

2.3.6.7 Достоинства и недостатки электроприводов с управляемыми выпрямителями
Отметим основные особенности приводов, выполненных по схеме УВ – ДПТ НВ:
тиристорный преобразователь имеет очень малую инерционность, что позволяет обеспечить высокое быстродействие электропривода;
электропривод имеет высокую надежность, достаточно прост в обслуживании;
тиристорный электропривод имеет высокий КПД (более 95%);
малые габариты и масса, блочная компоновка привода позволяют сократить требуемые производственные площади, уменьшить капитальные затраты на установку.
В то же время, тиристорным электроприводам свойственны следующие недостатки:
1) значительные пульсации тока на выходе УВ увеличивают нагрев двигателя и ухудшают его коммутацию;
2) при глубоком регулировании скорости тиристорный электропривод имеет низкий коэффициент мощности;
3) перегрузочная способность тиристорного преобразователя ниже, чем генераторного;
4) при работе тиристорного привода искажается форма кривой напряжения в сети переменного тока и возникают помехи в сети, действующие как на другие электроприемники, так и на сам тиристорный привод;
5) в системе Г-Д преобразовательной установке свойственна естественная рекуперация энергии в сеть в генераторных режимах работы двигателя, в тиристорных преобразователях для обеспечения рекуперации необходимо применение специальных схем, в частности, с двумя комплектами вентилей, что повышает сложность и стоимость электропривода.
2.4. Механические характеристики и способы регулирования скорости двигателей постоянного тока последовательного и смешанного возбуждения
2.4.1. Электромеханические и механические характеристики дпт последовательного возбуждения (пв)
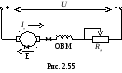
Схема подключения ДПТ ПВ приведена на рис. 2.55. В отличие от ДПТ независимого возбуждения здесь обмотка возбуждения ОВМ включена последовательно с якорем и через ОВМ протекает ток якоря Iя.
M
Исходные выражения для электромеханической, механической характеристик и момента ДПТ ПВ можно записать в том же виде, что и для ДПТ независимого возбуждения (см. уравнение (2.14)-(2.16)),
д
=
![]() ;д
=
;д
=
![]() ;
(2.47)
;
(2.47)
М = сФIя.
В отличие от ДПТ НВ в этих выражениях сопротивление Rявключает в себя и сопротивление обмотки возбуждения. Второе, наиболее важное отличие заключается в том, что магнитный потокΦ является функцией тока якоря. Зависимость магнитного потокаΦот тока не является аналитической кривой (см. рис. 2.56), что не позволяет получить аналитические выражения для электромеханической и механической характеристик ДПТ ПВ. Приведенные уравнения позволяет провести лишь качественный анализ.
Естественная электромеханическая и механическая характеристики двигателя показаны на рис. 2.56, рис. 2.57, кривые 1. Очевидно, что при Iя=0 магнитный поток также равен нулю, и угловая скорость за счет первого слагаемого в выражениях (2.47) стремится к бесконечности (как говорят двигатель идет «вразнос»), т. е. режим холостого хода для ДПТ ПВ является недопустимым.
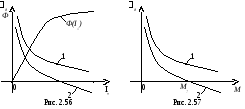
При возрастании тока якоря магнитный поток Фвначале растет примерно пропорционально току якоря, а скорость резко снижается (крутопадающий участок на характеристиках).
При больших токах двигатель работает в зоне близкой к насыщению. Поэтому его магнитный поток здесь мало меняется при изменении тока и характеристика становится более жесткой, приближаясь по виду к характеристике ДПТ НВ.
На практике для расчетов используют, так называемые, универсальные характеристики ДПТ ПВ, которые приводятся в каталогах.