

Билет №41
.docxБ И Л Е Т № 41
1. Переходные процессы в электроприводах с линейными механическими характеристиками без учета индуктивности.
2. Ограничение ускорения в системе подчиненного регулирования координат с ПИ-регулятором скорости, динамические характеристики.
3. Сравнительный анализ преобразователей частоты комплектных электроприводов.
-
Переходные процессы в электроприводах с линейными механическими характеристиками без учета индуктивности.
Переходный процесс электропривода с линейной механической характеристикой при одно и многоступенчатом пуске в случае Мс=const; 0=const
При одноступенчатом пуске переходный процесс описывается уравнениями
 ;
;

если
увеличение скорости происходит не от
=0,
а от какого-то начального установившегося
значения, как показано на графиках.
Закон изменения ускорения
 , где
, где


Уменьшение по мере увеличения скорости объясняется непрерывным уменьшением динамического момента Мдин. Если разгон идет из неподвижного состояния, т.е. когда нач=0 , то


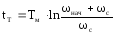
Время разгона на любом участке процесса до какой либо промежуточной скорости кон

Т.к.
кон=c
, то . Практически процесс считается
закончившимся, когда разность между
установившимся и текущим значением
снижается
до 2%, т.е.
. Практически процесс считается
закончившимся, когда разность между
установившимся и текущим значением
снижается
до 2%, т.е.
 или
или

При нач=0 кон=0,98с . поэтому

Обычно принимается t=(3-4)Tм
Величину Тм можно определить проведя касательную в любой точке кривой (t) или М(t), например, в начале координат, как показано на графиках или используя следующие выражения

Для
расчета переходного процесса при
многоступенчатом пуске сначала строится
пусковая диаграмма по ранее изложенным
правилам задавшись пусковым и переключающим
моментами. Для любой ступени разгона
время, в течение которого момент
изменяется от М1
до М2
может быть определено по формуле

Постоянная времени для любой ступени разгона

Законы изменения и М при разгоне на любой ступени определяются согласно ранее приведенным выражениям.
Для примера рассчитаем переходный процесс на первой и второй ступенях. Сначала для первой ступени
1.
 3.
3.

2.
 4.
4.

Значения н1 и с1 находятся из графика, где изображена пусковая диаграмма при М=Мн и М=Мс . Задаваясь временем t от 0 до t1 , рассчитываются законы изменения и М на первой ступени и строятся кривые =f(t) и M=f(t).
Далее делается расчет процесса на второй ступени
1.
 3.
3.

2.
 4.
4.

Значения с2 и к1 находятся из пусковой диаграммы. Задавясь временем t от 0 до t2, рассчитываются и строятся кривые =f(t) и M=f(t) для второй ступени и т.д. Время разгона на естественной характеристике до н=с принимается равным tн=(3-4)Tм, где в Тм вместо нх подставляется н.
Переходные процессы электропривода с линейной механической характеристикой при Мс=const, 0=const в тормозных режимах
Рассмотрим сначала реверс, который заключается в торможении противовключением с дальнейшим изменением направления вращения и разгоне в противоположную сторону.
Если реверс осуществляется при активном моменте сопротивления Мс=const, переходный процесс описывается уравнениями, приведенными ранее для двигательного режима, с той разницей, что в выражениях для и М нужно поставить знак минус перед с и перед Мнач


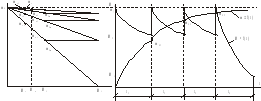
На
графике с механическими характеристиками
показан переход из двигательного режима
в режим противовключения и построены
кривые переходного процесса. Двигатель
при переводе его в режим противовключения
тормозится по линии ВС. Затем, если его
не отключить от сети, будет разгоняться
в обратном направлении по линии CD,
достигает скорости идеального холостого
хода (-0)
и т.к. момент сопротивления активный,
переходит в генераторный режим с отдачей
энергии в сеть (линия DE).
Равновесие наступит в т.Е, где М=Мс
и скорость с
.Такой процесс может быть, если в случае
подъема тяжелого груза двигатель
тормозится противовключением и при =0
не отключается и не затормаживается
механическими тормозами.
При
реактивном моменте сопротивления
процесс разбивается на два этапа. На
первом этапе, являющемся тормозным,
законы изменения и
М описываются теми же уравнениями что
и при активном Мc.
Время торможения до
 , где - с-
фиктивная скорость, к которой стремиться
двигатель.
, где - с-
фиктивная скорость, к которой стремиться
двигатель.
На
втором этапе происходит разгон в
противоположном направлении (после
торможения противовключением и
остановки). Знак Мс
меняется на противоположный. Уравнения,
описывающие переходный процесс будут
иметь такой же вид, как для пуска
двигателя, только нач
нужно
принять равной 0, Мнач=-Мп
и с=-с`,т.е.
 ;
;


Здесь Мп- пусковой момент.
Время
реверса
 .
При переходе скорости через 0 динамический
момент Мдин
скачком изменяется от значения
Мдин=-(Мп+Мс)
до Мдин=-(Мп-Мс)
, что вызывает соответствующее изменение
ускорения и в кривых =f(t)
и M=f(t)
появляется излом.
.
При переходе скорости через 0 динамический
момент Мдин
скачком изменяется от значения
Мдин=-(Мп+Мс)
до Мдин=-(Мп-Мс)
, что вызывает соответствующее изменение
ускорения и в кривых =f(t)
и M=f(t)
появляется излом.
При динамическом торможении законы изменения и М описываются теми же уравнениями, что и для реверса, т.е.
 ;
;
 , где с-
установившаяся
, где с-
установившаяся
скорость, определяемая точкой пересечения механической характеристики динамического торможения и вертикали Мc =const.
В случае активного Мс точка “B”, соответствующая установившейся скорости с2, относится к случаю, когда этот момент в начале процесса является тормозным, что имеет место, например, при подъеме груза, а т. “c” с установившейся скоростью с1- к случаю, когда этот момент является движущим, например, при спуске груза (рис.а).
В
случае торможения при подъеме груза
под действием Мс
и тормозного момента двигателя привод
вначале будет тормозится и остановится,
т.к. момент двигателя станет равным 0,
но т.к. Мс
является активным и будет продолжать
действовать в том же направлении, под
его действием система будет вращаться
в обратную сторону. При этом Мс
из момента сопротивления (тормозного)
превратится в движущий, а тормозной
момент двигателя изменит свой знак и
будет продолжать действовать как
тормозной. Установившаяся скорость
наступит при равенстве момента двигателя
и Мс
т.е. в т. В. Кривые переходного процесса
для этого случая изображены на рис. “б”.
Время торможения до 0
, т.е.
до остановки 

Если активный момент сопротивления в начале торможения был движущим (торможение при спуске груза ), то в начале торможения тормозной момент двигателя (отрезок ED на рис.”а”) больше движущего статического момента и имеет место замедление, сопровождающееся уменьшением тормозного момента двигателя. При скорости с1 M=Mc, замедление прекращается и наступает установившийся режим тормозного спуска груза со скоростью с1. В этом случае затормозить систему до остановки путем динамического торможения нельзя (рис.”в”).
При
реактивном моменте сопротивления
динамическое торможение происходит
так же, как и при подъеме груза. Разница
лишь в том, что при =0
действие реактивного Мс
прекратится, и т.к. момент двигателя
тоже станет равным 0, система остановится.
Соответствующие этому случаю механические
характеристики и кривые =f(t)
и М=f(t)
изображены на приведенных рис. Процесс
будет протекать так, как если бы скорость
стремилась
стать равной-с
, но
прекратится при =0.
Поэтому соответствующие отрезки кривых
на графике изображены пунктиром.
В заключение следует отметить, что процессы пуска и торможения в электроприводах, получающих питание от сети ( =const) отличаются от оптимальных.
Переходные процессы электропривода с линейной механической характеристикой при Мс=f()
В случае линейной М от , т.е. при Мс=к дифференциальное уравнение, определяющее переходный процесс, имеет вид
 , где
, где
y- скорость установившегося режима при Мс=Мy ,
y- падение скорости при установившемся режиме .
Учитывая,
что y+y=0
и умножая обе части уравнения на
 ,
получим
,
получим 

откуда
 ,где
,где

Решение этого уравнения относительно и М дает законы изменения , М и I
 ;
;


Длительность
переходного процесса

Т`м- это время, за которое электропривод разгонится из неподвижного состояния до y при постоянном Мпуск.
При
Мс=М0+К1(рис.”a”)
и Мс=М0-К1(рис.”б”)
переходный процесс описывается этими
же уравнениями, что и при Мс=К,
но в них


При вентиляторном моменте сопротивления дифференциальное уравнение, отражающее переходный процесс, имеет вид
Хотя это уравнение решить можно, однако конечные результаты мало пригодны для практического использования.Поэтому на практике чаще используются графические и графоаналитические методы. Естественно, что такие методы дают лишь приближенные результаты, однако, при тщательном выполнении их точность достаточна для решения практических задач. Правда, такие методы имеют и такой недостаток: они не дают возможности получить общие выводы. Решение может быть найдено лишь для отдельных частных случаев, когда значения всех параметров электропривода известны. Рассмотрим некоторые из них.
-
Ограничение ускорения в системе подчиненного регулирования координат с ПИ-регулятором скорости, динамические характеристики.
Структурная схема системы с ПИ-регулятором скорости представлена на рис. 23.1. ПИ- регулятор момента с коэффициентом передачи Кп1 и временем изодрома Ти1 представлен на рис.23.1 детализированной структурной схемой. Аналогично представлен ПИ-регулятор скорости с коэффициентом передачи Кп2 и временем изодрома Ти2 Через eps1 и eps2 обозначены ошибки соответственно на входах контуров регулирования момента и скорости. Выходное напряжение uзад(м) регулятора скорости является задающим для подчиненного контура регулирования момента.

Математическая модель системы содержит 5 уравнений состояния
Tпр dw0/dt= - w0 +Kпр uу
Tэ
 = bw0 - M- bw1,
= bw0 - M- bw1,
JS
 =
M- Mc
=
M- Mc
 =
eps1
=
eps1
 =
eps2,
=
eps2,
где к известным переменным состояния, характеризующим энергети-ческую подсистему ЭМС, добавлены выходы интеграторов ПИ-регу-ляторов yp1 и yp2 , , характеризующие состояние информационной подсистемы.
Статические и динамические характеристики контура с такими настройками относительно задающего (управляющего) воздействия соответствуют характеристикам стандартной системы, настроенной на симметричный оптимум. Передаточная функция замкнутого контура по управлению имеет вид
 ,
,
или
 .
.
При этом
а) Контур не имеет статической и скоростной ошибки, относительно сигнала задания (система обладает астатизмом второго порядка по управлению). В литературе часто такую систему называют двукратно-интегрирующей.
б) Время переходного процесса по управлению составляет величину
tп @ 12Тm2 @ 24Тm1 @ 24Тпр ,
однозначно определяется величиной постоянной времени управляемого электрического преобразователя и в 4 раза превышает время переходного процесса в контуре регулирования момента.
в) Перерегулирование при отработке скачка задания контуром, настроенным на симметричный оптимум, составляет, как известно, величину 43%. Для уменьшения его до величины 8.3% на входе контура, в канале формирования сигнала задания устанавливается фильтр в виде апериодического звена с передаточной функцией
Wф(p)=uзад (p)/ uвх(p)= 1/ (Тфp +1),
причем постоянная времени фильтра выбирается из условия компенсации числителя передаточной функции замкнутой системы, т.е.
Тф= 4 Тm2 @ 8Тm1 @ 8Тпр.
Для учета такого фильтра математическую модель системы следует дополнить еще одним уравнением

Рассмотрим далее характеристики контура относительно возму-щающего воздействия (момента нагрузки Мс)
Преобразуя схему известным образом, получим

w1
Передаточная функция системы по возмущению
Wв(p)=

или с учетом выражения для коэффициента передачи ПИ-регулятора оптимизированного контура
Кп2 = КмТм b/ Кw4Тпр
Wв(p)=

Найдем операторное изображение ошибки контура Dw(p) в виде изменения скорости, обусловленного скачкообразным приложением момента статической нагрузки при нулевом задании по скорости и нулевых начальных условиях
Dw(p)
=
Находя установившееся значение ошибки в системе как
 ,
,
установим, что эта ошибка равна нулю при любом моменте нагрузки Мс , и следовательно, в пределах зоны пропорциональности УПП механические характеристики определяются выражением
w1=wзад
и по форме не отличаются от аналогичных характеристик одноконтурной системы регулирования скорости с ПИ-регулятором.
Для оценки характера процесса парирования скачкообразного возмущения определим переходную характеристику системы по возмущению, используя операторное изображение ошибки
Dw(t)
=
Корни полинома знаменателя выражения, заключенного в фигурные скобки, известны:
p1= -1/ 2Tm2=-1/4Tпр;
p2,3= -1/ 4Tm2 ±jÖ3/ 4Tm2=-1/ 8Tпр ±jÖ3/ 8Tпр
Используя формулу разложения, находим
 (23.1)
(23.1)
График полученной зависимости представлен на рис. 23. 4.
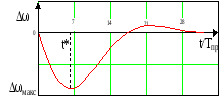
Рис. 23. 4
Анализ ее показывает, что время парирования возмущения равно времени переходного процесса по управлению, т.е. tп @24 Тпр и вдвое превышает время парирования возмущения в ранее рассмотренной системе с П-регулятором и настройкой на технический оптимум
Для приближенной оценки максимального значения динамического отклонения скорости Dwмакс заметим, что оно имеет место в момент времени t*@6 Тпр. Подставляя значение t* в формулу 23.1, получим
Dwмакс@ Dw(t*)@ 3.54 (Мс/J) Тпр
Настройка контура регулирования скорости на симметричный оптимум широко используется на практике в связи с простотой технической реализации и наличием астатизма первого порядка по возмущению. Однако, как было установлено, перерегулирование при реакции на скачок управляющего воздействия в 10 раз больше , чем в системе , с контуром скорости, настроенным на технический оптимум. Снижение величины перерегулирования без использования входного сглаживающего фильтра и при сохранении астатизма по моменту нагрузки. свойственного двукратноинтегрирующей системе, возможно в трехконтурной системе регулирования скорости.
-
Сравнительный анализ преобразователей частоты комплектных электроприводов.
На мировом рынке преобразовательной техники выделились следующие фирмы-лидеры: SIMENS, Shneider Electrique, Control Technique, ABB, Lenze которые выпускают КЭП переменного тока. Каждое новое поколение преобразователей частоты содержит всё большее число функций, как управляющих двигателем, так и улучшающих технологический процесс. В основном это функции:
— обеспечения необходимых тахограмм разгона и торможения;
— регулирование скорости в установившемся режиме;
— прецизионные задания скорости и ускорения;
— обеспечение реверса;
— автонастройки преобразователя;
— обработка сигналов обратных связей, заводимых в систему управления;
— организация контуров управления;
— защиты преобразователя от токовой перегрузки;
— реализация алгоритмов энергосбережения;
— реализация различных принципов управления (частотно-токовое, векторное, прямое управление моментом);
— визуализации сигналов;
— интеграции преобразователя в систему управления более высокого уровня (промышленную сеть);
— специальные технологические функции;
За счёт применения указанных функций, встроенных в современный КЭП, преобразователи фирмы Shneider Electrique нашли применение в следующих электроприводах:
— насосные агрегаты современных систем отопления (Altivar 21);
— системы вентиляции зданий и сооружений (Altivar 21);
— подъёмно-транспортное оборудование (Altivar 71);
— лифты (Altivar 71);
— фасовочно-упаковочное оборудование (Altivar 71);
— текстильные машины (Altivar 71);
Преобразователи фирмы Control Technique:
— металлургическая промышленность (Unidrive SP);
— крановые механизмы (Unidrive SP);
— лифты (Unidrive SP);
— насосы и вентиляторы (Commander SK);
— конвейеры (Commander SK);
— мешалки (Commander SK);
Как видно из назначения моделей разработанных и широко внедряемых КЭП, фирма-производитель выпускает КЭП ориентированно к группе или нескольким группам механизмов. Проблема унификации КЭП продолжает решаться. Однако унификация КЭП несёт и его удорожание с повышением стоимости, как силовой части, так и системы управления, увеличение габаритных размеров.
Таким образом, современная преобразовательная приводная техника, делает огромные шаги в своём развитии, постоянно совершенствуясь и тем самым повышая качество технологических процессов. Особенно важным при этом становится выработка новых подходов к её разработке и проектированию, с привлечением мощнейших вычислительных средств. Для постоянного совершенствования, необходимы научные исследования и обоснованные принятия решений, устраняющих возникающие проблемы.