

Учебное пособие КТС
.pdfСигнал, поступающий на вход ХВР, при оперативном управ- лении выводится на шкальный индикатор, а также в режиме кон- троля "ВЫХ" - на цифровой индикатор избирательного контроля. Выходной сигнал контролируется в процентах.
На вход Z подаётся любой (по выбору) сигнал, который тре- буется индицировать в процессе оперативного управления. Этот
сигнал контролируется по цифровому индикатору избирательного контроля в позиции Z. Это может быть аналоговый или дискретный сигнал, время (например, время таймера) или число (например, оставшееся число повторений программы при программном регу- лировании). Тип сигнала задаётся числом на настроечном входе Nz в соответствии с табл. 50.
Таблица 50
Типы сигналов, подаваемых на вход Z алгоритма ОКО
NZ |
Тип сигнала |
0 |
Дискретный |
1 |
Время, младший масштаб |
2 |
Время, старший масштаб |
3 |
Скорость, младший масштаб |
4 |
Скорость, старший масштаб |
5 |
Время импульса |
6 |
Масштабный коэффициент |
7 |
Коэффициент пропорциональности |
8 |
Аналоговый |
9 |
Числовой |
Вход NОК (ошибка контура) используется в том случае, когда
необходим контроль выхода одного или нескольких сигналов за допустимый диапазон. Если NОК>0, то на лицевой панели контрол- лера зажигается один из ламповых индикаторов "1-4" в зоне "ошибки" (номер этого индикатора соответствует номеру контура, обслуживаемого данным алгоритмом ОКО).
Обычно вход NОК соединяется с выходом алгоритма порого- вого контроля ПОК. В этом случае по цифровому индикатору изби- рательного контроля в позиции "ОК" (ошибка контура) можно опре- делить номер сигнала (если их несколько ), вышедшего за допус- тимые границы (см. также описание алгоритма ПОК). Если NОК =0, то ламповый индикатор в зоне “ошибка” не горит.
203
Все перечисленные выше входы (от 01 до 10) задают пара- метры оперативного управления как обычного регулятора, так и каскадного регулятора, если он работает в режиме каскадного управления КУ. В последнем случает входы 01÷05 определяют
параметры ведущего регулятора в каскадной схеме, а входы 06÷10 - параметры регулятора в целом. При каскадном регулировании обычно требуется оперативно управлять также и ведомым регуля- тором. Такая необходимость возникает, когда каскадный регулятор переводится в режим локального управления ЛУ. Возможности управления регулятором в локальном режиме определяется сиг- налами, подаваемыми на входы 11÷15 алгоритма ОКО.
Вход Хздл обычно соединяется с основным выходом алго- ритма локального задатчика ЗДЛ. В этом случае сигнал локально-
го задания в режиме ЛУ контролируется по цифровому индикатору
"ЗАДАНИЕ".
Входы Хвх,л и Хε,л задают соответственно сигналы, контро-
лируемые по цифровому индикатору избирательного контроля в позиции "ВХ" и "ε" в режиме локального управления. Назначение
входов W0,Л и W100,Л , такое же, как и входов W0 и W100.
Таким образом, с помощью алгоритма ОКО программируют- ся (назначаются) функции и сигналы оперативного управления контуром регулирования. Алгоритм определяет, какие сигналы бу- дут выведены на индикаторы лицевой панели и в каких техниче- ских единицах (для задания, входа и рассогласования) эти сигналы будут индицироваться.
Назначение входов алгоритма ОКО – оперативный контроль регулирования приведено в табл.51.
Алгоритм РУЧ(26) – ручное управление
Алгоритм предназначен для изменения режимов управления регулятора. С его помощью регулятор переключается в автомати- ческий или ручной режимы работы. В ручном режиме выходной сигнал изменяется вручную.
Алгоритм РУЧ применяется в составе как аналогового, так и
импульсного регулятора и используется в сочетании с алгоритмом ОКО. Алгоритм содержит переключатель режимов работы и узел ручного управления. Переключение цепей ручного и автоматиче- ского режима работы осуществляется с лицевой панели контрол- лера.
204
|
|
|
Таблица 51 |
|
|
Входы алгоритма ОКО |
|
|
|
|
|
№ |
Входы-выходы |
Назначение |
|
|
Обозн. |
Вид |
|
01 |
ХЗДН |
|
Сигнал задания |
02 |
ХВХ |
|
Входной сигнал (регулируемый параметр) |
03 |
W0 |
|
0% в технических единицах |
04 |
W100 |
|
100% в технических единицах |
05 |
Хε |
|
Сигнал рассогласования |
06 |
ХРУЧ |
|
Сигнал ручного управления |
07 |
ХВР |
Входы |
Выходной сигнал регулятора |
08 |
Z |
|
Любой выбранный сигнал |
09 |
NZ |
|
Тип сигнала на входе Z |
10 |
NOK |
|
Ошибка контура |
11 |
ХЗДЛ |
|
Сигнал задания ведомого регулятора в локаль- |
|
|
|
ном режиме |
12 |
ХВХ,Л |
|
Входной сигнал (регулируемый параметр) |
13 |
W0,Л |
|
0% в технических единицах для ведомого регу- |
|
|
|
лятора в локальном режиме |
14 |
W100,Л |
|
100% в технических единицах для ведомого |
|
Хε,Л |
|
регулятора в локальном режиме |
15 |
|
Сигнал рассогласования ведомого регулятора в |
|
|
|
|
локальном режиме |
|
|
|
|
Если на лицевой панели контроллера нажимается клавиша ручного режима, к выходу алгоритма РУЧ подключается узел руч- ного управления. Если в алгоритме ОКО, связанном с данным ал- горитмом РУЧ, задан аналоговый регулятор, то узел ручного управления алгоритма РУЧ работает по принципу “больше” - “меньше”. Если в алгоритме ОКО задан импульсный регулятор, то узел ручного управления формирует константу, определяющую среднюю скорость перемещения исполнительного механизма.
Если на лицевой панели контроллера нажимается клавиша автоматического режима управления, узел ручного управления
отключается и выход Y алгоритма РУЧ соединяется с его входом Х (локальный и каскадный режим) или Хдст (дистанционный режим).
Вход Х в принципе может подключаться к выходу любого ал- гоблока, но в типовом случае он подключается к выходу алгоритма регулирования. Вход Хдст также может подключаться к выходу любого алгоритма. В частности, если он подключается к выходу алгоритма цифрового ввода, то в дистанционном режиме команда управления исполнительным механизмом поступает через интер-
205

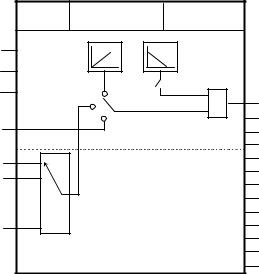
фейсный канал. Функциональная схема алгоритма приведена на рис. 77, назначение входов – выходов алгоритма РУЧ – в табл.52.
|
|
Код 26 |
m - отсутствует |
|
МВ - отсутств |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Узел ручного |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
CРУЧ |
управления |
|
|
|
|
|
|
|
|
|
|
|
|||
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Y(к) |
|||
Х(к) |
|
|
|
|
|
|
|
|
|
|
|||||
02 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
01 |
||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ХДСТ(τ) |
03 |
|
|
|
|
|
|
|
02 |
DРУЧ |
|||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
03 |
DДСТ |
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.77. Функциональная схема алгоритма "РУЧ – ручное управление"
Алгоритм может быть принудительно переключен в ручной режим по дискретной команде на входе СРУЧ. Если сигнал СРУЧ=1, то алгоритм переключается в ручной режим и его перевод в авто- матический режим блокируется. После того, как сигнал СРУЧ сни- мается (т.е. СРУЧ=0) алгоритм остается в ручном режиме, но может быть вручную переведен в автоматический режим.
Помимо основного выхода Y алгоритм содержит два допол- нительных дискретных выхода. Сигнал Dруч=1, если алгоритм на- ходится в положении “РУ” (ручное управление), в противном слу- чае Dруч=0. Сигнал DДСТ=1, если алгоритм находится в положении “ДУ” (дистанционное управление), в противном случае DДСТ=0.
|
|
|
Таблица 52 |
|
Входы-выходы алгоритма РУЧ |
||
|
|
|
|
Номер |
Обозначе- |
Вх-Вых |
Назначение |
|
ние |
|
|
01 |
Cруч |
Вход |
Переход на ручной режим |
02 |
Х |
“ |
Сигнал локального или каскадного |
|
|
|
регулятора |
03 |
Хдст |
“ |
Сигнал дистанционного управления |
01 |
Y |
Выход |
Основной выход (каскадный) |
02 |
Dруч |
“ |
Ручной режим |
03 |
Dдст |
“ |
Дистанционный режим |
206
Алгоритм ЗДН(24)– задание
Алгоритм применяется для формирования сигнала ручного задания в контуре регулирования. Через этот алгоритм к регулято-
ру подключаются также программные задатчики и сигнал внешнего задания. Алгоритм применяется в сочетании с алгоритмом ОКО.
Алгоритм содержит узел ручного задания, узел динамиче- ской балансировки, переключатель вида задания и переключатель программ.
Алгоритм имеет модификатор 0≤m≤40, который определяет число независимых программных задатчиков, подключаемых к ре- гулятору. Если программные задатчики не используются, то устанавливается m=0.
С помощью переключателя вида задания выбирается один из трех видов задания:
ручное задание (“РЗ”): программное задание (“ПЗ”); внешнее задание (“ВЗ”).
Для того, чтобы вид задания можно было изменять с помо- щью клавиш, расположенных на лицевой панели контроллера к выходу YЗДН подключается вход Хздн алгоритма оперативного кон- троля ОКО. Такое подключение позволяет также с помощью кла- виш лицевой панели управлять переключателем программ.
Переключение на программное задание возможно, только если модификатор m>0. Переключение на внешнее задание воз- можно, только если соответствующий режим предусмотрен в алго- ритме ОКО, связанным с данным алгоритмом ЗДН.
В режиме ручного задания сигнал задания изменяется вруч- ную. В режиме программного задания сигнал задания поступает со входов Хпр,i (на этих входах указываются алгоблоки с алгоритма-
ми ПРЗ ¾ “Программный задатчик”). В режиме внешнего задания сигнал задания поступает с входа Хвн. Этот вход может быть под-
ключен к выходу любого алгоблока, в частности ¾ к алгоблоку ввода аналогового или интерфейсного. В этом случае сигнал
внешнего задания поступает соответственно через аналоговый вход контроллера или через интерфейсный канал. Входы-выходы алгоритма ЗДН приведены в табл 53. Функциональная схема алго- ритма ЗДН приведена на рис.78.
Алгоритм ЗДН содержит встроенный механизм статической и динамической балансировки.
207
|
|
|
Таблица 53 |
|
Входы -выходы алгоритма ЗДН |
||
|
|
|
|
Но- |
Обозначе- |
Вх-Вых |
Назначение |
мер |
ние |
|
|
01 |
Ссб |
Вход |
Включение статической балансировки |
02 |
Сдб |
“ |
Включение динамической балансировки |
03 |
Vдб |
“ |
Скорость динамической балансировки |
04 |
Хвн |
“ |
Сигнал внешнего задания (каскадный) |
05 |
Хпр1 |
“ |
Вход для 1-ого программного задатчика |
06 |
Хпр2 |
“ |
Вход для 2-ого программного задатчика |
... |
... |
“ |
..... |
m+4 |
Хпрm |
“ |
Вход для m-го программного задатчика |
01 |
Yздн |
Выход |
Основной выход алгоритма (каскадный) |
02 |
Dруч |
“ |
Режим ручного задания |
03 |
Dвнш |
“ |
Режим внешнего задания |
04 |
Dпрг |
“ |
Режим программного задания |
05 |
Nп |
“ |
Номер текущей программы |
06 |
Nуч |
“ |
Номер текущего участка |
07 |
Tп |
“ |
Время, оставшееся до окончания теку- |
|
|
|
щего участка |
08 |
Dкпв |
“ |
Конец очередного повторения програм- |
|
|
|
мы |
09 |
Nост |
“ |
Оставшееся число повторений |
10 |
Dпс |
“ |
Программа в состоянии “пуск” |
11 |
Dст |
“ |
Программа в состоянии “стоп” |
12 |
Dсбр |
“ |
Программа в состоянии “сброс” |
13 |
Dкп |
“ |
Конец программы |
Статическая балансировка действует только на узел ручного задатчика. Если статическая балансировка не включена (Ссб=0), сигнал, вырабатываемый узлом ручного задатчика, при переклю- чениях режима задания и отключении алгоритма не изменяется. При включенной статической балансировке (Ссб=1) отключенный узел ручного задатчика отслеживает либо текущее задание (в ре- жимах “ПЗ” и “ВЗ”), либо начальное значение, поступающее на выход алгоритма (в отключенном режиме). После включения руч- ного задатчика последнее значение сигнала задания запоминает- ся, но затем это значение может быть изменено вручную.
Если включена динамическая балансировка (Сдб=1), то при
любых переключениях вида задания или отключении алгоритма ЗДН командой обратного счета узел динамической балансировки
208
вырабатывает сигнал компенсации, с помощью которого выходной
сигнал Yздн в первый момент после переключения сохраняется неизменным.
Затем сигнал компенсации уменьшается (по модулю) до ну- ля с постоянной скоростью, задаваемой входом Vдб, при этом вы- ходной сигнал Yздн плавно (безударно) переходит к текущему зна- чению ручного, программного или внешнего задания.
|
Код 24 |
m = 00 − 40 |
МВ = 00,01 |
|
|
||
CСБ |
|
Узел ручного |
|
Узел динамической |
|
|
|
01 |
задатчика |
|
балансировки |
|
|
||
C ДБ |
|
|
|
|
|
|
|
02 |
|
|
|
|
|
|
|
VДБ |
03 |
|
ПЗ |
РЗ |
Σ 01 |
YЗДН (τ) |
|
Х ВН |
|
|
|
D РУЗ |
|||
04 |
|
|
ВЗ |
02 |
D ВНШ |
||
|
|
|
03 |
||||
|
|
|
|
|
D ПРГ |
||
Х ПР ,1 |
05 |
|
|
|
04 |
N П |
|
|
|
|
05 |
||||
Х ПР ,2 |
06 |
|
|
|
06 |
N |
УЧ |
|
|
|
|
|
07 |
Т |
П |
|
|
|
|
|
D КПВ |
||
Х ПР , m m + 4 |
|
|
08 |
NОСТ |
|||
|
|
09 |
DОС |
||||
|
|
|
|
|
10 |
DСT |
|
|
|
|
|
|
11 |
DСБР |
|
|
|
|
|
|
12 |
DКП |
|
|
|
|
|
|
13 |
|
|
Рис.78. Функциональная схема алгоритма ЗДН - задание |
|||||||
Возможен вариант, когда включена как статическая, так и динамическая балансировка (т.е. ССБ=СДБ=1). В этом случае узел
ручного задания работает в соответствии с правилами статической балансировки, а при переключениях на режим программного и внешнего задания, изменении номера программы и включении ал- горитма, работающего в режимах “ПЗ” и “ВЗ”, действует динами- ческая балансировка.
Если входы ССБ и (или) СДБ подключить к алгоблокам, фор- мирующим те или иные дискретные сигналы, то, в зависимости от значений этих сигналов, процедуры балансировки будут автомати- чески включаться и выключаться. Например, можно сделать так,
209
чтобы при переходе в локальный режим включилась динамическая балансировка, в ручном режиме балансировка отсутствовала и т.д.
Помимо основного выхода YЗДН в алгоритме имеется ряд до- полнительных выходов.
Дискретные выходы DРУЗ, DВНШ, DПРГ индицируют установ- ленный вид задания. Если задание ручное, то DРУЗ=1, а
DВНШ=DПРГ=0. Если задание внешнее, DВНШ=1, а DРУЗ=DПРГ=0. Если задание программное, то DПРГ=1, а DРУЗ=DВНШ=0.
Остальные выходы алгоритма ЗДН имеются только в том случае, если задан хотя бы один программный задатчик, т.е. если модификатор алгоритма m>0.
2. Алгоритмы ввода – вывода сигналов
Алгоритмы ввода – вывода сигналов служат для связи аппа- ратуры УСО с программой контроллера – ввода и вывода аналого- вых и дискретных сигналов. К алгоритмам ввода – вывода сигна- лов относятся:
Алгоритмы аналогового ввода для устройства связи с объек- том групп А и Б – ВАА(07) – ввод аналоговый УСО группы А; ВАБ(08) – ввод аналоговый УСО группы Б.
Алгоритмы дискретного ввода для устройства связи с объек- том групп А и Б – ВДА(09) – ввод дискретный УСО группы А; ВДБ(10) – ввод дискретный УСО группы Б.
Алгоритмы аналогового вывода для устройства связи с объ- ектом групп А и Б – АВА(11) – аналоговый вывод УСО группы А; АВБ(12) – аналоговый вывод для УСО группы Б.
Алгоритмы дискретного вывода для устройства связи с объ- ектом групп А и Б – ДВА(13) – дискретный вывод УСО группы А и ДВБ(14) – дискретный вывод УСО группы Б.
Алгоритмы импульсного вывода для устройства связи с объ- ектом групп А и Б – ИВА(15) – импульсный вывод УСО группы А; ИВБ(16) – импульсный вывод УСО группы Б.
Алгоритм аварийного вывода АВР(17) – аварийный вывод. Рассмотрим некоторые из алгоритмов ввода вывода.
Алгоритмы ВАА(07), ВАБ(08) ввод аналоговый группы А и Б
Алгоритмы применяются для связи функциональных алго- ритмов с аппаратными средствами аналогового входа – аналого- цифровым преобразователем (АЦП). Для связи с аналоговыми
входами группы А и Б используются соответственно алгоритмы
210
ВАА и ВАБ. Каждый алгоритм обслуживает до 8 аналоговых вхо- дов.
Помимо связи с АЦП алгоритмы ВАА и ВАБ позволяют кор- ректировать диапазон входного аналогового сигнала в двух точках, соответствующих 0 и 100 % диапазона.
Алгоритм содержит несколько независимых идентичных ка- налов. Число каналов 0<=m<=8 и задается модификатором. Каж- дый канал связан с соответствующим (номеру) аналоговым входом контроллера. Эта связь образуется, как только алгоритм ВАА и ВАБ вводится в один из алгоблоков контроллера. К входному ана- логовому сигналу добавляется сигнал смещения XСМ, полученная сумма умножается на коэффициент КМ. Эти операции позволяют компенсировать смещение нуля и диапазона, как АЦП, так и дат- чика, подключенного к контроллеру.
Выходной сигнал канала равен:
Yi = (Xi + XСМ.,i )× KM,i ,
где Xi – аналоговый входной сигнал, поступающий от АЦП на i-ый канал.
Если коррекции не требуется, устанавливается XСМ,i=0;
KM,i=1. В этом случае Yi=Xi.
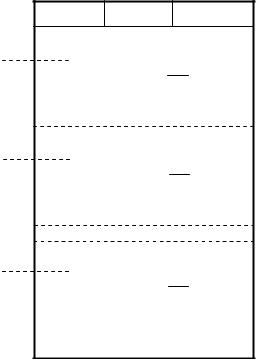
Входы выходы алгоритма приведены в табл.54. Функцио- нальная схема алгоритмов представлена на рис.79.
|
|
|
Таблица 54 |
|
|
Входы – выходы алгоритма ВАА и ВАБ |
|||
|
|
|
|
|
Номер |
Обозна- |
Вх-Вых |
Назначение |
|
|
чение |
|
|
|
01 |
Хсм1 |
“ |
Смещение канала 1 |
|
02 |
Км1 |
“ |
Диапазон канала 1 |
|
03 |
Хсм2 |
“ |
Смещение канала 2 |
|
04 |
Км2 |
“ |
Диапазон канала 2 |
|
.... |
..... |
..... |
...... |
|
2m-1 |
Хсм,m |
“ |
Смещение канала m |
|
2m |
Км,m |
“ |
Диапазон канала m |
|
01 |
Y1 |
Выход |
Выход канала 1 |
|
02 |
Y2 |
“ |
Выход канала 2 |
|
.... |
..... |
..... |
...... |
|
m |
Ym |
“ |
Выход канала m |
|
211
Алгоритмы АВА(11), АВБ(12) аналоговый вывод групп А и Б
Алгоритм применяется для связи функциональных алгорит- мов с аппаратными средствами аналоговых выходов (с цифро- аналоговым преобразователем ЦАП). Для связи с аналоговыми
выходами группы А и Б используются соответственно алгоритмы АВА и АВБ. Каждый алгоритм обслуживает до 2 аналоговых вы- ходов.
Помимо связи с ЦАП алгоритмы АВА и АВБ позволяют кор- ректировать диапазон выходного аналогового сигнала в двух точ- ках, соответствующих 0 и 100% диапазона.
Код 07(08) m = 00 - 08 МВ - отсутств
от ан.вх.01 |
|
|
|
|
|
|
|
Y1 |
|
|
Σ |
|
|
|
|
01 |
|||
ХСМ,1 |
01 |
|
К |
|
|||||
|
|
|
|
||||||
|
КМ,1 |
02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
от ан.вх.02 |
|
|
|
|
|
|
|
Y2 |
|
|
Σ |
|
|
|
|
02 |
|||
ХСМ,2 |
03 |
|
К |
|
|||||
|
|
|
|
||||||
|
КМ,2 |
04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
от ан.вх.m |
|
|
|
|
|
|
m Y |
||
|
Σ |
|
|
|
|
||||
|
|
|
|
К |
|
||||
ХСМ,m |
2m -1 |
|
|
|
m |
||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
КМ,m |
|
|
|
|
|
|
|
|
|
2m |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Рис. 79. Функциональная схема алгоритма ВАА(07), ВАБ(08) –
ввод аналоговый группы А и Б
212