

Учебное пособие КТС
.pdfВ поле Х с помощью клавиш «Ñ», «D» набрать нужное зна- чение параметра настройки и нажать клавишу «-». После этого настроечное значение параметра будет занесено в память кон- троллера, а все поля пульта настройки, кроме N1, погаснут. Далее можно перейти к установке следующего параметра настройки.
4. Порядок перевода контроллера в режим «работа», контроль выходных сигналов и установка значений коэффициентов
Перевод контроллера в режим «работа»
После выполнения действий по программированию контрол- лера осуществляется его включение в режим «работа», в котором производится выполнение программы. Перевод в режим «работа» осуществляется нажатием и кратковременным удержанием комби-
нации клавиш «↓» + «←». О переходе в режим работы свидетель- ствует зажигание ЛИ «работа». Если в режиме «работа» загора- ется индикатор «ОШ» - это свидетельствует об возникновении программной или аппаратной ошибки в работе контроллера. Код (коды) ошибки можно просмотреть в процедуре «ОШ».
Контроль выходных сигналов
Контроль выходного сигнала любого алгоблока осуществля- ется в процедуре «ВЫХ». Для этого производится выполнение следующих действий.
1.Для перехода в режим контроля выходных сигналов алго- ритмов с помощью клавиш «¬» «®» пульта настройки выбрать процедуру «ВЫХ» и ввести её в работу нажатием на клавишу «-». После этого на пульте настройки засветится поле N1. (см. рис.20.вариант 2).
2.В поле N1 с помощью клавиш «Ñ», «D» указать номер ал- гоблока, выходной сигнал которого, необходимо контролировать и
нажать клавишу «-», засветится поле N2.
3. В поле N2 с помощью клавиш «Ñ», «D» указать номер выхо- да алгоблока, на котором необходимо контролировать выходной сигнал и нажать клавишу «-», засветится поле Х, в котором будет индицироваться численной значение выходного сигнала.
123

Изменение параметров настройки алгоритмов
В режиме «работа» параметры настройки можно изменять только на тех настоечных входах, которые установлены как коэф- фициенты. Установка коэффициентов осуществлялась при про- граммировании контроллера в процедуре «КОНФ». Коэффициен-
тами были заданы входы алгоблоков на которые задаются сигналы Х1, Х2, Х3. В остальном изменение параметров настройки в режиме «работа» будет производиться аналогично режиму «программи-
рование».
5.Порядок выполнения лабораторной работы
1.Включить установку.
2.Включить пульт настройки, переведя выключатель пульта
расположенный с обратной стороны пульта настройки в положение
"ВКЛ".
3.Перейти в режим программирования путем одновременного
нажатия клавиш ↓ + → и обнулить контроллер.
4.Выполнить процедуры: "Алгоблоки", "Конфигурирование"
и"Настройка", используя заполненные заранее таблицы 27,28 и
29. Данные по настроечным коэффициентам получить у препода- вателя или из табл. 30. Табличные данные заносить в оператив- ную память построчно. Вызов каждой процедуры производится на- жатием клавиши - ПН-21. Изменение параметра производится с помощью клавиш D и Ñ (соответственно увеличение и уменьшение вводимого параметра), последнее нажатие клавиши - для каждого параметра – запись в оперативную память.
5.Перевести контроллер в режим «работа» и проконтролиро- вать коды ошибок контроллера.
6.Перейти в режим контроля сигнала Y на выходе 01 алго-
ритма 03.
7.В режиме «НАСТР» изменить значение сигналов Х1, Х2, Х3 и проконтролировать выходную величину Y.
8.Повторить пункт 7 для всех заданных значений сигналов Х1,
Х2, Х3.
9.Свести полученные результаты в таблицу следующего ви-
да.
Сигнал Х1, % Сигнал Х2, % Сигнал Х3, % Выходной сигнал Y
124
10.Объяснить полученные результаты.
6.Оформление отчета
Отчет по выполненной лабораторной работе должен содер-
жать:
1.Краткое описание порядка работы с микропроцессорным контроллером в режиме «программирование» и в режиме «рабо- та».
2.Описание алгоритмов СУМ, УМД, КОР, МСШ библиотеки
алгоритмов статических преобразований.
3.Схему конфигураций алгоритмов, таблицы «Состав конфи- гураций», «Конфигурирование алгоблоков» и «Настройка алгорит- мов»
4.Порядок программирования контроллера.
5.Таблицу полученных результатов.
6.Вывод по работе.
|
|
|
|
|
|
|
|
Таблица 30 |
||
|
|
|
Варианты задания |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Вариант |
Сигнал |
Сигнал |
|
Сигнал |
Вариант |
Сигнал |
Сигнал |
|
Сигнал |
|
|
|
|
|
|
||||||
|
Х1, % |
Х2, % |
|
Х3, % |
|
Х1, % |
Х2, % |
|
Х3, % |
|
|
|
|
|
|
|
|
|
|
|
|
|
1,3 |
-14,3 |
|
-6,6 |
|
-12,4 |
7,2 |
|
-7,6 |
|
1 |
-7,4 |
12,1 |
|
1,1 |
5 |
15,2 |
6,3 |
|
-5,9 |
|
-7,9 |
-16,3 |
|
-10,7 |
-11,3 |
-2,8 |
|
8,3 |
|
||
|
2,4 |
-2,3 |
|
-15,9 |
|
7,5 |
6,4 |
|
8,7 |
|
|
-1,6 |
5,3 |
|
1,1 |
|
10,4 |
-2,3 |
|
-4,6 |
|
|
2,4 |
-12,2 |
|
-1,8 |
|
6,5 |
-2,2 |
|
-0,1 |
|
2 |
0,1 |
2,4 |
|
5,9 |
6 |
4,4 |
7,3 |
|
11,3 |
|
11,7 |
-8,7 |
|
0,3 |
15,7 |
3,7 |
|
-0,7 |
|
||
|
-4,4 |
9,3 |
|
8,1 |
|
5,1 |
-9,4 |
|
5,0 |
|
|
-7,9 |
-7,3 |
|
1,9 |
|
-4,6 |
-10,1 |
|
-3,9 |
|
|
5,8 |
-12,9 |
|
8,1 |
|
-7,8 |
5,2 |
|
-3,1 |
|
3 |
2,3 |
-18,6 |
|
1,4 |
7 |
-9,2 |
3,9 |
|
1,3 |
|
14,2 |
13,7 |
|
4,2 |
-10,6 |
3,2 |
|
-5,3 |
|
||
|
-2,0 |
-0,7 |
|
18,0 |
|
3,4 |
1,1 |
|
-2,1 |
|
|
-13,4 |
-9,0 |
|
-1,5 |
|
6,5 |
-6,5 |
|
2,3 |
|
|
5,5 |
-9,3 |
|
-17,2 |
|
-0,9 |
14,1 |
|
-8,3 |
|
4 |
12,9 |
4,8 |
|
2,8 |
8 |
-0,6 |
4,5 |
|
12,4 |
|
-9,1 |
2,7 |
|
-5,2 |
12,8 |
6,3 |
|
-16,3 |
|
||
|
-1,4 |
1,4 |
|
1,8 |
|
7,4 |
-9,5 |
|
-18,7 |
|
|
11,3 |
1,9 |
|
6,9 |
|
-11,9 |
7,6 |
|
13,1 |
|
125
7. Задание для самостоятельной работы
Изучите другие алгоритмы статических преобразований. Со- ставьте примеры функций, для реализации которых могут исполь- зоваться эти алгоритмы. Поясните составленные примеры.
Составьте схемы конфигураций алгоритмов для вычисления следующих функций:
1. Y = X1 × X2 + X3 × X4
3. Y = 
 (X1 + X2 ) X1 + X2
(X1 + X2 ) X1 + X2
X3
5. Y = X1 + X2 X3 + X4
7. Y = X5 ×[(X1 + X2 )- (X3 + X4 )] X3 + X4
9. Y = X1 ×(X2 + X3 + X4 )
11. Y = |
X1 |
+ X2 |
× |
X1 |
+ X2 |
|||
|
|
|
|
|||||
|
X |
3 |
+ X |
4 |
|
X + X |
4 |
|
|
|
|
|
3 |
|
|||
2. Y =10 × |
|
X1 × X2 |
|
X3 |
|
||
|
|
|
4. Y = X1 + X2 X3 × X4
6. Y =10× |
X1 |
|
X3 + |
X1 |
|
X2 |
X2 |
||||
|
|
|
8. Y = 
 ((X1 + X2 ))
((X1 + X2 ))

 X3 + X4
X3 + X4
10. Y = X1 + X2
2× X1 × X2
12. Y = 

 X1
X1

 X2
X2
126
8.Контрольные вопросы для самостоятельной подготовки
1.Дайте понятие алгоритма и алгоблока.
2.Объясните смысл процедур «Алг», «Конф», «Настр».
3.Поясните порядок занесения алгоритмов в алгоблоки.
4.Поясните порядок конфигурирования.
5.Дайте понятия связного и свободного конфигурирования.
6.Поясните отличия между настроечными входами алго- ритма, установленными как константы и как коэффициенты.
7.Поясните порядок настройки алгоритмов.
8.Какие алгоритмы из библиотеки алгоритмов производят
статическую обработку сигналов?
9. Назовите и дайте понятия реквизитов алгоритма.
ЛАБОРАТОРНАЯ РАБОТА №2
Изучение алгоритмов динамических преобразований на примере моделирования объекта управления
Цель работы:
1.Изучить алгоритмы динамических преобразований.
2.Произвести моделирование объекта управления и оценить его динамические характеристики.
1.Алгоритмы динамических преобразований
Вбиблиотеке алгоритмов содержаться алгоритмы, выходной
сигнал которых зависит не только от текущего значения сигналов
на сигнальных и настроечных входах алгоблока, но и как от теку- щего реального времени, отсчитываемого процессором контрол- лера в режиме «работа», так и начального значения выходного
сигнала в момент времени после перевода контроллера из режима «программирования» в режим «работа».
Работа таких алгоритмов происходит в динамике или в тече- ние всего времени работы программы. К этим алгоритмам относят алгоритмы численного вычисления функций содержащих произ- водную входного параметра в качестве аргумента. К алгоритмам динамического преобразования относятся:
1.ИНТ(ЗЗ) - Интегрирование
2.ДИФ(34) - Дифференцирование
3.ФИЛ(35) - Фильтр
4.ДИН(36) - Динамическое преобразование
5.ДИБ(37) - Динамическая балансировка
6.ОГС(38) - Ограничение скорости
127
7. ЗАП(39) - Запаздывание
Рассмотрим более подробно некоторые алгоритмы динами- ческих преобразований.
Алгоритм ИНТ (33) - интегрирование
Алгоритм используется для интегрирования и (или) запоми- нания сигнала. Алгоритм представляет собой интегрирующее зве- но, выходной сигнал которого определяется в соответствии с вы- ражением:
Y(t)= |
1 |
× òτ X(t)dt + ХНАЧ |
T |
||
|
И |
0 |
где Х – сигнал на основном (сигнальном) входе алгоритма; ТИ – постоянная времени интегрирования; τ- текущее время; ХНАЧ – на- чальное значение (при τ=0) выходного сигнала алгоритма.
Код 33 |
m - отсутствуе т |
МВ = 00;01 |
Х(к) 01 |
|
01 Y(к) |
ТИ 02 |
|
|
СНАЧ 03 |
|
|
ХНАЧ 04 |
|
02 D |
ХПОР 05 |
|
|
|
|
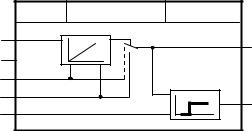
Рис.32. Функциональная схема алгоритма "ИНТ – интегратор"
Алгоритм содержит пороговый элемент. Если выходной сиг-
нал Y<ХПОР, где ХПОР
– уставка порогового значения, то дискрет-
ный сигнал на выходе порогового элемента
D=0. Если Y³ХПОР, то
D=1.
Функциональная схема алгоритма представлена на рис.32. Назначение входов и выходов алгоритма представлено в табл.31.
В алгоритме предусматривается установка начальных усло- вий. Если дискретный сигнал на входе алгоритма СНАЧ=0, то вы- полняется основная функция интегратора. При СНАЧ=1 интегратор переходит в режим установки начальных условий, при этом Y=ХНАЧ. В частном случае при ХНАЧ=0 алгоритм обнуляется.
Алгоритм относится к группе следящих. Вход Х и выход Y – каскадные. Если на выход Y поступает команда отключения с зна- чением начальных условий Y0, интегральная ячейка отслеживает это значение, при этом пороговый элемент продолжает нормально
128

работать. Через каскадный вход Х команда отключения и значение обратного счета Х0 транслируются предвключенному алгоритму.
Таблица 31
Входы и выходы алгоритма ИНТ
|
Входы - выходы |
|
Назначение |
||
N |
Обозначение |
|
Вид |
||
|
|
||||
01 |
Х(к) |
|
|
Основной вход (каскадный) |
|
02 |
ТИ |
|
|
Постоянная времени интегрирования |
|
03 |
СНАЧ |
|
Входы |
Команда установки начальных условий |
|
04 |
ХНАЧ |
|
|
Значение начальных условий |
|
05 |
ХПОР |
|
|
Уставка порогового элемента |
|
01 |
Y(к) |
Выходы |
Основной выход (каскадный) |
||
02 |
D |
Выход порогового элемента |
|||
|
|
||||
Алгоритм ФИЛ (35) - фильтр
Алгоритм используется для фильтрации высокочастотных помех, а также для динамической коррекции. Фильтр, имеющий порядок выше первого, можно получить путем последовательного включения нескольких алгоритмов ФИЛ. Входы-выходы алгоритма ФИЛ и его функциональная схема приведены в табл. 32 и на рис. 33 соответственно.
Алгоритм является фильтром нижних частот первого поряд- ка и представляет собой инерционное звено первого порядка. Его выходной сигнал определяется в соответствии с выражением:
Y(t)= X(t)- TФ × dYdt(t),
где Тф ¾ постоянная времени фильтра.
|
|
|
|
|
|
|
|
|
Алгоритм не ини- |
||
|
|
Код 35 |
m = отсут |
МВ = 00,01 |
|
||||||
|
|
|
циализирует |
обратный |
|||||||
|
|
|
|
|
|
|
|
|
|||
Х(к) |
|
|
|
|
|
|
|
счет, но если по инициа- |
|||
01 |
|
|
|
|
|
|
|||||
1 |
|
|
01 |
Y(к) |
тиве других |
алгоритмов |
|||||
|
|
|
|
|
на каскадный вход Y по- |
||||||
ТФ |
02 |
||||||||||
|
TФР +1 |
|
|
|
|
ступает команда отклю- |
|||||
|
|
|
|
|
|
|
|
|
чения со значением на- |
||
|
|
|
|
|
|
|
|
|
чальных условий Yо. |
||
|
|
|
|
|
|
|
|
|
|||
|
Рис.33. Функциональная схема |
|
|
||||||||
|
|
алгоритма ФИЛ – фильтр |
|
|
|||||||
129
Эти сигналы через каскадный вход Х транслируются пред- включенному алгоритму. Ячейка фильтра при отключении заряжа- ется до значения Yо.
Модификатор m в алгоритме отсутствует, масштаб времени МВ=00, 01.
|
|
|
Таблица 32 |
|
Входы-выходы алгоритма ФИЛ |
||
|
|
|
|
Номер |
Обозначение |
Вх-Вых |
Назначение |
01 |
Х |
Вход |
Основной вход (каскадный) |
02 |
Тф |
“ |
Постоянная времени фильтра |
01 |
Y |
Выход |
Основной выход |
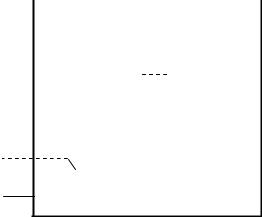
Алгоритм ЗАП (39) - запаздывание
Алгоритм моделирует звено чистого запаздывания и исполь- зуется для введения динамической коррекции или для моделиро- вания динамических свойств объекта управления.
Алгоритм содержит несколько (до 12) ячеек памяти. Число этих ячеек 0 < МР < 12 задается модификатором.
По каждой команде отсчета происходит “проталкивание” сигналов через ячейки памяти: в первую ячейку записывается те- кущее значение входного сигнала Х, значение, ранее записанное в первой ячейке, пересылается во вторую ячейку, предыдущее зна- чение, записанное во второй ячейке, пересылается в третью ячей- ку и т.д. Текущее значение последней ячейки является выходным сигналом.
Таким образом, текущее значение входного сигнала Х поя- вится на выходе Y через m отсчетов. При этом выходной сигнал Y будет запаздывать относительно сигнала Х на время m*T, где Т - интервал времени между отсчетами (при условии, что этот интер- вал постоянен). Если m=0, то всегда Y=X. Входы-выходы алгорит- ма ЗАП приведены в табл.33, его функциональная схема приведе- на на рис.34.
Команда отсчета может поступать либо от внутреннего тай- мера, либо извне ¾ на вход СОТС. В последнем случае отсчет осу- ществляется по переднему фронту сигнала СОТС. Алгоритм имеет дискретный вход СРЕЖ. Если СРЕЖ=0, то управление ведется от внутреннего таймера, если СРЕЖ=1 ¾ то от внешней команды СОТС.
В момент отсчета (в любом режиме) на дискретном выходе DОТС на время, равное одному циклу работы контроллера (т.е. на время от 0.2 до 2 с.) формируется сигнал DОТС=1. В остальное
130
время DОТС=0. Этот выход позволяет включать алгоритмы ЗАП по- следовательно, увеличивая время запаздывания без увеличения времени квантования входного сигнала. Для этого выход DОТС каж-
дого предыдущего алгоритма ЗАП соединяется со входом СОТС каждого последующего алгоритма ЗАП, причем в последующих алгоритмах используется внешнее управление отсчетами.
При управлении от внутреннего таймера интервал времени между отсчетами (период квантования) задается с помощью на- строечного входа Т. Значение Т<То (То=0,2-2 с ¾ время цикла работы контроллера), алгоритм воспринимает как Т=То.
При сигнале “сброс” (ССБР=1) во все ячейки памяти записы- вается сигнал на входе Х, при этом Y=Х (т.е. запаздывание отсут-
ствует). Если используется внешнее управление и сигналы СОТС=1 и ССБР=1, то после снятия сигнала “сброс” происходит однократ- ное проталкивание (т.е. такая ситуация воспринимается алгорит- мом как приход переднего фронта сигнала СОТС). Аналогично ведет себя алгоритм, если при СОТС=1 осуществляется переход от внут- реннего к внешнему управлению (т.е. выполняется переход от
СРЕЖ=0 к СРЕЖ=1).
Код 39 |
m = 00 −12 |
МВ = 00,01 |
|
|
|
|
|
Х(к) 01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 Y(к) |
||
|
1 |
|
|
2 |
|
m |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ССБР |
02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
02 DОТС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
СОТС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
СРЕЖ |
04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТМР |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т05
Рис. 34. Функциональная схема алгоритма ЗАП – запаздывание
При управлении от внутреннего таймера время чистого за- паздывания определяется выражением:
tзап = m×T .
131
Если m = 0, то Y = Х и DОТС = 0.
Для того, чтобы при сохранении требуемого значения tзап
уменьшить период квантования входного сигнала, следует умень- шать время Т и увеличивать значение модификатора m. Если тре- буемое значение m>12, следует использовать несколько алгорит- мов запаздывания, включенных последовательно. В этом случае общее время запаздывания равно:
tзап = m1T1 + m2T2 + ...+ miTi ,
где mi, Ti ¾ соответственно модификатор и параметр Т для i-го алгоритма запаздывания, включенного в последовательную цепочку.
Если значения m и Т у каждого алгоритма одинаковы, общее время запаздывания равно:
tзап = m×T×n,
где n - число последовательно включенных алгоритмов запазды- вания.
Алгоритм не инициирует обратный счет, но если по инициа-
тиве других алгоритмов на каскадный выход Y пришла команда отключения со значением начальных условий Yо, то значение Yо записывается во все ячейки памяти и внутренний таймер обнуля- ется. Команда отключения и величина Yо через каскадный вход Х транслируется предвключенному алгоритму.
Модификатор МР=00-12, масштаб времени МВ=00, 01. Таблица 33
Входы-выходы алгоритма ЗАП
Номер |
Обозначение |
Вх-Вых |
Назначение |
01 |
Х |
Вход |
Основной вход (каскадный) |
02 |
Ссбр |
|
Команда сброса |
03 |
Сотс |
|
Команда отсчета |
04 |
Среж |
|
Выбор режима |
05 |
Т |
|
Период отсчета |
01 |
Y |
Выход |
Основной выход (каскадный) |
02 |
Dотс |
“ |
Признак отсчета |
2. Построение схемы конфигурации алгоритмов
Математическое описание модели объекта управления представляется следующей передаточной функцией:
132