

Билет №19 (Без 3го вопроса)
.docxБ И Л Е Т № 19
1. Тормозные режимы работы электропривода с двигателями последовательного возбуждения.
Двигатель посл возб можно использовать как в двигательном так и в тормозном режимах. Однко его возможности в части создания тормозных режимов ограничены в сравнении ДПТ с НВ. Тормозной режим с отдачей энергии в сеть практически не может быть осуществлён. Автоматический переход в этот режим не может быть осуществлён по двум причинам: 1. При уменьшении момента и переходе в режим х.х. скорость дв-ля может достичь недопустимых по условиям прочности пределов. 2. При изменении направления тока якоря одновременно изменяется и направление магнитного потока, поэтому для сохранения знака МДС при переходе в генераторный режим необходимо переключение концов ОВ. Если дв-ль посл. возб. всё же будет переведён в тормозной режим с отдачей энергии в сеть, то работа его в этом режиме будет неудовлетворительной. Рассмотрим два других возможных тормозных режима.
А)Торможение противовключением.
Это основной тормозной режим для ДПТ с посл. возб. Для механизмов с потенциальным статическим моментом (мех-зм подъёма кранов) переход из двигательного режима подъём груза(точка А)(рис а.) – в режим тормозного спуска груза осуществляется введением добавочного сопротивления в цепь якоря. При этом момент, развиваемый двигателем, становиться меньше статического (точка В). Под действием статического момента, превосходящего момент дв-ля, груз начнёт опускаться, вращая якорь двигателяв противоположном направлении.
Для
осущ. Торможения механизма с реактивным
статическим моментом (при сохранении
направления движения механизма)
необходимо изменить знак момента
двигателя, что достигается за счёт
изменения направления тока в обмотке
якоря. Схема на рис б. В обоих случаях
противовключения механические хар-ки
имеют значительную крутизну. Для
ограничения величины тормозного момента
в цепь якоря необходимо включать
значительное сопротивление.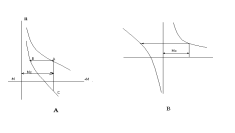
Б) Электродинамическое торможение.
Может
быть осуществлено при работе с
самовозбуждением и с независимым
возбуждением. Широкое применение нашло
динамическое торможение с самовозбуждением,
так как оно не требует питания обмоток
двигателя от сети, что является
обязательным условием для схем аварийного
торможения.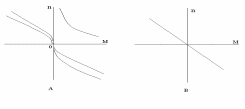
Сущность
этого тормозного режима заключается в
том, что двигатель отключенный от сети
замыкается на тормозное сопротивление
и работает в качестве генератора с
самовозбуждением. Однако процесс
самовозбуждения имеет место только в
том случае, если ЭДС машины, определяемая
величиной магнитного потока и скоростью
вращения больше падения напряжения в
сопротивлении тормозного
контура Е>I(Rя+Rв+Rт).
На рис А приведены схемы включения дв-ля
при динамическом торможении с
самовозбуждением.
Е>I(Rя+Rв+Rт).
На рис А приведены схемы включения дв-ля
при динамическом торможении с
самовозбуждением.
Часто для получения большей плавности торможения прибегают к динамическому торможению с независимым возбуждением. В этом случае ОВ с добавочным сопротивлением, ограничивающим ток, подключается к сети, а якорь замыкается на тормозное сопротивление (Характеристика на рис В). Для получения достаточного тормозного момента дв-ль должен иметь поток примерно равный номинальному, то есть ток возб. тоже примерно равен номинальному. Следовательно при торможении с независ возб. из сети будет потребляться мощность почти равная номинальной. В этом случае получаем хар-ки дв-ля независ. Возб. при значительно худших энергетических показателях.
2. Система ТП-Д в зоне прерывистого режима как объект регулирования. Адаптивный регулятор тока.
В системе ТП-Д при токе якоря

имеет место прерывистый режим. Когда существенно изменяются параметры объекта регулирования. В зоне прерывистого режима механические х-ки становятся нелинейными, изменяется регулировочная х-ка.


При
 :
:
 ;
;
 :
:
 .
.
На рис.3.4.2 показаны-
а)граничный режим( );
б)прерывистый режим(
);
б)прерывистый режим( ).
Процессы для тока заканчиваются на
одном интервале проводимости, что
эквивалентно исчезновению электромагнитной
инерционности якоря (
).
Процессы для тока заканчиваются на
одном интервале проводимости, что
эквивалентно исчезновению электромагнитной
инерционности якоря ( ).
).
В зоне прерывистого
тока
 изменяется от
изменяется от
 в граничном режиме до бесконечности в
режиме идеального холостого хода (
в граничном режиме до бесконечности в
режиме идеального холостого хода ( ).
).
На рис.3.4.3 показана структурная схема системы ТП-Д как объекта регулирования в прерывистом режиме.

В непрерывном режиме передаточная функция имеет вид:
 .
.
В зоне прерывистого режима передаточная функция имеет вид:
 .
.
 .
.
 .
.
 меняется
от
меняется
от
 в граничном режиме до бесконечности в
режиме идеального холостого хода.
в граничном режиме до бесконечности в
режиме идеального холостого хода.
Т.о., структурная схема и параметры объекта существенно изменяются, объект становится нелинейным. Из-за этого САР в зоне прерывистого режима размыкается, динамические свойства резко ухудшаются и когда требуется повышенное качество работы САР, необходимо в зоне прерывистого режима принимать определенные меры.
Для серии КТЭ
регулирование тока якоря осуществляется
адаптивным регулятором тока с эталонной
моделью, реализованным на ячейке
адаптации N210.
Усилитель
А1 является пропорционально – интегральным
регулятором тока. Апериодическое звено,
выполненное на усилителе А3, формирует
сигнал эталонного переходного процесса.
На усилителе А4 к сигналу выхода регулятора
тока добавляется разность между сигналами
эталонного и фактического переходного
процессов.
Эталонная модель позволяет сохранить удовлетворительными переходные процессы при неточной настройке регуляторов.
Адаптация
в режиме прерывистых токов (изменение
структуры регулятора тока на чисто
интегральный, и увеличение коэффициента
усиления РТ) реализована схемой адаптации.
Генератор, G
формирует пилообразные колебания Uп,
которые на компараторе АU
сравниваются с модулем сигнала с
эталонной модели, то есть со средним
значением тока двигателей. Пока среднее
значение сигнала Id
превышает амплитуду пилообразного
напряжения, напряжение с компаратора
АU=0.
При ослаблении сигнала среднего значения
тока до величины пилообразного напряжения
Uп,
под действием напряжения с АU
РТ становится чисто интегральным и
уменьшая входное сопротивление
регулятора, тем самым увеличивая его
коэффициент передачи в прерывистом
режиме.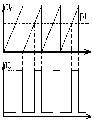
В данной схеме увеличение быстродействия в контуре регулирования тока при прерывистом характере тока достигается за счет изменения структуры регулятора тока при вхождении в прерывистый режим. В режиме непрерывного тока результирующая регулятора тока определяется:

При вхождении в зону прерывистых токов будет:
 ;
;
 причем
причем
 .
.
Изменение структуры регулятора при переходе от ПИ к И режиму осуществляется ключем К2. Для того, чтобы исключить переходный процесс связанный с изменением параметров РТ, переключение осуществляется методом широтно-импульсной модуляции, при этом частота модуляции на порядок выше частоты пульсации тока якоря. С этой целью управление К2 осуществляется с помощью компаратора напряжения AU, на входе которого сравнивается сигнал с выхода генератора пилообразного напряжения G и модуль главной составляющей сигнала задания на ток.
Амплитуда пилообразного напряжения выбирается исходя из величины сигнала задания на ток, соответствует величине гранично-непрерывного тока в рабочей зоне преобразования (правый рисунок).
В прерывистом режиме на время, в которое среднее значение меньше пилообразного напряжения, компаратор AU закрывает ключ К2, происходит адаптация к прерывистому режиму. Время адаптации тем больше, чем глубже прерывистый режим.