

Учебное пособие КТС
.pdfЛАБОРАТОРНАЯ РАБОТА №7
Моделирование системы автоматического регулирования с трехпозиционным регулятором
Цель работы:
1.Сформировать контур регулирования с трехпозиционным регулятором с помощью алгоритмов микропроцессорного контрол- лера Р-130.
2.Изучить типы переходных процессов в системе автоматиче- ского регулирования с трехпозиционным регулятором.
1.Основные сведения о работе трехпозиционных регуляторов
Трехпозиционным регулятором называют такой регулятор, выходная величина которого может принимать три установивших- ся значения. Как и двухпозиционные регуляторы, трехпозиционные регуляторы относятся к типу релейных регуляторов, но релейная статическая характеристика имеет так называемую зону нечувст- вительности (рис.66,а) в пределах которой значение выходной ве- личины регулятора принимается нулевым.
|
|
|
ХР |
|
|
|
|
|
|
|
|
UВЫХ |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
UMAX |
|
|
|
|
|
||
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|
|
ε |
||||
|
εМ |
|
|
|
|
ε |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Зона |
|
|
UСР |
|
|
Зона |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ε |
0 |
|
|
нечувствительности |
|
|
|
|
|
|
|
||||||||
|
|
εБ |
|
|
|
ε |
|
|
нечувствительности |
||||||||||
|
|
|
-В |
|
|
|
|
|
|
|
|
UMIN |
|
|
|
ε |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
εМ |
|
εБ |
|||||||
|
|
|
|
|
а) |
|
|
б) |
0 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.66. Статические характеристики трехпозиционного
регулятора с зоной нечувствительности и гистерезисом
На рис.66,а приведена статическая характеристика в прира- щениях от состояния равновесия, а на рис.66,б приведена стати-
ческая характеристика трехпозиционного регулятора в физических единицах. UMIN, UСР, и UМАХ соответственно минимальное, среднее
183
и максимальное значение выходного сигнала трехпозиционного регулятора.
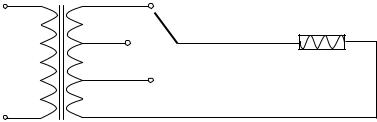
Управление трехпозиционный регулятор осуществляет через трехпозиционное контакторное устройство. Примером такого уст- ройства может служить переключатель, подключающий нагрева-
тель электрической печи к различным секциям вторичной обмотки трансформатора (рис.67).
|
UMАХ |
|
|
|
Эл. печь |
~UС |
UСР |
Переключатель |
|
||
|
|
UMIN |
Рис.67. Электрическая принципиальная схема трехпозиционного
управления температурой электрической нагревательной печи
При подключении к различным секциям вторичной обмотки на нагревательную печь подается различное значение напряже- ния, а следовательно мощность потребляемая электрической пе- чью изменяется, что приводит к изменению температуры.
2. Виды переходных процессов при трехпозиционном регулировании
При трехпозиционном регулировании возможны три разных типа переходных процессов.
1. Если мощность подаваемая на нагреватель при среднем положении переключателя (при UСР) будет равна мощности необ-
ходимой для поддержания температуры нагревателя в заданных пределах то есть, РСР=РНЕОБ при выполнении условия εМ≤ε=ТЗД-ТД≤εБ, то в этом случае после этапа разогрева нагревате- ля, когда на его обмотку подается максимальная мощность РМАХ, наступает этап, когда регулятор на нагреватель печи начинает по-
давать среднюю мощность и после этого никаких переключений в цепи не происходит. Рассогласование может оставаться в переде-
лах εМ ≤ ε ≤ εБ
184
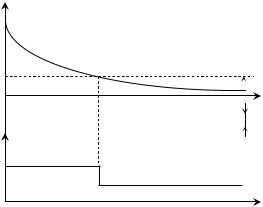
Переходный процесс в этом случае будет неколебательным, вид которого представлен на рис.68.
ε
εБ  ε
ε
0 |
τ |
εМ  ε
ε
Р
РМАХ РСР
τ
Рис.68. Вариант неколебательного переходного процесса при
РСР=РНЕОБ.
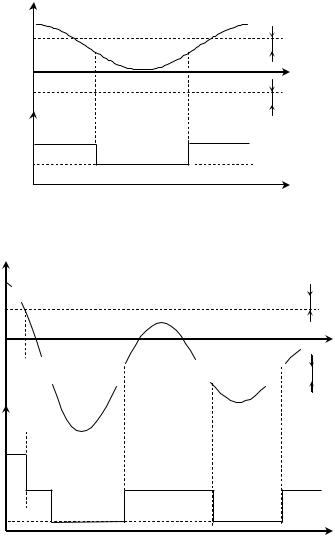
В случае когда средняя мощность подаваемая на нагрева- тель при среднем положении переключателя будет меньше мощ-
ности требуемой для поддержания температуры нагревателя в
заданных пределах (РСР<РНЕОБ), то в этом случае возникает пере- ходный процесс вокруг правой (по рис.66.б) ветви статической ха-
рактеристики регулятора. Вид переходного процесса представлен на рис.69. Переходный процесс при этом будет подобен переход- ному процессу при двухпозиционном регулировании.
Если средняя мощность подаваемая на нагреватель при среднем положении переключателя регулятора будет больше чем мощность требуемая для поддержания температуры нагревателя в заданных пределах, то в этом случае после разогрева нагрева- теля при подаче на него максимальной мощности (РМАХ) возникает переходный процесс вокруг левой ветви статической характери- стики регулятора (см. рис.66,б). Вид переходного процесса представлен на рис.70.
185
ε
εБ |
ε |
0 |
τ |
εМ |
ε |
|
|
РМАХР |
|
РСР |
τ |
|
Рис.69. Вариант колебательного переходного процесса вокруг
правой ветви статической характеристики при РСР<РНЕОБ.
ε
εБ  ε
ε
0
τ
εМ  ε
ε
Р
РМАХ
РСР
РМIN
τ
Рис.70. Вариант колебательного переходного процесса вокруг
левой ветви статической характеристики при РСР>РНЕОБ
186

3. Постановка задачи
Используя разработанную в лабораторной работе №2 мо- дель объекта управления построить модель САР с трехпозицион- ным регулятором, имеющим трехпозиционное исполнительное устройство. Задачу формирования контура трехпозиционного ре-
гулятора решать с помощью алгоритма НОР и алгоритма ПЕР с константами на аналоговых входах Хмах (Umax), Хср (Uср), Хmin (Umin) (см. табл. 46). Разработанная схема должна моделировать работу контактора, подключающего нагреватель печи к различным секциям вторичной обмотки трансформатора. Промежуточное ре- ле в данном случае не моделируется.
4. Формирование контура САР с трехпозиционным регулятором
Контур трехпозиционного регулятора формируется из сле- дующих элементов:
1.элемент контроля за разностью двух сигналов из ограни- ченной справа и слева области допустимых значений;
2.контакторное устройство;
3.объект управления.
Вкачестве элемента контроля за разностью двух сигналов из ограниченной с двух сторон области допустимых значений ис- пользуется алгоритм НОР (нуль-орган). В качестве контакторного
устройства используется алгоритм ПЕР (переключатель с дискрет- ным управлением). Объект управления моделируется последова- тельно включенными алгоритмами ФИЛ (фильтрация), МСШ (мас- штабирование) и ЗАП (запаздывание). Алгоритмы ПЕР, ФИЛ, МСШ и ЗАП описывались в лабораторных работах №2 и №3.
Схема конфигурации алгоритмов САР с трехпозиционным регулятором и контакторным устройством представлена на рис. 71.
01-НОР-60-01 02-ПЕР-57-03 03-ФИЛ-35--00 04-МСШ-55-01 05-ЗАП-39-10-00
Задание |
01 |
01 |
|
02 |
01 |
|
01 |
01 |
|
01 |
01 |
|
01 |
01 |
|
||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
02 |
02 |
|
04 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
03 |
|
06 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 71 Схема конфигураций алгоритмов САР с трехпозиционным
регулятором и контакторным исполнительным устройством
187
По разработанной схеме конфигураций составить таблицы
"Состав конфигураций", "Конфигурирование" и "Настройка".
Алгоритм НОР(60) -нуль-орган
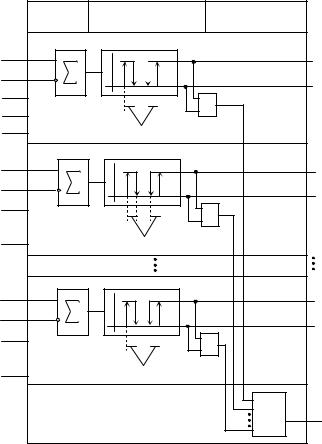
Алгоритм нуль-орган (НОР) используется для контроля за
выходом сигнала или разности двух сигналов из ограниченной слева и справа области допустимых значений. Каждый алгоритм может содержать несколько (до 10) независимых нуль- органов.
Алгоритм содержит m независимых ячеек, причем 0£m£10 и задается модификатором (рис. 72).
Каждая ячейка содержит звено сумматора и звено нуль- ор- гана. Звено сумматора выделяет разность двух сигналов Z=X1-X2
Разностный сигнал подается на звено нуль- органа, имею- щее два порога срабатывания ХБ и ХМ. Нуль-орган срабатывает,
когда Z³ХБ или Z£ХМ, при этом появляется дискретный сигнал со- ответственно на выходе D1 или D2. Оба пороговых элемента имеют одинаковый гистерезис.
Логика работы каждой ячейки нуль- органа описывается таб- лицей 44.
На настроечных входах ХБ, ХМ, Х задаются пороги срабаты- вания и гистерезис нуль- органа. Значение Х <0 воспринимается алгоритмом как Х =0. Выход D0 алгоритма является объединением по ИЛИ выходов всех нуль- органов.
Алгоритм не имеет каскадных входов и выходов и блокирует процедуру обратного счета.
Назначение входов – выходов алгоритма приведено в табл. 45. Функциональная схема алгоритма НОР (нуль- орган) при- ведена на рис.72.
Таблица 44
Логика работы ячейки алгоритма «НУЛЬОРГАН НОР»
Z |
D1 |
D2 |
Z<XБ-Х |
0 |
* |
Z³ХБ |
1 |
* |
ХБ-Х £Z<ХБ |
D1(i-1) |
* |
Z>XМ+Х |
* |
0 |
Z£ХМ |
* |
1 |
ХМ+Х ³Z>ХБ |
* |
D2(i-1) |
188
* - выходной сигнал не зависит от данного условия, D(i-1) – предыдущее значение выходного сигнала.
5.Порядок выполнения работы
1.После включения контроллера перейти в режим «програм- мирование» и произвести обнуление. Выполнить процедуры уста- новки, конфигурации и настройки алгоритмов;
2.Установить настройки трехпозиционного регулятора:
ХБ=3%, ХМ=-3%, Х =0,5%. Для получения всех трех видов пере- ходных процессов в САР настройки алгоритма «ПЕР» и задания для алгоритма «НОР» выбрать из табл. 46 по номеру варианта;
3.Перейти в режим «работа» и зафиксировать изменение во времени выходной величины объекта управления;
4.Для получения переходного процесса с другими настройка- ми перейти в режим «программирование», в процедуре «НАСТР»
установить новые настройки алгоритмов «НОР» и «ПЕР», в проце- дуре «Н.УСЛ» установить на выходе алгоритма «ФИЛ» значение выходного сигнала равного нулю и снять новый переходный про- цесс (см. п.3);
5.По полученным траекториям определить изменение управ- ляющего воздействия во времени;
6.Построить на одном графике изменение величины рассо-
гласования ε=ХЗ-ХД и изменение управляющего воздействия во времени, причем масштаб по оси ординат выбрать таким, чтобы одна клетка тетради соответствовала 1-1,5% значения выходного сигналы;
7. Для колебательных режимов рассчитать период и амплиту- ду колебаний и сравнить с экспериментально полученными значе- ниями. Расчет амплитуды и периода колебаний произвести по формуле лаб. работы №6, причем для колебательного переходно- го процесса происходящего вокруг правой ветви статической ха- рактеристики принять В1=UMAX, В2=UСР, а для колебательного пе- реходного процесса происходящего вокруг левой ветви статиче- ской характеристики принять В1=UСР, В2=UМИН;
8. Сделать выводы по работе.
189
|
|
|
|
Таблица 45 |
|
|
Входы-выходы алгоритма НОР |
||
|
|
|
|
|
|
ВХОДЫ-ВЫХОДЫ |
Назначение |
||
№ |
|
Обозначе- |
Вид |
|
|
|
ние. |
|
|
01 |
|
X1,1 |
|
Первый вход первой ячейки |
02 |
|
X2,1 |
|
Второй вход первой ячейки |
03 |
|
Xб,1 |
|
Первый порог первой ячейки |
04 |
|
Xм,1 |
|
Второй порог первой ячейки |
05 |
|
X ,1 |
|
Гистерезис первой ячейки |
06 |
|
X1,2 |
|
Первый вход второй ячейки |
07 |
|
X2,2 |
Входы |
Второй вход второй ячейки |
08 |
|
Xб,2 |
|
Первый порог второй ячейки |
09 |
|
Xм,2 |
|
Второй порог второй ячейки |
10 |
|
X ,2 |
|
Гистерезис второй ячейки |
. |
|
. |
|
. |
. |
|
. |
|
. |
. |
|
. |
|
. |
5m-4 |
|
X1,m |
|
Первый вход m-ой ячейки |
5m-3 |
|
X2,m |
|
Второй вход m-ой ячейки |
5m-2 |
|
Xб,m |
|
Первый порог m-ой ячейки |
5m-1 |
|
Xм,m |
|
Второй порог m-ой ячейки |
5m |
|
X ,m |
|
Гистерезис m-ой ячейки |
|
|
|
|
|
01 |
|
D1,1 |
|
Первый выход первой ячейки |
02 |
|
D2,1 |
|
Второй выход первой ячейки |
03 |
|
D1,2 |
|
Первый выход второй ячейки |
04 |
|
D2,2 |
|
Второй выход второй ячейки |
. |
|
. |
Выходы |
. |
. |
|
. |
. |
|
. |
|
. |
|
. |
2m-1 |
|
D1,m |
|
Первый выход m-ой ячейки |
2m |
|
D2,m |
|
Второй выход m-ой ячейки |
2m+1 |
|
D0 |
|
Групповой выход |
190
|
Код 60 |
m=00-10 |
MB-отсутствует |
|
|
Х1.1 |
01 |
Z |
|
01 |
D1.1 |
Х2.1 |
02 |
|
|
|
|
|
|
02 |
D2.1 |
||
ХБ.1 |
|
|
|
||
03 |
|
|
1 |
|
|
ХМ.1 |
|
|
|
||
04 |
XМ |
XБ |
|
||
|
|
||||
Х .1 |
05 |
|
X |
|
|
|
|
|
|
||
Х1.2 |
06 |
Z |
|
03 |
D1.2 |
Х2.2 |
07 |
|
|
|
|
|
|
04 |
D2.2 |
||
ХБ.2 |
|
|
|
||
08 |
|
|
1 |
|
|
|
|
|
|
||
ХМ.2 09 |
XМ |
XБ |
|
||
|
|
||||
Х .2 |
10 |
|
X |
|
|
|
|
|
|
||
Х1.m |
5m-4 |
Z |
|
2m-1 D1.m |
|
Х2.m |
5m-3 |
|
|
|
|
|
|
2m |
D2.m |
||
|
|
|
|
||
ХБ. |
5m-2 |
|
|
1 |
|
ХМ.m |
5m-1 |
XМ |
XБ |
|
|
|
|
||||
Х .m |
5m |
|
X |
|
|
|
|
|
|
1 |
D0 |
|
|
|
|
2m+1 |
|
Рис.72. Функциональная схема алгоритма «Нуль- орган НОР» |
|||||
191
|
|
|
|
|
|
Таблица 46 |
|
|
Настроечные параметры для получения трех видов |
||||||
|
|
|
переходных процессов |
|
|
||
вар |
|
|
Величина |
Макс. вы- |
Средн. |
Мин. вы- |
|
|
Переходный |
ход. зна- |
выход. |
ход. зна- |
|
||
№ |
|
процесс |
задания |
чение |
значение |
чение |
|
|
ХЗ,% |
|
|||||
|
|
UMAX,% |
UСР, % |
UMIN,, % |
|
||
|
|
|
|
|
|||
|
|
1 |
38 |
50 |
40 |
1 |
|
1 |
|
2 |
50 |
90 |
30 |
1 |
|
|
|
3 |
15 |
55 |
35 |
5 |
|
|
|
1 |
42 |
55 |
40 |
1 |
|
2 |
|
2 |
55 |
90 |
40 |
1 |
|
|
|
3 |
20 |
55 |
35 |
10 |
|
|
|
1 |
46 |
65 |
45 |
1 |
|
3 |
|
2 |
60 |
90 |
40 |
1 |
|
|
|
3 |
25 |
60 |
40 |
10 |
|
|
|
1 |
48 |
65 |
50 |
5 |
|
4 |
|
2 |
65 |
90 |
40 |
5 |
|
|
3 |
30 |
60 |
45 |
15 |
|
|
|
|
|
|||||
|
|
1 |
52 |
70 |
50 |
10 |
|
5 |
|
2 |
70 |
90 |
50 |
10 |
|
|
3 |
35 |
60 |
50 |
10 |
|
|
|
|
|
|||||
|
|
1 |
28 |
40 |
30 |
5 |
|
6 |
|
2 |
75 |
90 |
50 |
5 |
|
|
3 |
40 |
60 |
50 |
20 |
|
|
|
|
|
|||||
|
|
1 |
41 |
65 |
40 |
5 |
|
7 |
|
2 |
55 |
80 |
30 |
5 |
|
|
3 |
25 |
50 |
35 |
5 |
|
|
|
|
|
|||||
|
|
1 |
39 |
65 |
40 |
5 |
|
8 |
|
2 |
80 |
80 |
40 |
5 |
|
|
3 |
45 |
60 |
50 |
20 |
|
|
|
|
|
|||||
|
|
1 |
56 |
80 |
55 |
1 |
|
9 |
|
2 |
65 |
85 |
50 |
1 |
|
|
3 |
20 |
50 |
30 |
5 |
|
|
|
|
|
|||||
|
|
1 |
34 |
70 |
35 |
1 |
|
10 |
|
2 |
50 |
70 |
30 |
1 |
|
|
3 |
15 |
40 |
25 |
5 |
|
|
|
|
|
|||||
|
|
1 |
44 |
70 |
50 |
1 |
|
11 |
|
2 |
55 |
75 |
35 |
5 |
|
|
3 |
30 |
60 |
40 |
15 |
|
|
|
|
|
|||||
|
|
1 |
36 |
70 |
35 |
5 |
|
12 |
|
2 |
60 |
80 |
50 |
5 |
|
|
|
3 |
35 |
60 |
50 |
20 |
|
192