Билет №42
.docxБ И Л Е Т № 42
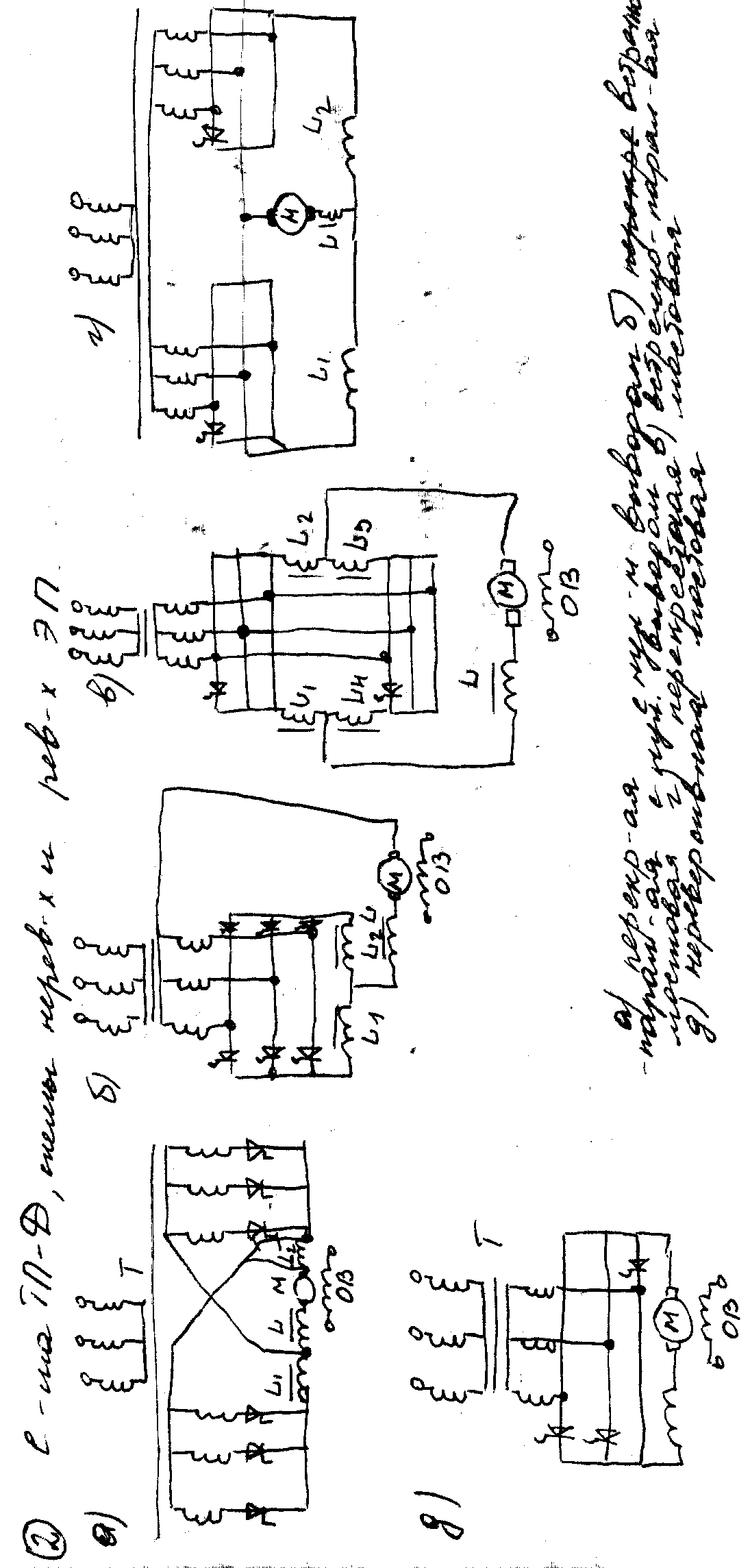
1. Система ТП-Д, схемы нереверсивных и реверсивных электроприводов.
2. Система скалярного управления асинхронным двигателем с обратной связью по скорости.
3. Особенности применения электропривода по системе АВК в механизмах центробежного типа, преимущества и недостатки
2. Система скалярного управления асинхронным двигателем с обратной связью по скорости.
Увеличение диапазона регулирования по
скорости АД возможно за счет применения
в системах управления электроприводом
отрицательной обратной связи по скорости.
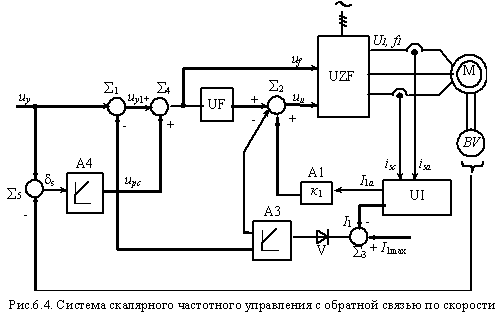
Функциональная схема подобной системы
дана на рис. 6.4. Здесь, к
каналам обратных связей по току АД,
используется канал отрицательной
обратной связи по скорости. Он включает
в себя тахогенератор BV,
как датчик обратной связи, узел
суммирования 5
сигналов управления скоростью АД
uу и обратной отрицательной
связи по скорости uос ,
регулятор абсолютного скольжения А4,
блок ограничения АQ его
выходного сигнала uрс
, а так же узел суммирования 4
сигнала uрс и
результирующего сигнала uу1
с выхода сумматора 1.
По мере увеличения нагрузки на валу АД
(моменты М1, М2 на
рис. 6.5) за счет уменьшения
скорости АД и, соответственно сигнала
uос , увеличивается сигнал
рассогласования s
= uу - uос
0.0
-
sa
, пропорциональный абсолютному скольжению
двигателя. Здесь: 0.0
- заданная скорость идеального холостого
хода АД, соответствующая исходному
сигналу управления uу ;
- реальная скорость АД при заданной
нагрузке на его валу. При s
0
сигнал uрс на выходе
регулятора скольжения, суммируясь с
сигналом uу1 = uу
(при I1
I1max
), за счет интегральной составляющей
передаточной функции регулятора А4
обеспечивает такое приращение сигнала
управления uf
преобразователем частоты, при котором
частота его выходного напряжения
становится равной f1.0
(1+sa).
Одновременно с изменением частоты за
счет функционального преобразователя
UF меняется по сравнению
с начальным U1.0
и выходное напряжение преобразователя
U1 (рис.
6.5, б). При этом скорость двигателя
восстанавливается до заданного значения
0.0
, т. е. обеспечивается абсолютная жесткость
механической характеристики АД (линия
1 на рис. 6.5, а). Для увеличения
перегрузочной способности АД по моменту
дополнительно к основному контуру
стабилизации скорости может быть
использован и канал положительной
обратной связи по току статора (устройство
А1 на рис. 6.4). 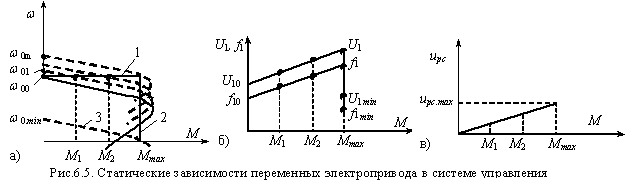
При превышении максимально допустимого тока статора АД (при I1 I1max и, соответственно, М М max), регулятор скольжения должен быть исключен из работы, например ограничением его выходного сигнала uрс на уровне uрс.max (рис. 6.5, в). При этом вступают в работу отрицательные обратные связи по току статора с регулятором А3, обеспечивая за счет одновременного уменьшения частоты и напряжения статора АД до их минимальных значений f1min и U1min ограничение момента АД при = 0 на уровне М max (линия 2 на рис. 6.5,а). При этом минимальная синхронная скорость двигателя 0.min будет соответствовать значениям f1min и U1min , а механическая характеристика линии 3 (рис. 6.5,а).
Устойчивость и динамические показатели качества регулирования скорости АД определяются выбором коэффициента пропорциональной и постоянной времени интегральной составляющих передаточных функций регуляторов А4 и А3.
3. Особенности применения электропривода по системе АВК в механизмах центробежного типа, преимущества и недостатки