

2.3 Лабораторная работа №3
Исследование интегрирующих и дифференцирующих звеньев
Цель работы: Математическое моделирование временных характеристик динамических звеньев. Изучение динамических свойств, частотных характеристик и оценка влияния параметров на свойства звеньев. Ознакомление с системами MATLAB и MathCAD. Применение этих систем для изучения динамических звеньев.
Программа работы
1. Математическое моделирование. Расчётно - экспериментальная часть
Ознакомиться с основами моделирования звеньев и систем управления с использованием пакета MATLAB-Simulink
По заданию преподавателя определить параметры звеньев и создать их модели
Расчёт временных характеристик исследуемых динамических звеньев:
Расчёт переходных функций h(t) и импульсных переходных (весовых) функций ω(t) динамических звеньев по методу структурного моделирования.
Аналитический расчет временных характеристик. Сравнить результаты расчета с моделированием.
Определение показателей переходных процессов исследуемых звеньев
Частотный анализ динамических звеньев с использованием пакета MATLAB-Simulink
Расчётно-графическая часть. Составление отчета по лабораторной работе
Представить цель и программу работы, содержание расчетно-экспериментальной части
Создаются модели динамических звеньев и задаются параметры этих звеньев
Приводятся соответствующие графики переходных функций h(t) и весовых функций w(t) рассматриваемых динамических звеньев
Производятся аналитический расчет временных характеристик h(t) и w(t) исследуемых звеньев. Сравнить результаты аналитического расчета с моделированием. Определяются показатели переходных процессов звеньев.
Приводятся результаты частотного анализа для динамических звеньев с использованием пакета MATLAB-Simulink, представляются временные характеристики, логарифмические частотные характеристики и комплексные частотные характеристики
Рассчитываются и строятся асимптотические ЛАЧХ L(w) и ЛФЧХ
 (w)
для заданных звеньев.
(w)
для заданных звеньев.
Сделать выводы по работе
Порядок выполнения лабораторной работы
Как и при выполнении лабораторной работы №2 предварительно необходимо ознакомиться с основными сведениями по работе с пакетом МATLAB-Simulink, и выполнить работу №1.
Определение параметров моделей звеньев
По данным задания определить параметры моделей следующих динамических звеньев.
Идеального интегрирующего (И)
![]()
Интегрирующего с замедлением
![]()
Пропорционально-интегрального (ПИ)
![]()
Пропорционально-дифференциального (ПД)
![]()
Рассматриваются два варианта ПД-звена:
а) дифференцирующего типа
![]()
б) интегрирующего типа
![]()
Реального дифференцирующего (Д)
![]()
Расчёт временных характеристик исследуемых звеньев
Исследование временных характеристик динамических звеньев по методу структурного моделирования
Для структурного моделирования используем систему MATLAB, основные методы работы с которой были рассмотрены ранее. Открывается программа MATLAB. В основном окне программы запускается библиотека Simulink. Создаётся новая модель. При создании моделей динамических звеньев используются следующие блоки Simulink.
1. Генератор ступенчатого сигнала Step из раздела Sources - источники сигналов (см. Л.р. №1).
Назначение: формирует ступенчатый сигнал.
2. Блок передаточной функции Transfer Fcn из раздела Continuous – аналоговые блоки(см. Л.р. №1).
Назначение: блок передаточной характеристики Transfer Fcn задает передаточную функцию в виде отношения полиномов:
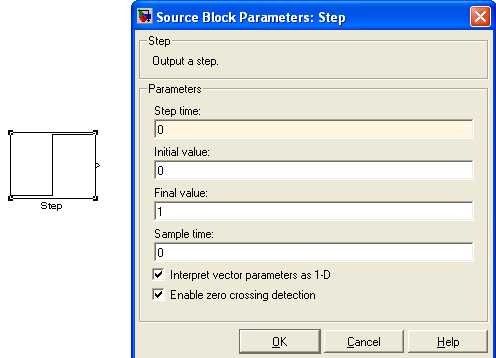
Рис. 3.1 Блок, моделирующий генератор ступенчатого
сигнала, и окно редактирования параметров блока
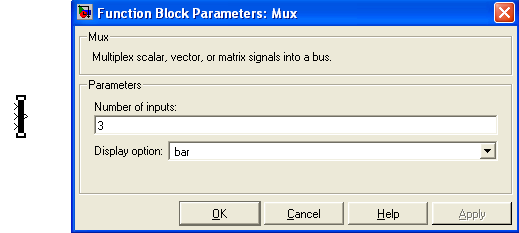
Рис.3.2 Блок мультиплексора и окно
редактирования параметров блока
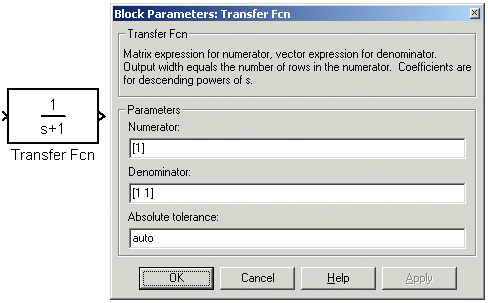
Рис. 3.3 Блок, моделирующий передаточную функцию и окно
редактирования параметров блока
3. Осциллограф Scope из раздела Sinks - приемники сигналов(см. Л.р. №1).
Назначение: строит графики исследуемых сигналов в функции времени. Позволяет наблюдать за изменениями сигналов в процессе моделирования.
4. Мультиплексор (смеситель) Mux из раздела Signal Routing (см. Л.р. №2).
Назначение: объединяет входные сигналы в вектор.
5. Генератор сигнала Signal Builder – из раздела Sources – источники сигналов(см. Л.р. №2).
Назначение: формирует один из трёх видов сигналов.
Указанный сигнал, например, используется при расчёте на ПК импульсных переходных(весовых) функций динамических звеньев.
6. Переходные функции
Для моделирования переходных функций используются три типа блоков. Первый – Step этот блок формирует единичный импульс. Второй – Transfer Fсn задаёт передаточную функцию звена. Третий – Scope осциллограф, выводящий график переходной функции. Если сигналов несколько, как при пропорционально-интегральном, то используется ещё блок - Mux.
Исследование временных характеристик интегрирующих звеньев