

3) Динамическое торможение.
Чтобы
перевести машину в режим динамического
торможения якорь отключают от сети и
замыкают на добавочное сопротивление
![]() .
Обмотка возбужденияLM
должна оставаться подключенной к сети
(см. рис. 2.22).
.
Обмотка возбужденияLM
должна оставаться подключенной к сети
(см. рис. 2.22).
М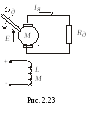 ашина
в этом случае работает в режиме генератора.
Механическая энергия, поступающая со
стороны вала, преобразуется в электрическую
и выделяется в виде тепла в сопротивлениях
цепи якоря. Следовательно, режим не
экономичен. Уравнение механической
характеристики несложно получить из
(2.16), приняв
ашина
в этом случае работает в режиме генератора.
Механическая энергия, поступающая со
стороны вала, преобразуется в электрическую
и выделяется в виде тепла в сопротивлениях
цепи якоря. Следовательно, режим не
экономичен. Уравнение механической
характеристики несложно получить из
(2.16), приняв![]() :
:
![]() .
.
Откуда для тормозного момента двигателя получим
![]() .
.
Из
этого соотношения следует: во-первых,
момент становится тормозящим
(отрицательным); во–вторых, момент
возрастает с увеличением скорости
![]() ;
в третьих, тормозной момент при
отрицательном значении
;
в третьих, тормозной момент при
отрицательном значении![]() тем больше, чем меньше
тем больше, чем меньше![]() (см. характеристики 3,4 на рис. 2.22).
(см. характеристики 3,4 на рис. 2.22).
Динамическое
торможение используется, в частности,
в подъемных механизмах при спуске
грузов. Например, при работе двигателя
на характеристике 3 (см. рис. 2.21) и моменте
![]() ,
создаваемым грузом, будет происходить
спуск груза со скоростью, определяемой
т. f.
,
создаваемым грузом, будет происходить
спуск груза со скоростью, определяемой
т. f.
Кроме
того, динамическое торможение широко
используется для быстрой остановки
двигателя. Для этого с помощью схемы
управления якорь двигателя отключают
от сети и замыкают на добавочное
сопротивление. Эффективность торможения
здесь ниже, чем в режиме противовключения,
т.к. по мере снижения
![]() уменьшается и тормозной момент.
уменьшается и тормозной момент.
2.3. Автоматическое управление угловой скоростью и током якоря дпт нв в замкнутых системах электропривода
2.3.1. Регулирование угловой скорости в системе уп-дпт нв с отрицательной обратной связью по скорости и отсечкой по току якоря
Как отмечалось в разделе выше, для обеспечения большего диапазона регулирования скорости целесообразно осуществляет регулирование д изменением напряжения на якоре. В простейшей схеме (см. рис. 2.16) диапазон регулированиядограничен падением скорости под нагрузкой. Этот недостаток устраняется использованием замкнутых систем с отрицательной обратной связью по угловой скорости. Функциональная схема такой системы приведена на рис. 2.23. Она содержит двигательМ, выходной величиной которого является угловая скоростьд; управляемый преобразовательУП, создающий регулирующее воздействиеUяна двигатель; усилительУ, на входе которого сравниваются
н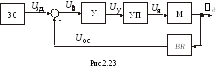 апряжениеUзди
напряжение обратной связиUос.
НапряжениеUздсоздается задатчиком скорости (ЗС).
апряжениеUзди
напряжение обратной связиUос.
НапряжениеUздсоздается задатчиком скорости (ЗС).
В качестве задатчика обратной связи используется тахогенератор br, напряжение на выходе которогоUоспропорциональнод.
На выходе узла сравнение сигналов (на схеме узел показан в виде окружности) формируется напряжение ошибки
![]() .
(2.30)
.
(2.30)
Как известно из теории автоматического управления, в замкнутой системе обеспечивается стабилизация регулируемой переменной – в данном случае д.
Напомним, как протекает этот процесс. Если, например, под действием нагрузки дначинает снижаться, то уменьшаетсяUос, а напряжениеU, в соответствии с выражением (2.30), начинает увеличиваться. При этом возрастает напряжение на выходе усилителяUуи якоре двигателяUя. В результате угловая скорость стремится к заданному значению. Несложно убедиться, что в случае возрастанияд, действие обратной связи приведет к снижениюUя, и угловая скорость вновь будет стремиться к заданной.
Т аким
образом в замкнутой системе удается
получить механические характеристики
близкие к абсолютно жестким (см. рис.
2.24 участок характеристики для
аким
образом в замкнутой системе удается
получить механические характеристики
близкие к абсолютно жестким (см. рис.
2.24 участок характеристики для
![]() )и обеспечить достаточно малые значения
нижней скоростин.
Иными словами, в такой схеме удается
реализовать большой диапазон регулирования
скорости.
)и обеспечить достаточно малые значения
нижней скоростин.
Иными словами, в такой схеме удается
реализовать большой диапазон регулирования
скорости.
Упрощенная принципиальная схема рассматриваемой системы приведена на рис. 2.25. Датчиком скорости в схеме является тахогенератор BR– машина постоянного тока с возбуждением от постоянных магнитов, вал которой механически соединен с валом двигателяМ. МашинаBRработает в режиме генератора, и ее ЭДС – напряжение обратной связиUос, в соответствии с уравнением (2.13), пропорциональнод.
Сравнение электрических сигналов в современных схемах осуществляется на входе операционного усилителя DА. На его инвертирующий вход через резисторR1подается напряжение заданияUзд, снимаемое с потенциометраRP(задатчика скорости), а черезR2напряжениеUос.
На входе усилителя происходит сравнение (вычитание) этих сигналов в соответствии с (2.30), а напряжение на выходе усилителя
![]() ,
,
где Ку– коэффициент усиления усилителя.
В цепь обратной связи операционного усилителя включен резистор R3, определяющий значениеКу.
Рассмотренные узлы и элементы схемы обеспечивают ее работу в режиме стабилизации скорости. Однако для нормальной работы электропривода этого недостаточно. Действительно, если произойдет, например, поломка механизма, порождающая возрастание момента статического сопротивления, то соответственно, будут нарастать ток якоря и момент двигателя. Недопустимое нарастание тока якоря возникает также при пуске двигателя и других переходных режимах.
Для исключения подобных ситуаций схема должна быть дополнена узлом ограничения тока якоря. Один из возможных вариантов реализации этого узла показан на рис. 2.25 (его также называютузлом токовой отсечки). Он включает датчик тока якоря – шунтRS, включенный в якорную цепь и стабилитроныVD1, VD2. СигналUостс шунтаRS может поступать на вход операционного усилителя черезVD1, VD2 и резисторR4.
Р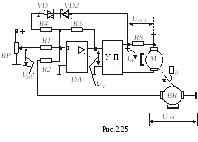 ассмотрим
работу схемы.
ассмотрим
работу схемы.
При проектировании схемы задаются значением тока отсечки Iотс. С учетом допустимой кратковременной перегрузки двигателя его обычно принимаютIотс=(2…2,5)Iном. Напряжение стабилизации стабилитронов выбирают
![]() .
.
Тогда
при токе якоря
![]() напряжение
напряжение![]() .
Для полярности напряженияUотс,
показанной на рис. 2.25, стабилитронVD1включен в обратном направлении. Его
сопротивление при
.
Для полярности напряженияUотс,
показанной на рис. 2.25, стабилитронVD1включен в обратном направлении. Его
сопротивление при![]() велико,
и напряжениеUотсне поступает на входDA.
В результате узел токовой отсечки при
токах
велико,
и напряжениеUотсне поступает на входDA.
В результате узел токовой отсечки при
токах![]() не оказывает влияния на работу схемы –
система работает в режиме стабилизации
скорости (1-ый участок на рис. 2.24).
не оказывает влияния на работу схемы –
система работает в режиме стабилизации
скорости (1-ый участок на рис. 2.24).
Если
же ток якоря превысит ток отсечки
![]() ,
то напряжение на шунтеUотсстанет большеUz.Сопротивление стабилитрона при этом
резко снизится (стабилитрон «пробьется»)
и на входDA будет
поступать дополнительный сигнал (
,
то напряжение на шунтеUотсстанет большеUz.Сопротивление стабилитрона при этом
резко снизится (стабилитрон «пробьется»)
и на входDA будет
поступать дополнительный сигнал (![]() ).
Этот сигнал вычитается из сигнала
задания, т.е. теперь сигнал ошибки будет
).
Этот сигнал вычитается из сигнала
задания, т.е. теперь сигнал ошибки будет
![]() .
(2.31)
.
(2.31)
Схема переходит в режим стабилизации тока якоря (2-ой участок на рис. 2.24). При возрастании токаIяувеличивается напряжениеUост, а сигнал ошибкиUуменьшается. Это ведет к снижению напряжения на выходе усилителяUу, уменьшается такжеUяид. В итоге двигатель останавливается.
В реверсивном электроприводе полярность напряжения на шунте изменяется, поэтому необходимо использовать 2 стабилитрона, включенных встречно.
Как следует из изложенного, в схеме для ограничения тока якоря используется отрицательная обратная связь по току якоря. В отличие от обратной связи по скорости, связь по току задержанная– она вступает в действие только тогда, когда ток якоря превышает ток отсечки.
Узел токовой отсечки обеспечивает ограничение тока якоря также в переходных режимах. Например, при пуске двигателя в начальный момент сигнал тахогенератораUос = 0, а сигнал ошибкиU, как следует из (2.31), значительно превышает установившееся значение. Поэтому напряженияUуиUяначинают интенсивно нарастать.
Поскольку ди ЭДС двигателя пока малы, ток якоря резко возрастает, и вступает в действие токовая отсечка. Следовательно, разгон двигателя идет при ограниченном значении тока (на рис. 2.24 процесс измененияIя при пуске условно показан стрелками).
По мере разгона двигателя д, ЭДС двигателя и сигнал обратной связи по скоростиUосвозрастают, а сигналU уменьшается. При подходе к заданной скорости ток якоря начинает спадать, и система переходит в режим стабилизации заданного значения скорости (например,вна рис. 2.24).
Таким образом, задержанная отрицательная обратная связь в электроприводе обеспечивает ограничение тока (момента) двигателя в переходных режимах и в ситуациях, связанных с недопустимым возрастанием момента сопротивления производственного механизма.