного выхода разомкнуты. Если Di=1, контакты i -го дис- кретного выхода замыкаются.
|
|
Код11(12) |
|
m = 00 - 02 |
МВ - отсутств |
|
||||
|
X1 |
|
|
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
|
|
|
|
|
К |
|
|
Σ |
|
|
к ан.вых.01 |
|||
ХСМ,1 |
02 |
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
|
КМ,1 |
03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
X2 |
04 |
|
|
|
|
|
|
|
|
|
К |
|
|
Σ |
|
|
к ан.вых.02 |
|||
ХСМ,2 |
05 |
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
|
КМ,2 |
06 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Рис. 80. Функциональная схема алгоритма АВА(11), АВБ(12) -
аналоговый вывод
Назначение вводов – выходов алгоритмов ДВА(13), ДВБ(14) приведено в табл. 56.
|
|
|
Таблица 56 |
|
Входы алгоритма ДВА и ДВБ |
||
|
|
|
|
Номер |
Обозначение |
Вх-Вых |
Назначение |
01 |
С1 |
Вход |
Вход канала 1 |
02 |
С2 |
“ |
Вход канала 2 |
.... |
..... |
..... |
...... |
m |
Сm |
“ |
Вход канала m |
Алгоритмы ИВА(15), ИВБ(16) импульсный вывод групп А и Б
Алгоритм применяется в тех случаях, когда контроллер дол- жен управлять исполнительным механизмом постоянной скорости.
Алгоритм преобразует сигнал, сформированный алгоблока- ми контроллера (в частности, алгоритм импульсного регулирова-
214
ния), в последовательность импульсов переменной скважности.
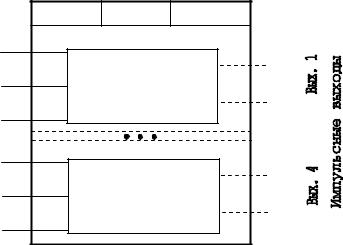
Алгоритм выдает последовательность указанных импульсов на средства дискретного вывода контроллера (ЦДП). Назначение входов выходов алгоритма приведено в табл. 57. Функциональная схема алгоритма приведена на рис.81.
Каждый алгоритм обслуживает до четырех импульсных вы- ходов. Каждый импульсный выход состоит из двух дискретных вы- ходов с общей точкой. Число обслуживаемых выходов m устанав- ливается модификатором алгоритма.
Каждый канал алгоритма ИВА (ИВБ) содержит широтно- импульсный модулятор (ШИМ), преобразующий входной сигнал Х в последовательность импульсов со скважностью Q, пропорцио- нальной входному сигналу: Q=X/100. При Х>100% скважность Q=1. Если X>0, импульсы формируются в выходной цепи “больше”, ес- ли X<0, то в цепи “меньше”. При Х=0 выходной сигнал равен ну- лю.
Параметр Т задает минимальную длительность выходного импульса. Этот параметр устанавливается в диапазоне 0,12≤T≤3,84 сек и округляется до значения, кратного времени цик- ла контроллера.
Параметр N определяет, к какому контуру регулирования от- носится данный канал алгоритма ИВА (ИВБ). Задание этого пара- метра необходимо лишь в том случае, когда требуется, чтобы син-
хронно с формированием выходных импульсов на лицевой панели контроллера зажигались ламповые индикаторы “больше”, “мень- ше”. Например, если установлен параметр N1=1, то при работе ШИМ1 на лицевой панели будут зажигаться индикаторы при вызо- ве 1-го контура.
Масштаб времени отсутствуют.
|
|
|
Таблица 57 |
|
Входы алгоритма ИВА и ИВБ |
||
|
|
|
|
Номер |
Обозначение |
Вх-Вых |
Назначение |
01 |
Х1 |
Вход |
Сигнал 1-го входа |
02 |
Т1 |
“ |
Мин. длительность импульса 1-го выхода |
03 |
N1 |
“ |
Номер контура, с которым связан 1-ый выход |
04 |
Х2 |
“ |
Сигнал 2-го входа |
05 |
Т2 |
“ |
Мин. длительность импульса 2-го выхода |
06 |
N1 |
“ |
Номер контура, с которым связан 2-ой выход |
... |
.... |
“ |
....... |
3m-2 |
Х2 |
“ |
Сигнал i-го входа |
3m-1 |
Т2 |
“ |
Мин. длительность импульса i-го выхода |
215
|
Код15(16) m = 00 - 04 МВ - отсутств |
|
|
X1 |
01 |
|
больше |
|
|
Широтно − импульсный |
|
Т1 |
02 |
меньше |
|
N1 |
|
модулятор1 |
|
03 |
|
|
|
X4 |
10 |
|
больше |
|
|
Широтно − импульсный |
|
Т4 |
11 |
меньше |
|
N4 12 |
модулятор 2 |
||
|
|
||
Рис. 81. Функциональная схема алгоритма ИВА(15), ИВБ(16) -
импульсный вывод
3. Техническая структура системы автоматического регулирования
Техническая структура САР включает (см. рис. 82):
1). Лабораторную электрическую печь сопротивления; 2). Хромель-алюмелевую термопару - датчик температуры в печи; 3). Блок БУТ-20 гр. ХА; 4). Клемно блочный соединитель КБС-21;
5). Клемно блочный соединитель КБС-23 с нормирующими ре- зисторами;
6). Блок контролера регулирующей модели комплектности 12,
который включает в себя УСО группы А : 8 аналоговых входов, 2 аналоговых выхода.
УСО группы Б : 8 аналоговых входов, 4 дискретных выхода. 7). Клемно блочный соединитель КБС-22; 8). Блок ручного управления БРУ-32; 9). Пускатель ПБР-2М;
10). Исполнительный механизм постоянной скорости ИМ 2/120;
216
11). Блок питания БП-21, использующийся для питания блока контроллера и внешних цепей;
12). Лабораторный автотрансформатор, ось которого соединена с выходным валом ИМ.
13). Задатчик ЗУ-05;
14). Регистрирующий прибор ДИСК-250.
ЗУ-05 |
|
|
БК (12) |
|
БРУ |
|
|
ПБР |
|
|
|
ИМ- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2/120 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Положение вала % ИМ |
|
|
||||||||
|
|
|
|
|
|
|
|
ТП -ХА |
|
|
|
|
|
|
|
|
||
Диск- |
|
|
БУТ |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
250 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Электрическая |
|
|
|
ЛАТР |
|
|
|||||
|
|
|
|
|
|
|
|
печь |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.82. Схема физической структуры системы
автоматического регулирования температуры нагревательной печи
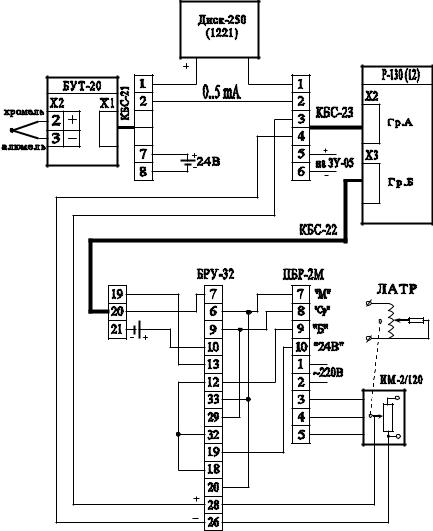
Принципиальная электрическая схема системы автоматиче-
ского регулирования температуры нагревательной печи приведена на рис. 83. Схема конфигурации алгоритмов контроллера Р-130 для реализации функций регулирования и оперативного управле- ния приведена на рис.84.
4. Постановка задачи
Реализовать контур управления температурой нагреватель- ной печи. Самостоятельно заполнить таблицы «Состав конфигу- раций», «Конфигурация алгоритмов» и «Параметры настройки».
Алгоблоки 02-04 заполняются нулевыми алгоритмами имеющими библиотечный номер 00.
Параметры настройки РИМ определить по эксперименталь- но полученной кривой разгона и статической характеристики. В настройке ИВБ указать, что канал относится к первому контуру регулирования. Минимальная длительность импульса для включе- ния ИМ равна 0,12 сек. В настройке алгоритма ОКО указать, что
217
100% входного сигнала соответствует 500 0С. В приборных параметрах контроллера установить комплектность 12.
Рис.83. Электрическая принципиальная схема системы |
автоматического регулирования температуры нагревательной |
печи |
218 |

06-ЗДН24-00-00 07-РИМ21- -00 |
08-РУЧ26 |
09-ИВБ16-01 |
|
01 |
|
|
|
01 |
01 |
|
|
02 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
04 |
|
|
|
02 |
|
|
|
|
|
|
01 |
|
|
|
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
05-ВАА07-03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
01-ОКО 01-06 |
|
|||||
|
tПЕЧИ 01 |
|
|
|
|
|
|
|
|
|
01 |
(х здн) |
|
|
|
||
|
% ИМ 02 |
|
|
|
|
|
|
|
|
|
02 |
(х вн) |
|
|
|
||
|
вн.зад 03 |
|
|
|
|
|
|
|
|
|
|
05 |
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(х ) |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
06 |
(х руч) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
07 |
(х вр) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.84.Схема конфигураций алгоритмов контроллера Р-130
регулирования температуры нагревательной печи
5.Порядок выполнения работы
1.Снять статическую характеристику ОУ для чего:
1.1С помощью БРУ установить вал ИМ на 0% и дождать- ся установления показаний ДИСК-250 после чего записать по- казания;
1.2Повторить п.1.1. для 10%, 20%, и т.д. до 100% вала
ИМ.
1.3Построить статическую характеристику ОУ в коорди- натах % хода вала ИМ - температура печи, 0С.
2.Снять динамическую характеристику ОУ в окрестностях
точки 50% положения вала ИМ для чего:
2.1С помощью БРУ установить ИМ на 50% и дождаться ус- тановления показаний ДИСК-250;
2.2С помощью БРУ изменить положения вала ИМ на 10% и снять кривую разгона записывая показания ДИСК-250 каждые 1530 секунд.
3. Повторить п 2.1. и 2.2. изменяя положения вала ИМ в об- ратную сторону. Также определить время полного хода вала ис- полнительного механизма от начального положения 0% до конеч- ного положения 100%
219
4.Построить кривые разгона в координатах «Время, с» - «Температура печи, 0С».
5.По построенным кривым определить постоянную времени ТОБ и коэффициент передачи объекта КОБ, усреднить значения и
рассчитать настройки регулятора. Задать эти настройки в алго- ритм РИМ. Также задать настройку – время полного хода вала ис- полнительного механизма - ТИМ.
6. Перейти на автоматический режим работы блока контрол- лера, установить задание 250 0С ( с помощью ЗУ-05 или с лицевой панели контроллера) и дождаться окончания переходного процес- са (регистрацию вести по индикатору Контроль лицевой панели БК
врежиме «ВХ»).
7.Изменить задание до 350°С и зафиксировать переходный процесс в системе автоматического регулирования при возмуще-
нии по заданию.
8. В режиме «ВЫХ» с помощью клавиш лицевой панели из-
менить положение выходного вала на 10÷15%, быстро перейти на автоматический режим работы и зафиксировать переходный про- цесс при возмущении по нагрузки.
9. По полученным экспериментальным данным построить графики переходных процессов.
6. Оформление отчета
Отчет по выполненной лабораторной работе должен содер-
жать:
1.Краткое описание используемых алгоритмов оперативного управления и алгоритмов связи с модулями УСО.
2.Структурную, электрическую принципиальную схему САР. Схему конфигурации алгоритмов программы регулирования и опе- ративного управления.
3.Список используемых команд оперативного управления и их реализацию с помощью лицевой панели блока контроллера.
4.Таблицы "Состав конфигураций", "Конфигурирование ал- гоблоков" и "Настройка алгоритмов".
5.Графики переходных процессов.
6.Определение показателей качества переходных процессов.
7.Контрольные вопросы для самостоятельной подготовки
1.Что такое комплектность контроллера? Как формируется код комплектности?
220
2.Какие типы модулей УСО используются в КТС Р-130? Сколько и какого типа сигналов обрабатывается этими модулями?
3.Назначение и общая характеристика блоков БУТ-20 и
БУС-20.
4.Назначение блоков клеммно-блочных соединителей КБС-21, КБС-22, КБС-23 и межблочного соединителя МБС.
5.Задачи, выполняемые регулирующей моделью блока кон- троллера.
6.Команды оперативного управления регулирующей модели блока контроллера.
7.Назначение и работа связных алгоритмов ВАА – ввод ана- логовый группы А и ИВБ – импульсный вывод группы Б.
8.Назначение и работа алгоритмов оперативного управления: ОКО – оперативный контроль, РУЧ – ручное управление, ЗДН –
задание.
ЛАБОРАТОРНАЯ РАБОТА №10
Изучение системы автоматического регулирования температуры нагревательной печи с двухпозиционным регулятором имеющим контакторное исполнительное устройство
Цель работы:
1.Изучить алгоритмы оперативного группового контроля и управления непрерывно-дискретной моделью блока контроллера.
2.Изучить команды группового управления и их реализацию с помощью лицевой панели блока контроллера регулирующей мо-
дели
3.Исследовать переходные процессы в системе автоматиче- ского регулирования температуры нагревательной печи с двухпо- зиционным регулятором.
1.Алгоритмы оперативного группового непрерывнодискретного контроля и управления
Алгоритмы оперативного группового непрерывно- дискретного контроля и управления содержаться только в библио- теке алгоритмов непрерывно-дискретной модели блока контрол- лера.
Эта модель может выполнять как задачи автоматического регулирования, так и задачи логического управления. При выпол-
221
нении задач автоматического регулирования оператор может вес- ти управление до 45 различных входных или выходных сигналов, как дискретных, так и аналоговых. При логическом управлении мо- дель формирует шаговую программу управления.
Алгоритм ОКД(03) – оперативный непрерывно-дискретный контроль
Алгоритм ОКД применяется для организации оперативного управления в задачах, в которых используется как непрерывная, так и дискретная обработка сигналов. Алгоритм ОКД применяется в сочетании с алгоритмами группового управления и контроля – ГРА, ГВД, ГДВ, ГРУ и ГРК, а также с алгоритмами порогового (ПОК) и логического (ЛОК) контроля. Алгоритм входит в состав библиотеки лишь непрерывно-дискретной модели контроллера.
Функциональная схема алгоритма содержит три области:
1)область управления шаговой программой;
2)область информационного управления и контроля;
3)область контроля ошибок.
Область управления шаговой программой выполняет функ- цию оперативного логического управления.
Область информационного управления позволяет контроли-
ровать аналоговые и дискретные сигналы и изменять эти сигналы вручную.
Область контроля ошибок позволяет установить, выходят ли контролируемые сигналы за допустимые границы (для аналоговых сигналов), или принимают недопустимое состояние (для дискрет- ных сигналов).
Управление шаговой программой.
Функцию управления шаговой программой алгоритм ОКД выполняет вместе с алгоритмом шаговой программы ШАП. Для
организации управления выход NШ алгоритма ШАП соединяется с входом N алгоритма ОКД. После такого соединения на лицевую
панель выводится оперативная информация о работе шаговой программы и с помощью клавиш лицевой панели можно управлять ходом выполнения шаговой программы.
Управлять шаговой программой можно также с помощью сигналов, поступающих на входы СД, ССТ и ССБР, при этом выпол- няется соответственно пуск, останов и сброс шаговой программы. Эти команды действуют по переднему фронту, причем если управ- ление ведется и от клавиш лицевой панели, и от входов алгорит-
222