

Билет №17
.docxБ И Л Е Т № 17
1. Естественные и искусственные характеристики электропривода с двигателями последовательного возбуждения.
Уравнение механической характеристики w=(U-I∙R)/кФ
R – Сумарное сопротивление якорной цепи.

Т.к. нет точного аналитического выражения для кривой намагничивания, то трудно дать и точное аналитическое выражение для механической характеристики двигателя последовательного возбуждения.
Если для упрощения анализа предположить, пренебрегая насыщением магнитной системы, линейную зависимость между (Ф и I) (показано пунктиром), т.е. считать что Ф=α∙I, то момент двигателя М=кФ∙I=α∙R∙I².
Подставив в равенство для угловой скорости двигателя значение тока, получим выражение механической характеристики:

(1)
Отсюда
следует, что при насыщеной магнитной
цепи двигателя механическая характеристика
имеет вид:
Уравнение (1) даёт лишь общее представление о механической хар-ке двигателя последовательного возбуждения.
При расчётах этим уравнением пользоватся нельзя, т.к. обычно не делают машины с ненасыщеной магнитной системой.
На практике построение хар-к ведут графо-аналитическим методом, или по каталогам.
Построение Искуственных характеристик
Уравнение
естественной хар-ки:

wе=(U-I∙Rа)/кФ или
где Ra= RЯ+RВ;
При включении в цепь двигателя резистора RД , двигатель будет работать на реостатной характеристике.
Поделим: w/we=[U-I(Ra+RД)]/(U-I∙Ra)


получим:
Или
в относительных 
единицах:
где
Ra*=Ra/Rном;
w*=w/wном;
we*=we/wном; I*=I/Iном;
1 Введение Rд


Большие
эл. Потери
 Rд
должен быть рассчитан по-другому чем
Rпуск.
При пуске двигателя tпуска
мало
Rд
должен быть рассчитан по-другому чем
Rпуск.
При пуске двигателя tпуска
мало
 Rпуск
работает мало
Rпуск
работает мало
 до
tдоп
не успевает нагреться. Rд
в работе находится дольше
до
tдоп
не успевает нагреться. Rд
в работе находится дольше греется больше. Rд
должен быть рассчитаны на больший ток
греется больше. Rд
должен быть рассчитаны на больший ток



 Регулирование
осуществляется при постоянстве момента.
Регулирование
осуществляется при постоянстве момента.
Недостаток
- большие потери(низкие энергетические показатели)
При малом Мс регулирование – в малых пределах - двигатель работает на повышенных скоростях.
Способ применяется в крановых и металлургических приводах, в транспорте – при больших нагрузках.
Но
учитывая особенности двигателя последов
возбуждения
 П-Д не применяется. В транспорте удобно
использовать приведённые схемы (где
несколько двигателей питаются от одного
Uпит).
П-Д не применяется. В транспорте удобно
использовать приведённые схемы (где
несколько двигателей питаются от одного
Uпит).
 U
измен путём последовательно –
параллельного включения двигателей
U
измен путём последовательно –
параллельного включения двигателей
 Uзависит
от числа двигателей.
Uзависит
от числа двигателей.

Регулирование скорости шунтированием возбуждения обмоток ДПТ последов возбужд
*шунтирование ОЯ
*шунтирование ОВ

Уравнение механических характеристик для каждой из схем могут быть получены, если для них записать уравнения по 1 и2 законам Кирхгофа. После преобразований этих уравнений получим:




При условии что Rп = const, Rш= var получены хар-ки:
 при
шунтировании ОЯ вместе с ОВ хар-ки
становятся более пологими при малых
нагрузках могут получить большой
диапазон изменения скорости
при
шунтировании ОЯ вместе с ОВ хар-ки
становятся более пологими при малых
нагрузках могут получить большой
диапазон изменения скорости
 но
регулирование неэкономичное – большие
потери в Rш.
Регулирование вниз от основной при
М=const
но
регулирование неэкономичное – большие
потери в Rш.
Регулирование вниз от основной при
М=const


Применяется для механизмов, требующих высокий диапазон регулирования скорости при малых напряжениях.
б ) примен чаще всего
 показ. Какая часть напряжения сети
прикладывается к двигателю
показ. Какая часть напряжения сети
прикладывается к двигателю

Здесь можно:
- менять Rш при Rп= const
-менять Rп при Rш = const
Рассмотрим вид хар-к,когда Rп – var, Rш= const
3
) Rп1 Rп2
Достоинство этой схемы в отличии от
схемы а) – в том что можно получить
устойчивые скорости из х.х
Rп2
Достоинство этой схемы в отличии от
схемы а) – в том что можно получить
устойчивые скорости из х.х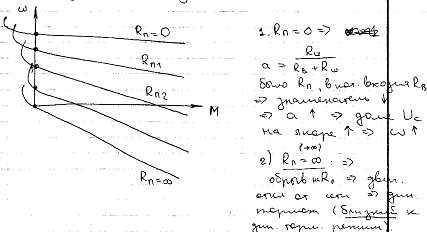
Используется для двигателей подъёмных механизмов. При спуске груза можно получить устойчивую скорость из х.х
Жёсткость,а
 и стабильность выше
и стабильность выше
Но большие потери
Регулирование скорости вниз от номинального значения при М= const
При малых напряжениях D ниже. Регулирование ступенчатое
в
)




Хар-ки близки к характеристикам для схемы б)
Шунтирование ОВ

Можно записать исходные уравнения:
2ой
закон
 для первого контура (нижней цепочки)
для первого контура (нижней цепочки)
 -
для второго контура
-
для второго контура



Применяется для мех-мов, требующих увеличение скорости при нормальных нагрузках. Считают допустимым увеличение скорости не более чем в 2 раза.
2. СУЭП постоянного тока с отрицательной обратной связью по напряжению двигателя.
В случаях когда не предъявляется высоких требований к качеству регулирования, используются САР скорости с отрицательной обратной связью по напряжению.

Uон=Кон ∙ Ud;
Кон=(10–8) /Еdo;
Кон=Кдел∙Кдн;
Кдел=R1/(R1+R2)=Кон;
Кдн=1;
Ud=ed – ia∙Rтп –Lтп∙di/dt; ;

Ud(P)=ed(P) – ia(P)∙ (Rтп+P∙Lтп); ;
Данная структура
используется для коррекции системы и
для анализа динамики. Структурная схема
в статике вырожденная
Р –> 0.
На основании принципиальной схемы или исходных соотношений можно записать:
 (1);
(1);
 (2);
(2);
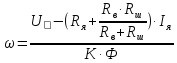
На основании
структуры в статике или по соотношениям
(1) и (2) имеем:
(3);
 w=f
(I);
w=f
(I);

w=f (M);
Крн – контурный коэффициент регулятора напряжения разомкнутой системы. Крн=Кр∙Ктп∙Кон;
Введение отрицательной обратной связи по напряжению позволяет снизить влияние на жесткость механической характеристики в 1/Крн раз по сравнению с разомкнутой системой. При этом понижается ∆wc , повышается точность и диаппазон регулирования скорости.
При Крн –> ∞ ∆wс –> (RC∙Rа)/кФ – в пределе естественной.
3. С какой целью в контур регулирования скорости в системах с двухзонным регулированием скорости включают корректирующее звено? Каковы способы реализации этого звена?
При изменении потока возбуждения (при регулировании скорости потоком) изменяется настройка контура регулирования скорости.
Для компенсации влияния этого изменения и обеспечения неизменных динамических свойств системы регулирования коэфициент усиления регулятора скорости автоматически изменяется обратно-пропорционально степени ослабления поля. Это обеспечивается введением в конур регулирования скорости множительно-делительного устройства (МДУ), с помощью которого выходное напряжение РС умножается на сигнал, пропорциональный скорости двигателя и делится на сигнал, пропорциональный ЭДС двигателя. МДУ изменяет коэффициент усиления контура регулирования скорости только при ослаблении потока возбуждения двигателя. Это обеспечивается за счёт введения на множительном и делительном входах МДУ схем выделения большего из 2-х положительных сигналов, реализованых на 4-х диодах.
Прп
ослаблении потока возбуждения скорость
и ЭДС двигателя превышают номинальные
значения (w0
и E0)
и открываются диоды D2
и D3
и МДУ повышает коэффициент усиления
регулятора скорости.
При ослаблении потока возбуждения, пропорционально ему ослабляется и эл. магнитный момент. С этим ослаблением уменьшается коэффициент в прямом канале, следовательно снижается быстродействие, увеличивается статическая просадка скорости.
Принцип построения:
МДУ строится по время-импульсному принципу перемножения, и поэтому его выходной сигнал представляет собой серию импульсов с различной скважностью.(3-ий вопрос 1-го билета)