

Учебное пособие КТС
.pdfW (P ) = K ОБ × e − τОБ Р ,
Т ОБ Р + 1
где КОБ, ТОБ, τОБ – коэффициент передачи, постоянная времени и время запаздывания объекта соответственно.
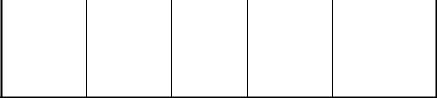
Данную передаточную функцию можно представить в виде последовательного соединения следующих элементарных звеньев
(см. рис. 35).
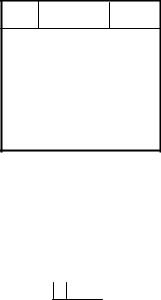
Схема конфигурации алгоритмов для моделирования объек- та управления может иметь вид, представленный на рис.36.
|
1 |
|
|
KОБ |
|
e−τОБР |
|
ТОБР +1 |
|
|
|||
|
|
|
|
|
||
Рис.35. Структурная схема модели объекта управления
В схеме конфигураций над прямоугольником, обозначающим алгоритм, сначала указывается номер алгоблока, в который поме- щается данный алгоритм, затем через тире буквенное обозначе- ние и код алгоритма, а далее через тире модификатор и масштаб времени. Если у алгоритма отсутствует модификатор или масштаб времени, то в этой позиции ставится пропуск.
01− ФИЛ35 − −00 |
02 − МСШ55 − 01 |
03 − ЗАП39 −10 − 00 |
||||||||
|
01 |
01 |
|
01 |
01 |
|
|
01 |
01 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Рис.36. Схема конфигурации алгоритмов для моделирования
объекта управления
Необходимо отметить, что модификатор конкретизирует ка- кие-либо свойства алгоритма или указывает число однотипных операций выполняемых алгоритмом. Масштаб времени кодируется цифрами «00» и «01». Если контроллер в целом настроен на младший временной диапазон, то с помощью масштаба времени
индивидуально для конкретного алгоритма можно выбрать либо секундный масштаб времени (код «00»), либо минутный масштаб (код «01»). Если же контроллер настроен на старший временной диапазон, то задав для алгоритма масштаб времени кодом «00», выбирается минутный масштаб времени, кодом «01» - часовой
133
масштаб времени. После обнуления контроллер автоматически настраивается на младший временной диапазон.
Для алгоритмов, используемых в схеме конфигураций, биб- лиотечные номера, значение их модификаторов и масштаб време- ни указываются в таблице конфигураций алгоритмов , табл.34.
Таблица 34
Состав конфигураций
Номер |
Код |
Название |
Модификатор |
|
Масштаб |
|
алгоблока |
алгоритма |
алгоритма |
|
времени |
||
|
|
|||||
01 |
35 |
ФИЛ |
- |
|
00 |
|
02 |
55 |
МСШ |
01 |
|
- |
|
03 |
39 |
ЗАП |
10 |
|
00 |
|
Связи |
между алгоритмами сведены в таблицу «Конфигури- |
|||||
рование алгоблоков», табл.35. |
|
Таблица 35 |
||||
|
Конфигурирование алгоблоков |
|||||
|
|
|
||||
|
|
|
|
|
|
|
Номер |
Номер |
|
Номер |
|
Номер |
|
входа |
|
|
выхода |
|||
алгоблока |
"инверсия" |
алгоблока |
|
|||
алгоблока |
алгоблока |
|||||
приемника |
|
источника |
||||
приемника |
|
источника |
||||
|
|
|
||||
02 |
01 |
т.п. |
01 |
01 |
||
03 |
01 |
т.п. |
02 |
01 |
||
Обозначение «т.п.» в поле инверсия обозначает отсутствие инверсии на входе алгоблока (темное поле), в случае инверсии в этом поле указывается знак «-».
Численные значение входных сигналов и параметров на- стройки сводятся в таблицу «Настройка алгоритмов», табл.36.
Таблица 36
Настройка алгоритмов
Номер |
Название |
Номер |
Название |
Численное |
|
алгоблока |
настроечного |
параметра |
|||
алгоритма |
значение |
||||
|
входа |
настройки |
|||
|
|
|
|||
|
|
|
|
|
|
01 |
ФИЛ |
02 |
Постоянная вре- |
* |
|
мени объекта |
|||||
|
|
|
|
||
02 |
МСШ |
02 |
Коэффициент |
* |
|
передачи объек- |
|||||
|
|
|
та |
|
|
03 |
ЗАП |
05 |
Период отсчета |
* |
|
(τОБ/m) |
|||||
|
|
|
|
134
*- численное значение задается преподавателем для каждого ва- рианта или согласно табл.37.
3.Порядок выполнения лабораторной работы
1.Включить установку.
2.Включить пульт настройки переведя выключатель пульта расположенный с обратной стороны пульта настройки в положение
"Вкл".
3.Перейти в режим программирования путем одновременно-
го нажатия клавиш ↓ + → и обнулить контроллер.
4.Выполнить процедуры: "Алгоблоки", "Конфигурирование"
и"Настройка", используя заполненные заранее таблицы 34,35 и
36. Данные по настроечным коэффициентам получить у препода- вателя. Табличные данные заносить в оперативную память по- строчно. Вызов каждого параметра производится нажатием кла- виши - ПН-21. Изменение параметра производится с помощью клавиш D и Ñ (соответственно увеличение и уменьшение вводимо- го параметра), последнее нажатие клавиши - для каждого пара- метра – запись в оперативную память.
5.В процедуре «НАСТР» установить на входе 01 алгоблока 01 установить входное воздействие 10%.
6.Перевести контроллер в режим «работа», нажав одновре-
менно клавиши «↓» + «←». Ламповый индикатор «работа» должен загореться мигающим светом.
7.После этого как можно быстрее (от этого зависит, насколько точно будет зарегистрирован начальный участок кривой разгона) перейти в режим контроля сигнала на выходе 01 алгоблока 03 и фиксировать выходной сигнал через каждые 10с.
8.Построить экспериментальную кривую разгона, полученную
вэксперименте, и сравнить с теоретической, которую необходимо построить на том же графике. Оценить точность моделирования.
9.По экспериментальной кривой разгона определить пара- метры моделируемого объекта управления.
Примечание. Теоретическую кривую разгона можно полу-
чить путем решения аналитического уравнения:
Y(t)= K |
|
æ |
æ |
|
t - t |
З |
öö |
ОБ × |
ç |
ç |
- |
|
÷÷ |
||
ç1 |
- eхрç |
ТОБ |
÷÷, |
||||
|
|
è |
è |
|
øø |
||
при (t - tЗ )< 0 |
Y(t)= 0 |
|
|
|
|
||
135
4. Оформление отчета
Отчет по выполненной лабораторной работе должен содер-
жать:
1.Описание алгоритмов ФИЛ и ЗАП библиотеки алгоритмов динамических преобразований.
2.Схему конфигураций алгоритмов, таблицы «Состав конфи- гураций», «Конфигурирование алгоблоков» и «Настройка алгорит- мов»
3.Порядок программирования контроллера.
4.Таблицу полученных результатов.
5.График полученной экспериментальной и расчетной кривой разгона. Определение динамических параметров моделируемого объекта.
6.Вывод по работе.
|
|
|
|
Таблица 37 |
|
|
|
Варианты задания |
|
|
|
|
|
|
|
|
|
Вариант |
ТОБ |
|
коэффициент, КОБ |
запаздывания, τОБ |
|
|
Постоянная |
|
Масштабный |
Время |
|
|
времени объекта, |
|
|||
|
|
|
|
||
|
|
|
|
|
|
1 |
45 |
|
2,4 |
1 |
|
2 |
50 |
|
3,1 |
2 |
|
3 |
55 |
|
1,5 |
3 |
|
4 |
60 |
|
1,9 |
4 |
|
5 |
65 |
|
1,6 |
5 |
|
6 |
70 |
|
2,1 |
1 |
|
7 |
75 |
|
2,3 |
2 |
|
8 |
80 |
|
3,2 |
3 |
|
9 |
45 |
|
2,8 |
4 |
|
10 |
50 |
|
2,9 |
5 |
|
11 |
55 |
|
1,8 |
1 |
|
12 |
60 |
|
1,7 |
2 |
|
13 |
65 |
|
1,2 |
3 |
|
14 |
70 |
|
2,5 |
4 |
|
15 |
75 |
|
2,2 |
5 |
|
5. Задание для самостоятельной работы
Изучите другие алгоритмы динамических преобразований [1]. Составьте примеры функций, для реализации которых могут ис- пользоваться эти алгоритмы. Поясните составленные примеры.
136
6.Контрольные вопросы для самостоятельной подготовки
1.Какие модули входят в состав КТС Ремиконт Р-130?
2.Какие типы сигналов обрабатываются алгоритмами кон- троллера?
3.Что такое виртуальная структура контроллера и её отли- чие от физической структуры?
4.Что входит в виртуальную структуру контроллера?
5.Объясните понятие цикличности обработки алгоблоков.
6.Назначение и работа с пультом настройки.
7.Типы и назначение моделей блока контроллера.
ЛАБОРАТОРНАЯ РАБОТА №3
Изучение алгоритмов аналого-дискретных преобразований на примере моделирования цепи управления исполнительным механизмом постоянной скорости
Цель работы:
1.Изучение алгоритмов аналого-дискретных преобразований.
2.Моделирование цепи управления исполнительным механиз- мом постоянной скорости.
3.Определение средней скорости перемещение регулирующе- го органа.
1.Алгоритмы аналого-дискретных преобразований
Алгоритмы аналого-дискретного преобразования позволяют дискретно управлять аналоговыми сигналами, поступающими на их входы, или производить преобразование аналоговых сигналов в дискретные и наоборот.
В группу алгоритмов аналого-дискретных преобразований входят следующие алгоритмы:
1.ПЕР (57) - Переключатель с дискретным управлением
2.ПЕН (58) - Переключение по номеру
3.ПОР (59) - Пороговый элемент
4.НОР (60) - Нуль-орган
5.ИМП (61) - Импульсатор
6.ЗАИ (62) - Запрет изменения
7.ЗАЗ (63) - Запрет знака
8.СЛЗ (64) - Слежение-запоминание
9.ЗПМ (65) - Запоминание
10.БОС (66) - Блокировка обратного счета
11.ВОТ (67) - Выделение отключения
137
Рассмотрим некоторые алгоритмы аналого-дискретных пре- образований боле подробно.
Алгоритм ИМП (61) - импульсатор
Алгоритм используется для периодического включения и вы- ключения нагрузки в том случае, когда скважность включения
должна быть пропорциональная непрерывному управляющему сигналу.
Код 61 m − отсутств МВ − 00;01
|
|
Х 01 |
|
|
|
|
|
01 |
DБ |
|
|
|
|
|
|
|
|||||||
Т |
|
|
|
|
|
|
|
02 |
DМ |
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
ПЕР |
02 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
Рис.37. Функциональная схема алгоритма "Импульсатор ИМП"
Алгоритм содержит широтно-импульсный моду- лятор (ШИМ) с заданным
периодом и меняющейся длительностью включения. Функциональная схема ал-
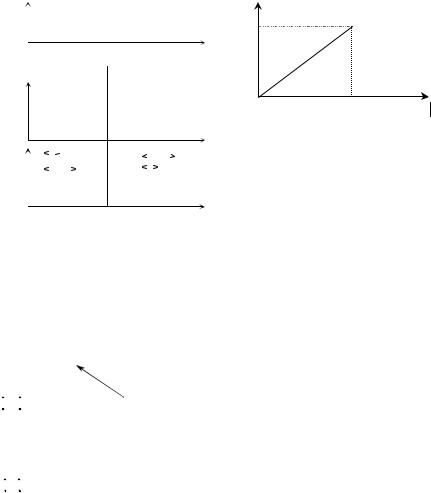
горитма приведена на рис. 37. Статическая харак- теристика и диаграмма фор-
мируемых импульсов импульсатора представлены на рис.38 и 39 соответст- венно.
Период следования импульсов задается сигналом на на- строечном входе ТПЕР алгоритма. Длительность выходных импуль- сов:
tИМП = Х ×ТПЕР .
100
Если Х=0, то tИМП=0, если |Х|>100%, то tИМП=ТПЕР (то есть пауза отсутствует). Если вычисленное значение tИМП<ТЦ, где ТЦ –
время цикла контроллера, то реализуемое значение tИМП=ТЦ, при- чем часть импульсов при этом пропадает. Если установленное значение периода ТПЕР<ТЦ, то реализуемое значение tИМП=0 (то есть импульсы не формируются).
138
Х |
|
|
|
|
|
|
Х > 0 |
|
|
|
|
|
|
γ = tИМП / ТПЕР |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Х < 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
DБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
D=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
100 |
|
Х |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D=0 |
|
|
|
|
|
|
|
|
|
|
|
|
Рис.38. Статическая характе- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ристика импульсатора |
|||
DМ |
|
tИМ |
П |
|
|
|
|
|
|
ТПЕР |
|
|
|
τ |
|||||
|
ТПЕР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
D=1 |
|
t |
ИМП |
|
|
|
Рис.39. Диаграмма выходных |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
D=0 |
|
|
|
|
|
|
|
сигналов импульсатора |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Алгоритм ПЕР (57) – переключатель с дискретным управлением
|
|
Код 57 |
m = 00 − 49 |
МВ − отсутствует |
|
|
||
X1 |
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|||
|
X2 |
03 |
|
|
|
01 |
Y |
|
Xm |
2m −1 |
|
|
|||||
|
|
|
|
|
||||
|
C1 |
02 |
|
|
|
|
N |
|
|
|
|
|
|||||
|
C2 |
|
|
02 |
||||
|
|
04 |
|
|
|
|
||
|
Cm |
|
|
|
|
|||
|
2m |
|
|
|
|
|||
|
|
|
|
|
|
|||
Рис.40. Функциональная схема алгоритма "ПЕР - переключатель"
Алгоритм представляет собой многополюсный пере- ключатель аналоговых сиг- налов, положение которого
определяется дискретными сигналами, поступающими на вход алгоритма. Алгоритм используется для выбора од- ного из нескольких (до 49) сигналов. Если на аналого- вых входах алгоритма зада- ны константы, то алгоритм
может использоваться для дискретной установки тре- буемой константы. Функцио-
нальная схема алгоритма приведена на рис. 40.
139
Если на всех дискретных входах Сi, управляющих положением переключателя, сигнал отсутствует (лог."0"), выходной сигнал Y=0. Если на какой-либо из дискретных входов подается дискретный
сигнал Сi=1, выход алгоритма Y подключается к одноименному аналоговому входу Хi.
Если дискретные сигналы подаются на несколько входов, приоритетен вход с младшим номером.
Сигнал на выходе Y равен сигналу на выбранном входе. Чис- ло на выходе N указывает номер выбранного входа. Число пере- ключаемых входов задается модификатором. Работа алгоритма переключателя представлена в табл.38.
|
|
|
|
|
|
Таблица 38 |
|
|
Работа алгоритма ПЕР - переключатель |
||||
|
|
|
|
|
||
|
Дискретные входы |
|
|
Выходы |
||
С1 |
С2 |
С3 |
… |
Сm |
Y |
N |
0 |
0 |
0 |
… |
0 |
0 |
0 |
1 |
* |
* |
… |
* |
Х1 |
1 |
0 |
1 |
* |
… |
* |
Х2 |
2 |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
0 |
0 |
0 |
… |
1 |
Хm |
m |
* - значение сигнала безразлично.
Алгоритм ОГР (48) – ограничение
Код 48 m - отсутствует МВ - отсутств
Х(к) 01 |
|
|
|
|
|
01 |
Y(к) |
|||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ХВ |
02 |
|
|
|
|
|
02 |
DВ |
||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
DН |
||
|
|
|
|
|
|
|
|
|
|
|||
ХН |
03 |
03 |
||||||||||
|
|
|
|
|
|
|
|
|
||||
Рис.41. Функциональная схема алгоритма "ОГР – Ограничение"
Алгоритм используется для ограничения верхней и (или) нижней границы диапазона изменения сиг- нала.
На двух дискретных выходах DВ, DН фиксиру-
ются достижение сигналом верхней и нижней границы ограничения. Уровни огра- ничений задаются настро- ечными входами ХВ и ХН.
Алгоритм будет правильно работать, ХВ>ХН.
139
Если на каскадный выход Y(к) поступит команда отключения со значением начальных условий Y0 или команда запрета, эти сиг-
налы транслируются предвключенному алгоритму через каскадный вход Х(к). Входы-выходы алгоритма ОГР приведены в табл.39, его функциональная схема приведена на рис.41.
|
|
|
|
|
Таблица 39 |
|
|
|
Входы –выхода алгоритма ОГР |
||
|
|
|
|
|
|
|
Входы – выходы |
Наименование |
|||
|
|
|
|
|
|
01 |
|
Х(к) |
|
|
Вход (каскадный) |
02 |
|
ХВ |
|
Входы |
Верхняя граница ограничения |
03 |
|
ХН |
|
|
Нижняя граница ограничения |
01 |
|
Y(к) |
|
|
Основной выход (каскадный) |
02 |
|
DВ |
|
Выходы |
Достижение верхней границы |
03 |
|
DН |
|
|
Достижение нижней границы |
2. Моделирование цепи управления исполнительным механизмом постоянной скорости
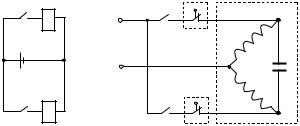
В автоматических системах регулирования широкое приме- нение в качестве исполнительных механизмов (ИМ) находят ИМ с
электродвигателями с постоянной частотой вращения выходного вала. Такие ИМ осуществляют перемещение регулирующего орга- на (РО) с постоянной скоростью, поэтому в литературе их называ- ют исполнительными механизмами постоянной скорости.
"Б" К1 |
K1.1 SA1 |
UZ |
Сеть |
|
С |
"М" К2 |
K2.1 SA2 |
Рис.42. Схема управления ИМ с помощью электромагнитного
пускового устройства
ИМ постоянной скорости может находиться только в трех ос- новных состояниях: перемещение РО с постоянной скоростью S0,
140
неподвижность, перемещение РО в обратную сторону с постоян- ной скоростью. При достижении крайних положений вала срабаты- вают концевые выключатели и ИМ останавливается.
Схема управления ИМ с пусковым устройством показана на рис.42. В качестве пусковых устройств, как правило, используют релейные электромагнитные аппараты.
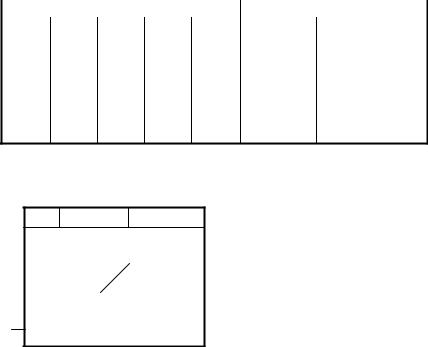
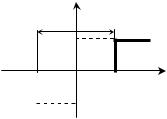
Без учета времени разгона и торможения статическая харак- теристика dμ/dτ = f(Z) такого ИМ в комплекте с его пусковым уст- ройством без зоны возврата имеет вид, представленный на рис.43.
Аналитически статическая характеристика запишется в виде системы:
dμ /dτ
S0
− |
НЧ / 2 |
|
|
|
|
|
|
|
|
Рис.43. Статическая характери- |
|||||||
|
|
НЧ / 2 Z |
|
|
|
|
|||||||||||
|
|
|
|
|
− S0 |
|
|
|
|
|
|
|
|
стика ИМ постоянной скорости |
|||
|
|
|
dμ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
= S0 , при |
Z > |
|
|
НЧ |
, |
|
||||||||
|
|
|
dτ |
2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
dμ |
= 0, |
при |
|
Z |
|
< |
|
|
НЧ |
, |
|
|||
|
|
|
|
|
|||||||||||||
|
|
|
dτ |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
dμ |
= −S0 , при |
|
Z < |
|
|
− |
НЧ |
, |
||||||
|
|
|
dτ |
|
2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где |
|
|
НЧ – зона |
нечувствительности пускового устройства; |
|||||||||||||
dμ/dτ - скорость перемещения РО; Z – сигнал на входе пускового устройства.
Статическая характеристика ИМ постоянной скорости явля- ется существенной нелинейной. Ее нельзя линеаризовать с доста- точной для практических расчетов точностью при различных диа- пазонах изменения входного сигнала Z.
Однако такой ИМ может иметь достаточно близкие к линей- ным характеристики при релейно-импульсном изменении входного сигнала. Если подать на вход ИМ постоянной скорости импульсы напряжения ZН с периодом следования ТПЕР и скважностью:
141