

Билет №26
.docxБ И Л Е Т № 26
1. Метод средних потерь при проверке двигателей по нагреву.
Для большинства
режимов электроприводов механизмов
надежно выполняется неравенство
 и значение
и значение
 лежит в пределах 0,2 – 0,01. В этих условиях,
даже при сравнительно большом
среднеквадратичном отклонении
лежит в пределах 0,2 – 0,01. В этих условиях,
даже при сравнительно большом
среднеквадратичном отклонении
 потерь
от средних,
потерь
от средних,
 мало. Например, при
мало. Например, при
 :
:

Причем в соответствии
с
 дается
оценка
дается
оценка
 с запасом в сторону увеличения, где
с запасом в сторону увеличения, где
 - период функции
- период функции
 (или время цикла
(или время цикла
 );
);
 -
коэффициент Фурье;
-
коэффициент Фурье;
 - среднее по времени
значение функции
- среднее по времени
значение функции
 ;
;
 - среднее значение температуры
- среднее значение температуры
 ;
;
 - теплоотдача,
количество теплоты, выделяемой двигателем
в окружающую среду в единицу времени
при превышении температурой двигателя
температуры среды на
- теплоотдача,
количество теплоты, выделяемой двигателем
в окружающую среду в единицу времени
при превышении температурой двигателя
температуры среды на
 ,
,
 ;
;
 - максимальное
отклонение превышения температуры от
среднего значения.
- максимальное
отклонение превышения температуры от
среднего значения.
При этом можно
убедиться в отсутствии недопустимого
превышения, оценив лишь средние потери
за цикл. Основное соотношение метода
средних потерь, на базе которого
оказывается возможным эквивалентировать
действительный и номинальный режимы в
тепловом отношении, легко получить,
записав вначале условие непревышения
средней температурой в произвольном
режиме средней температуры в номинальном
через
 в
виде:
в
виде:
 откуда следует,
что должно выполняться условие
откуда следует,
что должно выполняться условие
 или
или
 (1) .
(1) .
Соотношение (1) является основным соотношением метода средних потерь. Из (1) вытекает следующий порядок проверки эквивалентности в тепловом отношении режима, в котором предполагается работа того или иного двигателя и номинального режима этого двигателя.
Например, по
нагрузочной диаграмме механизма
определяем среднюю мощность
 ,
где
,
где
 - мощность на валу
двигателя на
- мощность на валу
двигателя на
 -ом
интервале (рис.1). Затем
-ом
интервале (рис.1). Затем
 умножаем на коэффициент запаса
умножаем на коэффициент запаса
 и
и
 - расчетная мощность.
- расчетная мощность.
На основании
полученной мощности по каталогу
предварительно выбираем соответствующий
двигатель. По кривой К.П.Д. двигателя в
функции нагрузки находим потери мощности
для каждого интервала нагрузочной
диаграммы и строим зависимость
 (рис.1). Затем находим средние потери за
цикл, которые и сопоставляем с номинальными:
(рис.1). Затем находим средние потери за
цикл, которые и сопоставляем с номинальными:
 ,
где
,
где
 - соответственно номинальная мощность
и К.П.Д. двигателя.
- соответственно номинальная мощность
и К.П.Д. двигателя.
Если это неравенство выполняется с большим запасом, то это означает, что выбранный двигатель будет недоиспользован по нагреву и, следовательно, по мощности.
Если возникают затруднения с определением К.П.Д. двигателя в зависимости от нагрузки, то можно воспользоваться для проверки выбранного двигателя методом эквивалентного тока, основанным на замене действительного тока эквивалентным постоянным током, который вызывает в двигателе те же потери, что и фактически протекающий ток (рис.2).
Теперь рассмотрим
возможность применения метода средних
потерь при переменной теплоотдаче.
Основное соотношение метода средних
потерь (1) было получено для случая
постоянной и равной номинальной
теплоотдаче
 ,
поэтому в таком виде не может быть
применено с целью эквивалентирования
режимов для двигателей с самовентиляцией
в условиях снижения их скорости в течение
цикла.
,
поэтому в таком виде не может быть
применено с целью эквивалентирования
режимов для двигателей с самовентиляцией
в условиях снижения их скорости в течение
цикла.
Ступенчатый график при длительной Фактическое изменение тока в
переменной нагрузке. цикле и эквивалентный ток.


Изменение теплоотдачи
 возможно лишь в сторону уменьшения,
значит в периоды ухудшения теплоотдачи
постоянная
возможно лишь в сторону уменьшения,
значит в периоды ухудшения теплоотдачи
постоянная
 увеличивается, что должно способствовать
еще большему снижению колебаний
увеличивается, что должно способствовать
еще большему снижению колебаний
 ,
но привести к установлению среднего
значения установившегося превышения
температуры больше того, которое
соответствовало бы номинальному значению
,
но привести к установлению среднего
значения установившегося превышения
температуры больше того, которое
соответствовало бы номинальному значению
 .
.
Пусть теплоотдача
на участке цикла
 равна
равна
 ,
тогда, пренебрегая колебаниями
температуры, уравнение баланса тепловой
энергии за цикл можно записать в виде
,
тогда, пренебрегая колебаниями
температуры, уравнение баланса тепловой
энергии за цикл можно записать в виде
 (2)
(2)
где левая часть – количество теплоты, отданной среде за цикл, а правая часть – количество теплоты, выделившейся в машине за это же время.
Несколько преобразуем
(2) и получим выражение для

 .
.
Сравнивая рассматриваемый режим с номинальным по нагреву, записываем необходимое соотношение для превышения температуры:

откуда следует основное соотношение метода средних потерь для режимов с переменной теплоотдачей в виде
 (3) или, так
как
(3) или, так
как
 ,
а
,
а
 ,
в такой записи:
,
в такой записи:
 (4)
(4)
При
 (4) обращается в (1).
(4) обращается в (1).
2.
Система скалярного управления АД с
обратной связью по скорости.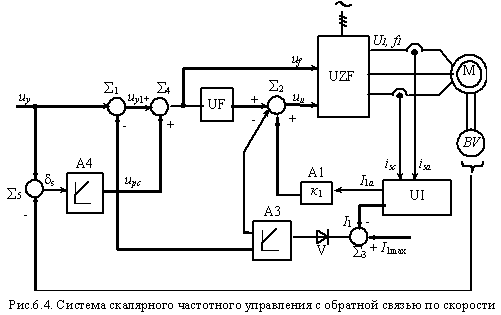
Увеличение диапазона регулирования по скорости АД возможно за счет применения в системах управления электроприводом отрицательной обратной связи по скорости. Функциональная схема подобной системы дана на рис. 6.4. Здесь, к каналам обратных связей по току АД, используется канал отрицательной обратной связи по скорости. Он включает в себя тахогенератор BV, как датчик обратной связи, узел суммирования 5 сигналов управления скоростью АД uу и обратной отрицательной связи по скорости uос , регулятор абсолютного скольжения А4, блок ограничения АQ его выходного сигнала uрс , а так же узел суммирования 4 сигнала uрс и результирующего сигнала uу1 с выхода сумматора 1.

По мере увеличения нагрузки на валу АД (моменты М1, М2 на рис. 6.5) за счет уменьшения скорости АД и, соответственно сигнала uос , увеличивается сигнал рассогласования s = uу - uос 0.0 - sa , пропорциональный абсолютному скольжению двигателя. Здесь: 0.0 - заданная скорость идеального холостого хода АД, соответствующая исходному сигналу управления uу ; - реальная скорость АД при заданной нагрузке на его валу. При s 0 сигнал uрс на выходе регулятора скольжения, суммируясь с сигналом uу1 = uу (при I1 I1max ), за счет интегральной составляющей передаточной функции регулятора А4 обеспечивает такое приращение сигнала управления uf преобразователем частоты, при котором частота его выходного напряжения становится равной f1.0 (1+sa). Одновременно с изменением частоты за счет функционального преобразователя UF меняется по сравнению с начальным U1.0 и выходное напряжение преобразователя U1 (рис. 6.5, б). При этом скорость двигателя восстанавливается до заданного значения 0.0 , т. е. обеспечивается абсолютная жесткость механической характеристики АД (линия 1 на рис. 6.5, а). Для увеличения перегрузочной способности АД по моменту дополнительно к основному контуру стабилизации скорости может быть использован и канал положительной обратной связи по току статора (устройство А1 на рис. 6.4).
При превышении максимально допустимого тока статора АД (при I1 I1max и, соответственно, М М max), регулятор скольжения должен быть исключен из работы, например ограничением его выходного сигнала uрс на уровне uрс.max (рис. 6.5, в). При этом вступают в работу отрицательные обратные связи по току статора с регулятором А3, обеспечивая за счет одновременного уменьшения частоты и напряжения статора АД до их минимальных значений f1min и U1min ограничение момента АД при = 0 на уровне М max (линия 2 на рис. 6.5,а). При этом минимальная синхронная скорость двигателя 0.min будет соответствовать значениям f1min и U1min , а механическая характеристика линии 3 (рис. 6.5,а).
Устойчивость и динамические показатели качества регулирования скорости АД определяются выбором коэффициента пропорциональной и постоянной времени интегральной составляющих передаточных функций регуляторов А4 и А3.
3. Требования, предъявляемые к электроприводам механизмов подачи металлорежущих станков.
