

2.3.4 Регуляторы в системах эп
Как уже отмечалось, современные АЭП выполняются в виде замкнутых систем автоматического управления. При этом возникает задача обеспечения устойчивости замкнутой системы и требуемых показателей качества регулирования. Эти задачи решаются введением в систему операционных усилителей, охваченных определенными видами обратных связей. Такие усилители в системах автоматического регулирования принято называтьрегуляторами. Кроме того, на входе усилителя удобно осуществлять операцию сравнивания электрических сигналов. Схемасуммирующего усилителяприведена на рис. 2.30. На инвертирующий вход (на схеме помечен окружностью)DАусилителя подается: через резисторR1– сигнал заданияUзд; через резисторR2– сигнал отрицательной обратной связиUос(например, сигнал обратной связи по скорости двигателя). Известно, что динамические свойства операционного усилителя, охваченного обратной связью, приближенно можно описать передаточной функцией
![]() ,
(2.42)
,
(2.42)
где
![]() ,Zвх(p)– операторное сопротивление обратной
связи усилителя и входной цепи,
соответственно.
,Zвх(p)– операторное сопротивление обратной
связи усилителя и входной цепи,
соответственно.
Для
рассматриваемой схемы
![]() ,
для задающего сигналаZвх(p)=R1,
сигнала обратной связиZ1ос(p)=R2.
В результате передаточная функция
регулятора вырождается в коэффициент
передачи. Причем, еслиR1=R2,
то коэффициент передачи по обоим входам
усилителя один и тот же
,
для задающего сигналаZвх(p)=R1,
сигнала обратной связиZ1ос(p)=R2.
В результате передаточная функция
регулятора вырождается в коэффициент
передачи. Причем, еслиR1=R2,
то коэффициент передачи по обоим входам
усилителя один и тот же
![]() .
.
Напряжение на выходе усилителя
Uвых = UздKу – UосKу = (Uзд – Uос)Kу.
Последнему выражению соответствует алгоритмическая схема, представленная на рис. 2.31. Из нее следует, что рассматриваемая схема обеспечивает сравнение (вычитание) напряжений и усиление сигнала ошибки Uδ=Uзд – Uос. Приведенную схему (см. рис. 2.30) называютпропорциональным регулятором, или сокращенноП-регулятором.
R3 Uвых DA к1 Uзд Uос
R2 Рис.
2.30 Uзд(p) Uос(p) U(p) Kу Uвых(p) Рис.
2.31 R3 R1 R2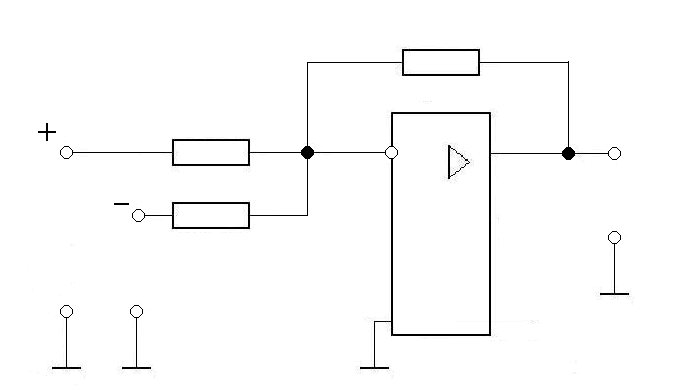








Для уменьшения статистической ошибки, как отмечалось выше, необходимо вводить в систему интегрирующее звено. Схема интегрального регулятора(И-регулятора) приведена на рис. 2.32 (для простоты считаем здесь и далееR1=R2). На основании выражения (2.42) несложно получить передаточную функцию регулятора
![]() ,
,
где Ти– постоянная времени интегрирующего преобразования.
Передаточная функция соответствует интегрирующему (астатическому) звену.
При скачкообразном изменении сигнала UнапряжениеUвыхлинейно нарастает (см. рис. 2.33). Учитывая свойства И-регулятора «накапливать» входной сигнал, можно дать следующие пояснение особенностям работы астатической системы. Если в системе появляется сигнал ошибки, то напряжение на выходе регулятора начинает изменяться и, соответственно, изменяется воздействие на двигатель. Этот процесс продолжается до тех пор, пока сигнал ошибки не будет сведен к нулю, т.е. пока не будет достигнуто равенство
Uос = Uзд.
В
Алгоритмическая схема регулятора приведена на рис. 2.34. И-регулятор обеспечивает сравнение сигналов UздиUос, а его выходное напряжение пропорционально интегралу от сигнала ошибки.
![]()
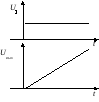
Рис.
2.32 Рис.
2.33
Uзд(p) U(p) Uвых(p)



![]()

С
Uос(p) Рис.
2.34
![]() ,
(2.43)
,
(2.43)
где T =R3C, Tи = R2С– соответственно, постоянные времени дифференцирующего и интегрирующего преобразования.
С
t t Uзд
- Uoc К R3





R1
Uвых
Uвых
Uзд
R2 Uос
DA Рис.
2.36
Рис.
2.35
Передаточную функцию (2.43) можно
исать и в другом виде. Деля почленн
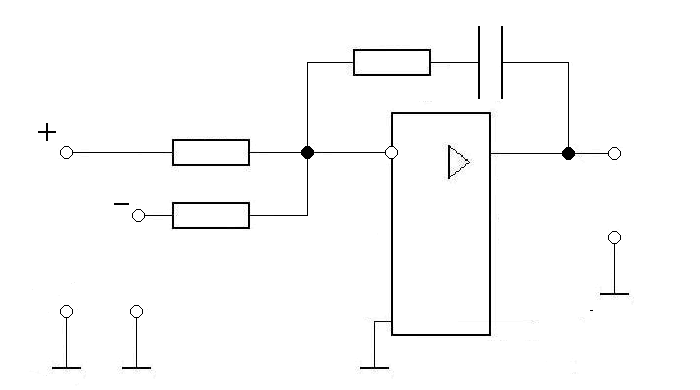
Выражение (2.43) можно записать и в другом виде, деля почленно числитель на знаменатель, получим
![]() ,
,
где K=T/Tи – коэффициент усиления пропорциональной части регулятора. Как следует из последнего выражения, передаточную функцию можно представить в виде суммы пропорциональной части (П) и интегральной (И) части. Отсюда название регулятора. Реакция ПИ-регулятора на скачкообразное изменение сигнала(Uзд - Uoc)приведена на рис. 2.36. Сравнивая рис. 2.34 и рис. 2.36, можно отметить, что ПИ-регулятор в первый момент времени более «энергично» воздействует на управляемый преобразователь и, соответственно, двигатель. Благодаря этому, в принципе, быстродействие системы может быть улучшено.
Схема пропорционально-интегрально-дифференциального регулятора (ПИД-регулятора) приведена на рис. 2.37. По сравнению с предыдущей схемой здесь добавлены емкостиС2иС3, включенные параллельно резисторамR1, R2. Иногда емкость включают только параллельноR2. Тогда для сигнала обратной связи схема имеет свойства ПИД- регулятора, а для сигнала задания – свойства ПИ- регулятора.
Используя выражение (2.42), передаточную функцию рассматриваемого регулятора можно записать в виде
![]() ,
(2.44)
,
(2.44)
где постоянные времени дифференцирования Т1, Т2 и интегрирования Ти определяются соотношениями:
Т1 = R3C1; T2 = R2C3; Tи = R2C1.