

ГЛАВА 2. МОДЕЛИРОВАНИЕ И ИДЕНТИФИКАЦИЯ ПРОЦЕССОВ И СИСТЕМ
Практическая значимость рассмотренных в первой главе методов теории систем, системных исследований, системного подхода, системного анализа заключается в создании и использовании моделей систем. Часто говорят, что теория систем – это фактически теория моделей систем, и это верно, поскольку любая деятельность человека, исследователя становится возможной благодаря моделям систем и использованию их в практической деятельности.
Однако качество и эффективность модели, возможность и успех ее использования в задачах управления и принятия решений определяется успехом решения задачи идентификации. Именно проблема идентификации занимает исключительно важную роль, поскольку является в настоящее время наиболее «узким местом» при проектировании наукоемких и интеллектуальных систем управления и принятии решений
вусловиях неопределенности [17–21].
Вэтой связи в данной главе в едином контексте рассматриваются модели процессов и систем и методы их идентификации, что в настоящее время является наиболее конструктивным подходом при решении задач управления и принятия решений.
2.1. Моделированиеиидентификациясистем
Понятие«модельсистемы»
Понятие «модель системы», выполняющей роль посредника между исследователем и средой, играет важную роль в проведении системных исследований. Модель есть средство осуществления любой деятельности субъекта (исследователя, ЛПР). Под моделью обычно понимается некий объект-заместитель, который в определенных условиях может заменять объект-оригинал, воспроизводя интересующие субъекта свойства и характеристики оригинала, имеющий существенное преимущество перед оригиналом [1–3].
Имеются два типа средств, из которых могут создаваться модели: материальные средства и средства мышления. В этой связи признано, что моделями могут служить не только реальные объекты, но и абстрактные, идеальные построения, типичным примером которых служат математические модели, которые принято классифицировать как:
37
1)статические;
2)динамические;
3)линейные;
4)нелинейные;
5)непрерывные;
6)дискретные;
7)детерминированные;
8)стохастические;
9)параметрические;
10)непараметрические.
Обычно используются комбинированные модели объектов исследования и управления, которые обладают рядом различных признаков. Например, статические и динамические модели могут быть линейными либо нелинейными, дискретными либо непрерывными, детерминированными либо стохастическими.
Принципиально различный характер в подходе к построению моделей имеют детерминированные, вероятностные, статические и динамические модели.
Детерминированные модели описывают поведение систем в условиях полной определенности состояний системы в настоящем и будущем.
Вероятностные модели описывают поведение системы в условиях воздействия на систему случайных неконтролируемых факторов, а также случайных переменных внутреннего состояния системы. Вероятностные модели дают возможность оценивать будущие состояния системы, с учетом действия случайных неконтролируемых факторов, с известными вероятностно-статистическими характеристиками. Широкое применение математических моделей в задачах системных исследований и управления обусловлено универсальностью подхода, способностью отразить всё разнообразие закономерностей исследуемых процессов, сокращением затрат по сравнению с аналогичными исследованиями на реальных объектах, а также принципиальной невозможностью проведения натурных исследований на ряде важных объектов.
Сложные динамические системы характеризуются выполняемыми процессами (функциями), структурой и поведением во времени. Для адекватного моделирования таких систем различают функциональные, информационные и поведенческие модели, пересекающиеся друг с другом. Функциональная модель системы описывает совокупность выполняемых системой функций, характеризует морфологию системы (ее построение) – состав функциональных подсистем, их взаимосвязи. Информационная модель отражает отношения между элементами системы в виде структур данных (состав и взаимосвязи). Поведенческая (событийная)
38
модель описывает информационные процессы (динамику функционирования), в ней фигурируют такие категории, как состояние системы, событие, переход из одного состояния в другое, условия перехода, последовательность событий.
Следует упомянуть основные области применения моделей, такие как обучение, научные исследования и управление. При обучении с помощью моделей достигается высокая наглядность отображения различных объектов и облегчается передача знаний о них. Это в основном модели, позволяющие описать и объяснить систему. В научных исследованиях модели служат средством получения, фиксирования и упорядочения новой информации, обеспечивая развитие теории и практики. В управлении модели используются для обоснования решений. Такие модели должны обеспечить как описание, так и объяснение, и предсказание поведения систем.
Создание модели требует соответствующей квалификации, знаний, опыта, четких представлений о моделируемых системах и процессах, закономерностях их поведения и факторов внешней среды. Особенность построения математической модели состоит в том, что реальная система упрощается, схематизируется и описывается с помощью того или иного математического аппарата. Имеют место следующие основные этапы построения моделей [1–3, 7, 20]:
1)содержательное описание моделируемого объекта;
2)формализация операций;
3)проверка адекватности и качества модели;
4)корректировка модели;
5)оптимизация модели.
На этапе содержательного описания объекты моделирования представляются с позиций системного подхода. В соответствии с целью исследования устанавливаются необходимая совокупность элементов, взаимосвязи между элементами, возможные состояния каждого элемента, существенные характеристики состояний и соотношения между ними. На этом этапе моделирования широко применяются качественные методы описания систем, знаковые и языковые модели.
Этап формализации операций сводится к содержательному описанию исходного множества характеристик системы. После выделения главных и исключения несущественных характеристик выделяют управляемые и неуправляемые параметры и производят символизацию. Затем определяется система ограничений на значения управляемых параметров. Дальнейшие действия связаны с формированием вектора показателей качества модели, составленного из частных показателей качества (показатели исхода операции, целевой функции, полезности и т. п.).
39
На этапе проверки адекватности и качества модели предварительно необходимо уточнить, все ли существенные параметры включены в модель, нет ли в м одели несущественных параметров (вопросы избыточности модели), верно ли отражены функциональные связи между параметрами и ограничения на значения параметров. Для выявления слабых сторон модели целесообразно привлекать экспертов, которые не принимали участия в разработке модели, что позволяет выявить грубые ошибки.
После этого целесообразно приступить к реализации модели и проведению исследований для установления соответствия создаваемой модели оригиналу, а именно сравнение результатов моделирования с отдельными экспериментальными результатами, полученными при одинаковых условиях, использование других близких моделей, сопоставление структуры и функционирования модели с прототипом.
Главным критерием проверки адекватности и качества модели исследуемому объекту выступает практика. Однако процедура проверки адекватности и качества модели требует соответствующих экспериментальных данных, статистики, объем которых не всегда бывает достаточным для получения надежных результатов. По результатам проверки модели на адекватность принимается решение о возможности ее практического использования или о проведении корректировки.
На этапе корректировки модели могут уточняться структура и существенные параметры модели, ограничения на значения управляемых параметров, показателей качества и эффективности. После внесения изменений в модель осуществляется возврат к этапу проверки адекватности и качества модели.
На этапе оптимизации модели осуществляется ее упрощение при заданном либо допустимом уровне потери ее качества и эффективности. Основными показателями оптимизации являются факторы времени и затрат. В основе оптимизации лежит возможность преобразования моделей; преобразование выполняется с использованием математических методов либо эвристическим путем.
Теорияизадачиидентификациисистем
Теория и практика идентификации систем имеет длительную историю развития: вначале идентификация систем развивалась в рамках кибернетики – науки об управлении сложными динамическими системами, затем рассматривалась как раздел теории управления, а в настоящее время идентификация процессов и систем выступает как самостоятельное научное направление системных исследований [17].
40
Следует отметить, что идентификация как направление системных исследований представляет наиболее конструктивный подход к решению задач проектирования наукоемких и интеллектуальных систем управления и принятия решений в условиях неопределенности.
Задачей идентификации систем, или просто идентификации, является построение оптимальной (в смысле заданных критериев качества) математической модели системы по результатам измерений входных и выходных переменных, т. е. построение формализованного математического представления системы.
Задачи идентификации принято различать в узком и широком смысле. В узком смысле задача идентификации состоит в оценивании параметров и состояния системы по результатам наблюдений над входными и выходными переменными. При этом известна структура системы и задан класс моделей, к которому данная система относится. При идентификации в широком смысле решаются такие задачи, как выбор структуры системы и задание класса моделей, оценивание степени стационарности и линейности системы, выбор информативных переменных и т. д.
Разработанные в 50–70 гг. XX в. методы идентификации, как в узком, так и широком смысле (здесь часто используют термины параметриче-
ская и структурная идентификация), основаны на методах математи-
ческой статистики, теории статистических решений, математических методах оптимизации. В настоящее время широко известны классические методы идентификации: метод наименьших квадратов, максимального правдоподобия, метод стохастической аппроксимации и т. д. [17, 20–22, 25–27].
Однако использование классических методов идентификации при решении практических задач часто связано с проблемой устойчивости решений. Действительно, в реальных условиях функционирования стохастических объектов исходная информация о модели объекта, статистических характеристиках помех, как правило, неточная, и в распоряжении исследователя имеется ограниченный набор экспериментальных данных, заданный в виде одной ограниченной реализации процесса. В данных условиях приведенные выше классические методы идентификации часто оказываются неустойчивыми и неработоспособными.
В этой связи в 60–90 гг. XX в. интенсивное развитие получили методы устойчивого (робастного) оценивания и идентификации систем, основанные на использовании различной дополнительной априорной информации о решении, статистических характеристиках помех и т. п. Наиболее известные устойчивые (стабильные) алгоритмы идентификации сводятся, по существу, к вероятностно-статистическим методам
41
(робастный метод максимального правдоподобия, метод максимума апостериорной вероятности, Байесовские методы и т. п.), методам решения некорректных задач Тихонова, методам условной оптимизации при наличии ограничений [30–32].
Разработаны и интенсивно разрабатываются в настоящее время методы идентификации в условиях непараметрической априорной неопределенности, опираясь на представлении процессов и систем в виде «черного ящика», когда исследователь располагает лишь общими сведениями о их структуре, такими, как ограниченность функций, их гладкость, существование производных, существование решений на интервалах и т. д. [23, 24, 28, 29, 33]. Здесь наиболее известными методами являются:
1)непараметрические методы идентификации регрессионного типа, основанные на непараметрических оценках плотности вероятности;
2)нейросетевые алгоритмы идентификации на основе искусственных нейронных сетей (наборах взаимодействующих преобразователей информации – нейронов);
3)нечеткие алгоритмы идентификации, основанные на нечетких множествах Л. Заде и дающие более широкие возможности их практического использования по сравнению с вероятностно-статистическим подходом.
В настоящее время возникло понимание важности интеграции разнородной информации, понимание того, что, наряду с моделями исследуемых объектов, должны существовать и находиться с ними во взаимодействии модели, представляющие накопленные знания, описывающие поведение аналогичных объектов, а также разнообразные дополнительные данные.
Понимание необходимости интеграции разнообразной информации
взадачах идентификации и управления сложными процессами и системами привело к созданию интегрированных моделей и системы идентификации, состоящих из согласованных моделей компонент, что позволило воспроизводить целостные, системные свойства реальных объектов и существенно повышать качество процедур идентификации, управления и принятия решений в условиях неопределенности [17, 18]. Важной компонентой интегрированной системы являются формализованные модели, учитывающие дополнительную априорную информацию, накопленный опыт и знания ЛПР.
Ценность интегрированных моделей и системы идентификации заключается в том, что они обеспечивают системное решение актуальных задач [17], а именно:
42

1) создание эффективных процедур учета разнородной дополнительной априорной информации, обеспечивающих согласованность исходных, дополнительных априорных данных, накопленного опыта
изнаний;
2)обеспечение устойчивости решений;
3)повышение помехоустойчивости и точности алгоритмов принятия решений при малом объеме исходных данных;
4)оптимизация решений прикладных задач идентификации, управления и принятия решений.
2.2. Математическиемоделипроцессовисистем
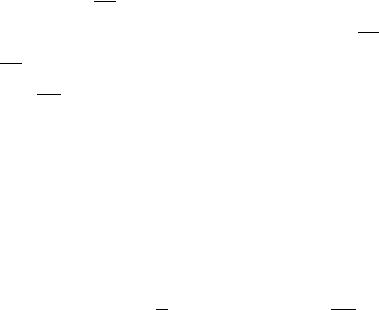
Объекты моделирования и идентификации – технические, экономические или социальные системы – удобно формально представлять в виде многополюсника со многими входами и выходами [25, 26], где через X = (x1, x2 , ..., xn ) обозначены входы объекта, а через
Y = (y1, y2 , ..., ym ) – реакции объекта на входные возмущения (рис. 2.1).
Х |
ξ |
|
|
|
|
Y |
||
|
|
|
||||||
|
|
|
|
|
||||
Объект, процесс |
||||||||
|
|
|
||||||
|
|
F |
|
|
|
|||
|
|
|
|
|
|
|
|
|
Рис. 2.1. Представление объекта и процесса идентификации
Входы объекта представляют собой воздействия внешней среды на объект и являются какими-то определенными функциями состояния среды и времени. Поскольку состояние среды никогда точно не известно, то входы и выходы объекта естественно рассматривать как случайные функции времени, статистические свойства которых в общем случае неизвестны. Однако обычно известны наблюдения входа и выхода, т. е. реализация функций X * (t) и Y * (t).
Объект связывает входы X*с его выходом Y*. Эту связь формально можно охарактеризовать некоторым оператором F0, таким, что
Y* = F0 (X *,ξ), |
(2.2.1) |
где ξ – неконтролируемые источники случайных возмущений. Поэтому под моделью объекта естественно также понимать неко-
торый оператор F, который преобразует наблюдаемое входное воздействие на объект X в его реакцию Y = F(X). При классическом подходе задача идентификации заключается в построении модельного оператора F из некоторого класса операторов по наблюдениям X* и Y*, который
43
был бы близок к F0 в смысле некоторого критерия оптимальности. Рассмотрим некоторые примеры видов операторов F и соответствующие им модели, наиболее часто используемые при решении практических задач, в т. ч. и задач идентификации и управления процессами нефтегазодобычи. Более детальные перечень и описание видов операторов и моделей объектов идентификации приведены в научных работах
[10, 15, 17–19, 20–22].
Статическиемодели
1. Линейные детерминированные модели. Модель линейного стати-
ческого объекта с n входами и m выходами описывается системой линейных алгебраических уравнений
m |
|
yi = ∑αij xj , i = 1, n, |
(2.2.2) |
j=1
или в векторной форме Y = AX , где Y = (y1, y2 ,..., yn )T – вектор-столбец
выходных переменных объекта в момент времени t; X = (x1, x2 ,..., xm )T – вектор-столбец входных переменных объекта в момент времени t; A = (αij , i = 1, n, j = 1, m) – матрица коэффициентов.
Задача идентификации системы (2.2) состоит в оценивании матрицы коэффициентов A.
2. Нелинейные параметрические модели (функции регрессии). Мо-
дель объекта в этом случае представляем в виде известной функции с неизвестными параметрами
y = f (x,α), |
(2.2.3) |
где у – выходная переменная объекта; f (x,α) – известная функция двух векторных аргументов x = (x1, x2 , …, xm ) – входа объекта и вектора не-
известных параметров α = (α1, α2 , …, αm ).
Задача идентификации сводится к определению параметров α на основе экспериментальных наблюдений.
Частным случаем параметрических моделей являются модели, линейные относительно оцениваемых параметров. Такие модели образуются в результате разложения искомой функции по заданной системе
k
функций f (x,α) = ∑α jϕ j (x), где ϕ j (x) – система векторных линейно
j=1
независимых функций. Частным случаем такого представления является аппроксимация функции f (x,α) отрезком многомерного ряда Тейлора.
44
Отметим преимущества использования нелинейных моделей объектов:
1)нелинейность является существенным свойством большинства реальных объектов;
2)дополнительная информация часто позволяет выбрать достаточно точную нелинейную модель с числом параметров значи-
тельно меньше, чем для аналогичной линейной модели. Приведем примеры практического использования нелинейной рег-
рессионной модели объекта.
3. Модель производственных функций
y = f (x,α) = α0 x1α1 x2α2 ,..., xmαm ,
где y – результат производства (объем дохода); x1, x2 , …, xm – затраты, факторы производства (капитала, труда, информации, технологии ит. д.).
Параметры α1, α2 , …, αm отражают влияние факторов x1 , x2 ,..., xm на результат y.
4. Функция регрессии в задаче медицинской диагностики
f(t,α) = α1 + α2 exp(−α4t).
α3
Данная функция описывает изменение содержания сахара в плазме крови человека после «нагрузки» глюкозой. Используется в алгоритмах ранней диагностики заболеваний сахарным диабетом.
5. Функция регрессии в задаче интерпретации гидродинамических исследований скважин нефтяного месторождения
f (t,α) = α + α ln(α t + α ) .
1 2 3 4
Данная функция описывает изменение забойного давления нефтяных скважин после их остановки в целях определения фильтрационных параметров нефтяной залежи.
6. Функция регрессии в задачах прогноза добычи нефти и оценки извлекаемых запасов
f (t,α) = α1tα2 exp(−α3t ).
Данная зависимость является простой моделью, отражающей изменение добычи нефти в процессе разработки нефтяного месторождения. Используется для прогноза добычи нефти и оценки извлекаемых запа-
сов флюидов [17]: S = T∫ f (t,α)dt, где Т – время окончания разработки
0
нефтяного месторождения.
45
7. Статические стохастические модели. Статический стохастиче-
ский объект в общем случае описывается функцией вида
Y = F ( X ,ξ), |
(2.2.4) |
где F – оператор объекта, ξ – случайные неконтролируемые факторы (помехи), порожденные либо самим объектом, либо средствами сбора и передачи информации.
Обычно предполагается, что помехи аддитивные, т. е. регулярная и случайная составляющая выхода могут быть разделены:
Y = F ( X ) + ξ. |
(2.2.5) |
Статистические свойства случайной составляющей ξ в общем случае зависят от контролируемого входа X. Модель объекта часто представляется в виде нелинейной многомерной функции регрессии вида
Y = F (x), |
(2.2.6) |
которая не зависит от неконтролируемой случайной составляющей ξ.
8. Непараметрические стохастические модели. Непараметриче-
ские статические стохастические модели описываются функцией, относительно которой известны лишь достаточно общие сведения, такие как непрерывность, ограниченность, существование производных и т. д. При данных априорных предположениях в качестве модели объекта часто используют функцию регрессии (условное математическое ожидание)
y = f (x) = ∫ yP( y / x)dy, |
(2.2.7) |
R1 |
|
где P( y / x) – условная плотность вероятности выхода объекта.
Задача идентификации в данном случае заключается в оценке условной плотности вероятности и функции регрессии на основе наблюдений входа и выходов объекта.
Динамическиемодели
В качестве математического описания динамических объектов наиболее часто используют интегральные уравнения, обыкновенные дифференциальные уравнения, дифференциальные уравнения в частных производных, конечно-разностные, дискретные аналоги интегральных
идифференциальных уравнений:
1.Динамические системы на основе интегральных уравнений.
Модель линейного динамического объекта, на вход которого поступает
сигнал x(t) , вызывающий реакцию y(t), часто представляют в виде интегрального уравнения
46
y (t) = ∫t |
h(t, τ) x (τ)dτ, |
(2.2.8) |
−∞ |
|
|
где h(t, τ) – импульсная переходная функция (ИПФ) системы, |
h(t,τ) = 0 |
|
при t < τ. |
h(t,τ) = h(t − τ) уравнение (8) |
|
В стационарном случае |
переходит |
|
в интегральное уравнение свертки |
|
|
t |
∞ |
|
y(t) = ∫ h(t − τ) x(τ)dτ = ∫h(τ) x(t − τ)dτ. |
(2.2.9) |
|
−∞ |
0 |
|
Задача идентификации заключается в определении импульсной переходной функции (ИПФ) объекта h(t,τ) либо h(τ).
Наряду с описанием линейного объекта с помощью ИПФ можно использовать его описание с помощью передаточной функции ϕ(t, p),
связанной с ИПФ соотношениями
∞ |
1 |
σ+ j∞ |
|
|
ϕ(t, p) = ∫ h(t,τ)e− pτdτ, h(t,τ) = |
∫ ϕ(t, p)epτdp. |
(2.2.10) |
||
2πj |
||||
−∞ |
σ− j∞ |
|
В стационарном случае ϕ(t, p) = ϕ(t − p).
Модель нелинейного динамического инерционного объекта строится в предположении, что нелинейность и инерционность объекта можно разделить и представить объект в виде последовательной комбинации двух звеньев: нелинейного безынерционного и динамического линейного. В одномерном случае, предполагая, что инерционное звено
стационарно, выход объекта y(t) связан с его входом x(t) одним из двух соотношений:
∞
y(t) = ∫h(τ)f x(t
0
− τ) dτ либо |
y(t) = f |
∞ h(τ) x(t − τ)dτ |
. (2.2.11) |
|
|
|
∫ |
|
|
|
|
0 |
|
|
Задача идентификации будет состоять в определении пары функций: h(t) и f (t).
2. Динамические системы, описываемые обыкновенными диффе-
ренциальными уравнениями. Модель линейного динамического объекта,
на вход которого поступает сигнал x(t ), |
вызывающий сигнал y(t), часто |
|||||||||
представляют в виде обыкновенного дифференциального уравнения |
||||||||||
a |
d n y |
+ ... + a |
dy |
+ a y = b |
dxm |
+ ... + b |
dx |
+ b x, |
(2.2.12) |
|
n dtn |
|
|
|
|||||||
|
1 dt |
0 |
m dtm |
1 dt |
0 |
|
||||
где di y(0) / dti |
= yi , i = 0, 1, …, n −1 – |
начальные |
состояние |
системы; |
||||||
|
|
0 |
|
|
|
|
|
|
|
|
n и m – параметры структуры (порядок) уравнения.
47

Если система нестационарная, то коэффициенты уравнения ai и bi должны быть функциями времени. Задача идентификации заключается
вопределении порядка уравнения, коэффициентов ai, bi и начальных состояний (если они неизвестны).
Класс моделей на основе интегральных и обыкновенных дифференциальных уравнений имеет свои преимущества и недостатки. Модели на основе дифференциальных уравнений могут приводить к большим ошибкам идентификации, если порядок модели не соответствует порядку объекта. Преимущество моделей на основе интегральных уравнений состоит в том, что они не требуют явного знания порядка объекта. Однако в этом случае описание объекта является непараметрическим, бесконечномерным, поскольку определение функции эквивалентно определению (заданию) бесчисленного числа параметров.
3.Нелинейные динамические модели. В непрерывном случае одно-
мерный динамический объект (один вход и один выход) может быть
впростейшем случае описан с помощью нелинейного дифференциального уравнения
yn (t) = f ( yn−1, …, y, xm , …, x), |
(2.2.13) |
где f – нелинейная функция n + m +1 аргумента, которую и нужно идентифицировать.
4. Динамические системы, описываемые дифференциальными уравнениями в частных производных. Динамические объекты, представ-
ленные дифференциальными уравнениями в частных производных, имеют чрезвычайно широкое научное и практическое применение при решении разнообразных задач гидротермодинамики, переноса излучения, прогноза погоды, динамики атмосферы и океана и т. д.
Дифференциальное уравнение с частными производными порядка r есть функциональное уравнение вида
|
|
∂f |
|
∂f |
|
∂f |
|
∂ |
2 |
f2 |
|
(2.2.14) |
F X , |
f , |
, |
, …, |
, |
|
, … = 0, |
||||||
∂x |
∂x |
∂x |
|
|
||||||||
|
|
|
|
|
∂x |
|
|
|||||
|
1 |
|
2 |
|
n |
|
|
|
1 |
|
||
содержащее по меньшей мере одну частную производную порядка r от неизвестной функции f ( X ) , где X = (x1, x2 , …, xn ).
В качестве примера рассмотрим дифференциальное уравнение параболического типа однофазной фильтрации, которое описывает плоскорадиальный приток сжимаемой жидкости к скважине нефтяного пласта,
∂P = ∂P + ∂2 P2 ,
χ∂t r∂r r∂r
48

где P – давление в момент времени t на расстоянии r от оси скважины; χ – коэффициент пьезопроводности пласта, который характеризует скорость перераспределения давления в пласте.
Задача идентификации заключается в определении пьезопроводности пласта по результатам гидродинамических исследований скважины
ирегистрации кривой изменения давления после остановки скважины.
5.Дискретные, конечно-разностные аналоги интегральных и диф-
ференциальных уравнений. При решении задач идентификации широкое
применение получили дискретные, конечно-разностные аналоги интегральных и дифференциальных уравнений с использованием численных методов.
Суть этих методов заключается в замене интегралов суммами, а производных – их конечными разностями. Это позволяет свести интегральные и дифференциальные уравнения к соответствующим системам сеточных алгебраических уравнений. Решение уравнений определяется в узлах сетки, что часто требует запоминания большого объема данных
ипроведения больших вычислений.
2.3.Методыидентификациисистем вусловияхнеполнойинформации
Рассмотрение методов идентификации систем в условиях неполной информации начнем с изложения основных классических методов идентификации статических объектов максимального правдоподобия и наименьших квадратов.
Постановказадачиидентификациистатическихобъектов
Пусть имеется модель статического стохастического объекта вида y = f (x,α) + ξ,
где x = (x1, x2 , …, xm ) – вектор входных величин; α = (α1, α2 , …, αm ) – вектор параметров модели объекта; y – выходная величина; ξ – случайная неконтролируемая переменная, представляющая погрешности изме-
рений (помех), ошибки, связанные с выбором модели вида f (x,α) и па-
раметров и т. п. Здесь y R1, ξ R1, x Rm , α Rm определены в соответствующих областях евклидового пространства.
Требуется по измерениям выходной и входных переменных (yi*,
xi , i = 1,n) оценить параметры α модели |
|
yi = f (xi ,α) + ξi , |
(2.3.1) |
49

где f (xi ,α) – известная с точностью до вектора параметров функция.
Будем предполагать, что ξi – |
независимые случайные величины |
||
с ограниченной дисперсией имеют одинаковую симметричную плот- |
|||
ность распределения вероятности |
pξ (z) = pξ (−z) , а ошибками измере- |
||
ний вектора входных переменных |
xi , i = |
|
можно пренебречь. Далее |
1,n |
|||
будет использована и другая дополнительная априорная информация относительно плотности pξ (z)и параметрах модели α.
Систему моделей (2.3.1) удобно представить в матричной форме
|
|
y* = f (α) + ξ, |
(2.3.2) |
||||
где y* = (yi*, i = |
|
)T , f (x) = ( f (xi ), i = |
|
),ξ = (ξ*i , i = |
|
)T – |
векторы- |
1,n |
1,n |
1,n |
|||||
столбцы значений выходной переменной, модели и случайных неконтролируемых факторов.
Методымаксимальногоправдоподобия инаименьшихквадратов
Предположим, что плотность распределения случайных величин pξ (z) известна, а априорная информация о решении полностью отсут-
ствует. Одним из наиболее распространенных методов идентификации в этой ситуации является метод максимального правдоподобия (ММП) [26, 27], который в данном случае принимает вид
|
|
n |
|
α* = arg min J = ∑ϕ(yi − f (xi ,α)) ,ϕ(z) = −log p(z). (2.3.3) |
|||
α |
|
i=1 |
|
В частности, если pξ (z) – плотность нормального распределения случайной величины ξ − N (0,σ2 )
pξ (z) = 2 1σ exp(−z2 / σ),
то ММП (2.3.3) переходит в метод наименьших квадратов (МНК):
α* = arg min |
n |
|
|
|
∑( yi − f (xi ,α))2 |
, |
(2.3.4) |
||
α |
i=1 |
|
|
|
а если pξ (z) – плотность распределения Лапласа – L(0,a)
pξ (z) = 21a exp(− z / a),
то из (2.3.3) получаем метод наименьших модулей (МНМ)
|
|
n |
|
|
|
αn = arg min J = ∑ |
yi − f (xi ,α) |
. |
(2.3.5) |
||
α |
|
i=1 |
|
|
|
50
Отметим, что для простейшего случая f (x,α) = α = const оценка
(2.3.4) совпадает с выборочным средним:
α* = 1 ∑n yi*, n i=1
а оценка (2.3.5) – с выборочной медианой:
α* = med (y1*, …, yn* ).
Следует также отметить, что в случае линейного статического объекта, представленного по аналогии с (2.3.2) в матричной форме,
y* = Fα + ξ |
(2.3.6) |
решение оптимизационной задачи (2.3.4) значительно |
упрощается |
и сводится к решению системы линейных алгебраических уравнений (СЛУ)
|
|
|
|
|
|
|
|
|
(FT F )α* = FT y*, |
|
(2.3.7) |
|||||||
|
f |
(x |
), |
|
f |
2 |
(x |
), |
, f |
m |
(x |
) |
|
|
|
|
||
|
|
1 |
11 |
|
|
|
12 |
|
|
|
1m |
) |
|
|
|
|
||
|
f |
(x |
), |
|
f |
2 |
(x |
), |
, f |
m |
(x |
|
|
|
|
|||
где |
F = |
1 |
21 |
|
|
|
22 |
|
|
|
2m |
|
– матрица известных функ- |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
f |
(x ), |
|
f (x ), |
, f (x ) |
|
|
|
|
|||||||||
|
|
|
n1 |
|
|
|
2 |
n2 |
|
|
|
m |
nm |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||
ций |
f (x) = f (x), |
f |
|
(x), …, f |
|
(x) в точках x , |
i = |
|
. |
|||||||||
2 |
m |
1,n |
||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|||
Оценки максимального правдоподобия (2.3.3) при некоторых предположениях асимптотически несмещенные, состоятельные и оптимальны в том смысле, что их среднеквадратическая ошибка аппроксимации при объеме выборки n → ∞, достигает минимально возможного значения,
совпадающего с нижней границей неравенства Рао–Крамера [31, 32]
|
|
M (α* − α)(α* − α)T ≥ 1 |
(Bn I ( p))−1 ; |
||||
|
|
|
2 |
|
|
n |
|
∞ |
|
|
|
|
n |
|
|
I ( p) = ∫ |
dpξ (z) / dz |
|
dz, |
Bn = |
1 ∑ α f (xi ,α* ) Tα f (xi ,α* ), |
||
|
|
||||||
−∞ |
|
pξ (z) |
|
|
|
n i=1 |
|
где M – символ математического ожидания; I ( p) – фишеровская информация. Предполагается, что I ( p) существует и конечна, а матрица Bn невырождена.
Оценки МНК (2.3.7)
α* = (FT F )−1 FT y* |
(2.3.8) |
обладают оптимальными свойствами при конечном объеме выборки n, и в классе линейных несмещенных оценок их дисперсия достигает
51
минимально возможного значения, что, в частности, обусловливает их широкое применение при решении практических задач.
Однако своеобразной «платой» за оптимальность оценок максимального правдоподобия и наименьших квадратов являются их неустойчивость, нестабильность при нарушении комплекса условий их нормального функционирования [17, 18, 27], а именно нормальности распределений вероятностей случайных факторов, ограниченность их дисперсий, отсутствие ошибок измерений входных переменных, невы-
рожденности матрицы FT F и т. п. Следует отметить, что обеспечить выполнение отмеченных выше условий нормального функционирования при решении многих задач идентификации и управлении процессами нефтегазодобычи в условиях неопределенности практически невозможно. Например, если плотность вероятности распределений помехи ξ равна
pξ (z) = (1− α) f (z) + αϕ(z),
где f (z) – гауссова плотность, ϕ(z) – плотность распределения с бес-
конечной дисперсией (модель, учитывающая выбросы, резко выделяющихся значения от основной массы наблюдений), то выборочное среднее имеет бесконечную дисперсию, а оценки (2.3.3), (2.3.4), (2.3.7) в этом случае не только не оптимальны, но даже не состоятельны, хотя функция распределения помехи близка к нормальному распределению
(0 < α ≤1).
Другим примером неустойчивости оценок ММП, МНК является
вырожденность либо плохая обусловленность матрицы FT F при малом объеме исходных данных n , когда размерность вектора оцениваемых параметров m > n. В данном случае определитель матрицы равен нулю, что нетрудно наглядно представить, если задача идентификации заключается в определении параметров уравнения прямой, проходящей через одну точку (n = 1, m = 2).
Устойчивыйметодмаксимальногоправдоподобия
Рассмотрим устойчивый метод максимального правдоподобия, предполагая, что известен лишь некоторый класс плотностей распределений вероятностей случайных факторов, помех P, p P [32]. В данном
случае, по аналогии с ММП, имеют место оптимальные приближения вектора неизвестных параметров
|
|
n |
|
|
α* = arg min J = ∑ϕ* (yi − f (xi ,α)) ,ϕ* (z) = −log p* (z); |
(2.3.9) |
|||
α |
|
i=1 |
|
|
52
p* = arg min I ( p),
p P
где p* – наиболее благоприятное распределение из класса P, обеспечивающее минимально возможное значение фишеровской информации
I ( p) |
|
( |
p* |
) |
p |
|
Типичными примерами часто используемых |
I |
|
|
= min I ( p) . |
||||
|
|
|
|
|
|
|
|
классов распределений помех являются невырожденные распределения, распределения с ограниченной дисперсией, «приближенно нормальные» распределения, «приближенно равномерные» распределения ит. п.
Например, для класса всех невырожденных распределений наиболее благоприятное распределение p* совпадает с распределением Лапласа
ϕ* (z) = z и метод (2.3.9) совпадает с методом наименьших модулей (2.3.5). Для класса распределений с ограниченной дисперсиейϕ* (z) = z2 метод (2.3.9) сводится к методу наименьших квадратов.
МетодмаксимумаапостериорнойвероятностиБайеса
Используя априорную информацию о решении, в данном случае информацию о распределении pа (α) вектора параметров α и формулу
Байеса
p(α / y) = p(α, y() p) (α),
p y
нетрудно [по аналогии с оценками (2.3.3)] получить оценки метода мак-
симума апостериорной вероятности (МАВ) |
|
p(α / y), |
которые удобно |
||||
представить в виде |
|
|
|
(α) + J |
|
(α) ; |
|
α* = argmin Ф = J |
0 |
a |
(2.3.10) |
||||
α |
|
|
|
|
|
||
n |
|
|
|
|
|
|
|
|
|
ϕ(z) = −log p(z), Ja (α) = log pa (α). |
|||||
J0 (α) = ∑ϕ yi − f (xi ,α) , |
|||||||
i=1
Приведем для примера решение задачи (2.3.10) для линейного статического объекта (2.3.6), когда случайные величины ξ независимы,
имеют нормальное распределение N (0,σξ2 )с нулевым средним и дисперсией σξ2 , а случайные величины α независимы, имеют нормальные распределения N (α j ,σ2a ) со средними значениями Mα j = α j , j = 1,m
и дисперсией σ2a . В данном случае оценка метода максимума апостериорной вероятности (3.10) примет вид
53

α* = arg minα ( |
|
y* − Fα |
|
2 + βn |
|
|
|
α − |
|
|
|
|
|
2 ), |
(2.3.11) |
|
|
|
|
α |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
где x 2 означает квадратичную норму вектора x, а βn = σξ . nσα
Нетрудно показать, что решение оптимизационной задачи по определению оптимальных оценок α* (2.3.11) сводится к решению системы линейных уравнений вида
(FT F + βn I )α* (βn ) = (FT y* + βn |
|
). |
(2.3.12) |
α |
Отметим, что при βn = h, α = 0 метод максимума апостериорной ве-
роятности приводит к решению регуляризованной по А.Н. Тихонову системы линейных уравнений с параметром регуляризации h, определение которого является самостоятельной задачей [30, 31].
Преимущество оценок (2.3.12) при конечных объемах данных n заключается в обеспечении невырожденности матрицы (FT F + βn I )
в случае вырожденности либо плохой обусловленности матрицы F T F. Недостатком оценок (2.3.12) является их смещенность при конечных объемах исходных данных.
МетодрегуляризациипоА.Н.Тихонову
Задача идентификации статического объекта (2.3.1) с использованием метода регуляризации А.Н. Тихонова заключается в решении оптимизационной задачи вида [30, 31]
α* (h) = arg min( |
|
y* − f (α) |
|
|
|
2 |
+ hΩ(α)), |
(2.3.13) |
|
|
|
||||||
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Ω(α) – стабилизирующий функционал, |
который часто называют |
|||||||
сглаживающим, h – параметр регуляризации (сглаживания). Выбор стабилизирующего функционала Ω(α) определяется видом модели иссле-
дуемого объекта и наличием априорной информации о решении, «гладкости» решения, уклонении решения от начала координат и т. п.
Например, при Ω(α) = 
 α
α
 2 определение оптимальных значений параметра α* (h) для линейного статического объекта сводится к решению регуляризированной СЛУ вида
2 определение оптимальных значений параметра α* (h) для линейного статического объекта сводится к решению регуляризированной СЛУ вида
(FT F + hI )α* (h) = FT y*.
Нетрудно видеть, что при параметре регуляризации h = 0 оценка α* (0) совпадает c оптимальной оценкой МНК (2.3.8). Отметим, что при
h > 0 оценка α* (h) уже не обладает оптимальными свойствами, хотя
54
обеспечивает невырожденность матрицы (F T F + hI ), поскольку ее определитель не равен нулю: det t(FT F + hI ) ≠ 0.
При Ω(α) = 
 α − α
α − α
 2 определение оптимальных значений параметра
2 определение оптимальных значений параметра
α* (h) для линейного статического объекта сводится к решению СЛУ вида
(FT F + hI )α* (h) = FT y* + βn |
|
, |
(2.3.14) |
α |
где α – априорная информация о решении. В данном случае оценка (2.3.14) при соответствующем выборе параметра регуляризации h совпадает с приближением метода максимума апостериорной вероятности Байеса при нормальном распределении ошибок измерений и нормальном распределении вектора случайных величин α с математическими
ожиданиями Mα = α (2.3.12).
Следует отметить, что между приведенными выше методами идентификации (ММП, МНК, МАВ), основанными на вероятностно статистическом подходе, и методом регуляризации по А.Н.Тихонову, основанном на функциональном подходе к решению некорректно поставленных задач, есть области «пересечения», области общих свойств оценок.
Непараметрическиеметодыидентификациисистем
Рассмотрим задачу идентификации статического объекта |
|
||||||
y* = f (x ) + ξ |
, |
i = |
|
|
(2.3.15) |
||
1,n |
|||||||
i |
i |
i |
|
|
|
|
|
в условиях непараметрической априорной неопределенности о структуре модели, когда о функции f (x) известны лишь общие свойства, такие
как однозначность, непрерывность, существование производных (мо-
дель черного ящика). Считаем, что y*, |
x , i = |
1,n |
– измеренные значе- |
i |
i |
||
ния входных и выходных переменных объекта x = (x1, x2 , …, xm ), i = 1,m с плотностью p(y, x) ξi – случайные величины с плотностью pξ (z).
Остановимся на статистическом подходе к идентификации объекта (2.3.15) с использованием функции регрессии r(x), которая, как извест-
но, является наилучшим приближением к модели объекта f (x)
r(x) = ∫ yP(y / x)dy, |
(2.3.16) |
|||
где |
|
|
R1 |
|
|
y − f (x) 2 P(y / x)P(x)dydx, |
|
||
r(x) = arg min |
∫ ∫ |
|
||
f |
|
|
|
|
|
R1 Rm |
|
|
|
55

P(y / x) = P(y, x) / P(x) – условная плотность распределения вероятно-
сти переменных y, x.
Задача идентификации статического стохастического объекта (2.3.15) заключается в оценке плотностей вероятности P(y, x), P(x)
и соответственно функции регрессии r(x).
Рассмотрим метод оценки функции регрессии с использованием непараметрических «ядерных» оценок плотности вероятности вида
[28, 29, 33]
|
|
Pn (x) = |
1 n |
x − x |
1 n |
m |
1 |
xj − xji |
|
|
|
||||||||||||
|
|
∑K |
|
|
|
i |
= |
∑∏ |
|
k j |
|
|
|
|
, |
(2.3.17) |
|||||||
|
|
|
|
|
hj |
|
hj |
||||||||||||||||
|
|
|
|
|
n i=1 |
h |
|
|
n i=1 j=1 |
|
|
|
|
||||||||||
где k j |
(xj − xji )/ hj |
j = |
|
|
– |
весовые |
функции |
«ядра» с |
центром |
||||||||||||||
1,m |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в точках xji , |
j = |
|
, |
i = |
|
, |
удовлетворяющие свойствам |
|
|
|
|||||||||||||
1,m |
1,n |
|
|
|
|||||||||||||||||||
|
|
|
k j |
(xj − xji )/ hj → 0, hj → 0, |
j = |
|
, |
|
|
(2.3.18) |
|||||||||||||
|
|
|
1,m |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
hj , j = 1,m – параметры «сглаживания».
По аналогии с (2. 3.17) имеет место непараметрическая оценка совместной плотности вероятности P(y, x)случайных величин y, x
Pn (y, x) = |
1 |
n |
1 |
y − y |
m |
1 |
xj − xji |
|
|
|||
|
∑ |
|
k |
i |
|
∏k j |
|
|
|
. |
(2.3.19) |
|
|
hy |
|
|
hj |
||||||||
|
n i=1 |
|
hy |
j=1 |
hj |
|
|
|||||
Подставляя оценки (2.3.17) и (2.3.19) в (2.3.16) и учитывая свойства ядер (2.3.18), получим непараметрическую «ядерную» оценку функции регрессии
|
|
|
|
n |
m |
1 xj − xji |
|
* |
|
|
|||||
|
|
|
|
∑∏k j |
|
|
|
|
|
|
yi |
|
|
||
|
|
|
|
|
|
|
|
hj |
|
|
|||||
f |
|
(x) = r |
(x) = |
i=1 j=1 |
hj |
|
|
|
|
. |
(2.3.20) |
||||
n |
|
|
|
|
|
|
|
|
|
|
|||||
|
n |
|
n |
m |
|
1 |
xj − xji |
|
|
|
|||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
∑∏k j |
|
|
|
|
|
|
|
|
|||
|
|
|
|
hj |
hj |
|
|
|
|||||||
|
|
|
|
i=1 j=1 |
|
|
|
|
|
|
|||||
Непараметрические оценки регрессии (2.3.20) широко используются в задачах идентификации, обработки экспериментальных данных в случаях, когда априорная информация о виде модели объекта отсутствует (модель «черного» ящика), когда известны лишь значения его входных и выходной переменных. В качестве ядер k, kj часто используют функции:
а) k (u) = exp(−u2 / 2);
56

б) |
k (u) = exp(− |
|
u |
|
); |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1− |
|
u |
|
|
при 0< |
|
u |
|
|
≤ 1; |
|||||||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
k (u) = |
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
0 |
|
|
|
при |
|
|
>1. |
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Непараметрические |
оценки |
регрессии (2.3.20) обладают лишь |
||||||||||||||||
асимптотическими оптимальными свойствами при бесконечно большом объеме выборки n (n → ∞). При конечных выборках непараметрические
оценки регрессии смещенные. Существуют различные методы устранения смещения непараметрических оценок регрессии, наиболее эффективными из которых являются метод «складного ножа» [29] и метод локальной аппроксимации плотности вероятности [34].
Другим интенсивно развивающимся в настоящее время методом идентификации систем в условиях непараметрической априорной неопределенности является подход, основанный на теории искусственных нейронных сетей (нейронах) [23]. Формально нейрон можно представить в виде системы
|
n |
|
y = ∑ωi xi ; |
(2.3.21) |
|
|
i=1 |
|
|
|
|
z = ϕ(y,h), |
|
|
функционирующей в два такта. На первом такте вычисляется величина суммарного возбуждения y, полученная от входных сигналов xi, взвешенных с весами wi. На втором такте для получения выходного сигнала z суммарное возбуждение пропускается через монотонно неубывающую
функцию активации φ, удовлетворяющую условию ϕ(x) < 1. В качестве
функций активации часто используются зависимости: 1) пороговая функция
1, |
если x > α; |
ϕ(x) = |
если x ≤ α; |
0, |
2) логистическая функция
ϕ(x) = |
1 |
; |
1+ exp(−αx) |
3)гиперболический тангенс
ϕ(x) = th(αx), α > 0.
Нейрон (2.3.21) способен получать сигналы и выдавать выходной сигнал z, близкий к нулю либо единице. Если выходной сигнал близок либо равен единице, то нейрон возбужден.
57
Нейроны вида (2.3.21) могут быть объединены в нейронную сеть определенной топологии (сети прямого распространения– персептроны, сети радиально базисных функций – RBF-сети, самоорганизующие карты Кохонена, сети Хопфилда и т. д.) [23].
Рассмотрим для примера решение задачи идентификации статического стохастического объекта (2.3.15) с одним входом и одним выходом с использованием RBF-сети
|
|
|
|
m |
|
|
|
yi (x) = wi0 + ∑ωijk j (x), |
(2.3.22) |
||
|
|
|
|
j=1 |
|
где k j (x) = exp (x − mj )2 |
/ 2σ j |
, |
j = 1, m – базисные функции, выпол- |
||
|
|
|
|
|
|
|
|
|
|
|
|
няющие роль нейрона; |
m – |
|
число базисных функций |
(m << n); |
|
mj – центры базисных функций; σj – регулирующий параметр. Задача идентификации в данном случае сводится к решению оптимизационной задачи
ω* = arg min |
m |
|
|
∑∑(ωijk j − yin )2 |
(2.3.23) |
||
ω |
n j=0 |
|
|
по определению параметров ω*ij , где {yin } – обучающий набор измере-
ний выходной переменной y.
Следует отметить, что приближение функции на основе RBF-сети, по сути, близко к непараметрическим оценкам функции регрессии (2.3.20). Например, при ωij = 1 и использовании в качестве базисных
функций с центрами mi = xi
x − x |
n |
x − x |
||||
ki (x) = k |
i |
|
/ k∑ |
i |
|
|
|
|
|||||
|
h |
i=1 |
|
h |
||
оценки (2.3.23) и (2.3.20) при m = 1 совпадают.
2.4. Интегрированныесистемыидентификации
Актуальным, интенсивно развивающимся в настоящее время направлением в области идентификации является построение математических моделей систем с учетом разного рода дополнительной априорной информации, накопленного опыта и знаний, удобным описанием которых является понятие объекта-аналога, т. е. системы, подобной исследуемому объекту [17, 18].
Объединение модели исследуемого объекта и модели объектованалогов в виде некоторой интегрированной системы моделей позволя-
58
ет отразить целостные, системные свойства реальных объектов, что существенно расширяет возможности традиционных методов идентификации систем и области их практического применения.
Интегрированныесистемымоделей сучетомаприорнойинформации
Удобной моделью, позволяющей учитывать различные дополнительные апостериорные либо априорные данные, является понятие объект-аналога, т. е. система, подобная исследуемому объекту.
Объект-аналог определим как реально существующий либо воображаемый упрощенный объект, отражающий основные черты исследуемой системы, особенности его строения и функционирования, представляющий и формализующий в виде моделей дополнительные апостериорные и априорные данные, накопленный опыт и знания.
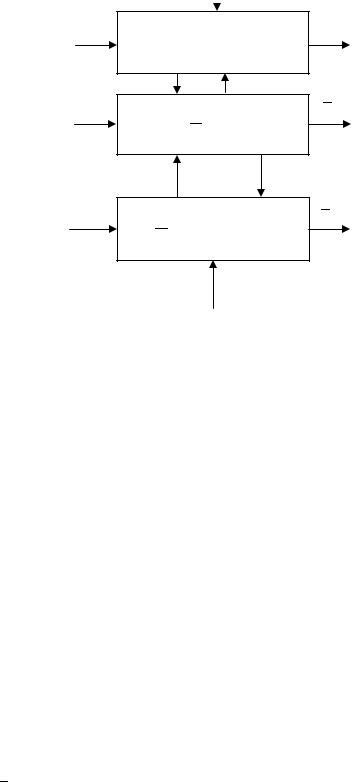
Объект-аналог Fa, изображенный на рис. 2.2, является некоторым отражением исследуемого объекта F (некоторый образ объекта управления либо его окружения)
ξt
Xt* ,Ut*
Zt
Объект управления
F(t, X*, U)
Объект-аналог
Fa(t, Z)
ηt
Yt*
Vt
Рис. 2.2. Представление объекта eghfdktybz и объекта аналога
Исследуемый объект и объект-аналог представляют некоторую интегрированную систему взаимодействующих моделей:
Y* (t) = F (t, X *,U *,ξ); |
(2.4.1) |
||
|
|||
|
V |
t = Fa (t, Z, η), |
|
|
|
||
где Y*, U*, X* – реализации выходных Y, входных U, X, управляемых
и наблюдаемых переменных объекта управления; V t – вектор выходных переменных моделей объектов-аналогов, представляющих дополнительные априорные данные, экспертные оценки и т. д.; F, Fa – модели исследуемого объекта и объекта-аналога (функции, функционалы, а в общем
59
случае операторы); ξi, η – случайные величины, представляющие погрешности измерений переменных исследуемого объекта и объекта аналога, ошибки, связанные с выбором модели, действием случайных неучтенных факторов, и т. п. Переменные Z объекта-аналога могут соответствовать переменным объекта управления, а также представлять параметры, функции (функционалы). Оператор модели объекта-аналога Fa, как и оператор модели объекта управления F, может быть представлен классами статических, динамических, параметрических либо непараметрических моделей, рассмотренных в параграфе 2.2.
В качестве примера системы моделей (2.4.1) приведем интегрированную стохастическую систему моделей добычи нефти, основанную на регрессионной модели добычи нефти f (t, α)
аналогов, представляющих дополнительные априорные сведения и экспертные оценки извлекаемых запасов [17]:
Q* (t |
) = |
f (t |
,α) + ξ |
, |
i = |
|
|
; |
|
|
1,n |
|
|||||||||
н i |
|
i |
i |
|
|
|
|
|
|
(2.4.2) |
|
|
|
T |
|
|
|
|
|
|
|
νj = νa (α) + ηj = ∫ f (τ,α)dτ + ηj , j = |
|
, |
|
|||||||
1, p |
|
|||||||||
|
|
|
0 |
|
|
|
|
|
|
|
где Q* (ti ), i = 1,n – фактические значения добычи нефти за соответствующие промежутки времени t = ti − ti−1, i = 1,n (год, месяц); Qн (ti ), i = 1,n – значения добычи нефти, полученные на основе модели f (t,α); νj , j = 1, p – дополнительные априорные данные и экспертные оценки
извлекаемых запасов нефти за время разработки месторождения T; νa (α)– извлекаемые запасы, полученные на основе модели добычи
нефти f (t,α).
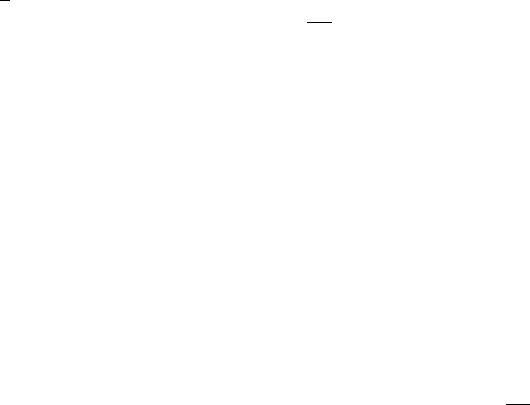
Исследуемому объекту управления может соответствовать не один,
анесколько объектов-аналогов, изображенных на рис. 2.3.
Вэтом случае получим интегрированную систему моделей
|
* |
= F (t, X |
* |
,U |
* |
,ξ); |
Y |
|
|
||||
|
|
|
|
|
|
(2.4.3) |
V = F (t, Z , η ), j = 1,m.
j aj j j
Простым примером системы моделей (2.4.3) может быть интегрированная стохастическая система моделей дебита скважин на основе регрес-
сионной модели дебита скважин f (t, kпр, Pпл − Pз ) с учетом априорной информации о продуктивности скважины и пластовом давлении [25]:
60
|
|
|
|
q* (t ) |
= f t , k |
пр |
(t |
), P |
(t |
) − P* (t |
) |
+ ξ |
; |
||||||||||
|
|
|
|
|
|
i |
|
|
i |
|
i |
|
пл |
|
i |
|
з |
i |
|
i |
|
||
|
|
|
|
|
|
|
|
) = kпр (ti ) + νi ; |
|
|
|
|
|
|
|
(2.4.4) |
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
kпр (ti |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
пл (t ) = P |
(t ) + ε , i = |
|
, |
|
|
|
|
||||||||||
P |
1,n |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
пл |
i |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где |
|
пр (ti ), |
|
пл (ti ), |
|
i = |
|
– |
дополнительные |
априорные сведения |
|||||||||||||
k |
P |
|
1,n |
||||||||||||||||||||
и экспертные оценки продуктивности скважины kпр (ti ) и пластового
давления Pпл (ti ); νi, εi – случайные величины, представляющие ошибки дополнительных априорных сведений и экспертных оценок.
ξt
|
|
Xt* ,Ut* |
Объект управления |
|
Yt* |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
F(t, X*, U) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z1t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Объект-аналог 1 |
V1t |
|
mt |
|
Объект-аналог m |
Vmt |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
●●● |
Z |
|
|
|
|
|
|
|
||||||
|
|
Fa1(t, Zm) |
|
|
|
|
|
|
|
Fam(t, Zm) |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
η1t |
|
|
|
|
|
|
|
|
|
|
|
|
ηmt |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Рис. 2.3. Структура интегрированной системы моделей первого уровня
Другим примером интегрированной системы моделей (2.4.3) может быть система моделей производственной функции, с учетом экспертных оценок емкости рынка νj и прогнозных значений объемов реализован-
ной продукции ytn +τ на период времени τ,
|
* |
|
|
α1 |
α2 |
αm |
|
|
|
|
|
|
|
|
|
|
|
(ti ) + ξi ,i = 1,n; |
|
||||||||||
yi |
= f (ti ,Ui ,α) = α0 u1 |
(ti ) u2 |
(ti ),...,um |
(2.4.5) |
||||||||||
|
|
T |
|
|
|
|
|
|
|
|
|
|||
νj = ∫ f (τ,U ,α)dτ + ηj , ytn +τ = f (tn + τ,U |
(tn ),α)+ ετ , j = |
|
,τ = |
|
, |
|
||||||||
1,l |
1,d |
|
||||||||||||
|
|
t0 |
|
|
|
|
|
|
|
|
|
|
||
где |
y*, i = |
|
– фактические значения объемов реализованной продук- |
|||||||||||
1,n |
||||||||||||||
|
|
i |
|
|
|
|
|
|
|
|
|
|
||
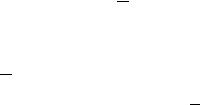
ции за соответствующие периоды времени t = ti − ti−1, i = 1,n. Объект-аналог первого уровня Fa1 (Z1 ) может, в свою очередь, иметь
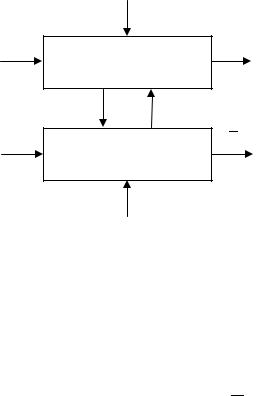
свой аналог – Fa2 (Z1, Z2 ) и т. д. В данном случае имеет место много-
уровневая иерархическая интегрированная система моделей, приведенная на рис. 2.4:
61
Xt* ,Ut*
Z1
Zm
ξt 
Объект управления
F (t,Yk* , X * )
Объект-аналог 1
F1 (Z1 )
●●●
Объект-аналог m F m (Z1, Z2 ,..., Zm )
ηm
Yt*
V1
Vm
Рис. 2.4. Представление многоуровневой интегрированной системы моделей
В этом случае получим интегрированную систему моделей
Y* |
= Fj (t, X *,U *,ξ); |
|
|
|
||||||||||||||
|
|
(t, Z |
|
η ); |
|
|
|
|||||||||||
|
|
|
|
1 |
= F |
, |
|
|
|
|||||||||
V |
|
|
|
|||||||||||||||
|
a1 |
|
1 |
|
1 |
|
|
|
|
|
|
|||||||
|
|
|
2 |
= F |
(t, Z |
, Z |
|
|
, η ); |
|
|
(2.4.6) |
||||||
V |
2 |
|
|
|||||||||||||||
|
a2 |
|
1 |
|
|
2 |
|
|
|
|||||||||
...................................; |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
m = F |
|
(t, Z |
, Z |
|
|
,..., Z |
|
, η |
). |
|||||||
V |
|
2 |
m |
|||||||||||||||
|
am |
|
1 |
|
|
|
m |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Примером (2.4.6) может быть интегрированная система добычи нефти нефтяного месторождения, разбитого на участки разработки [17]:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q* |
(t ) = f |
|
(t ,α) + ξ |
|
, |
i = |
|
; |
|
|
||||
j |
ji |
1,n |
||||||||||||
|
|
|
нj |
i |
i |
|
|
|
|
|
|
|||
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
v j = Vaj (α) + ηj = ∫ f j (τ,α)dτ + ηj , j = 1, p; (2.4.7) |
||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V = ∑Vaj (α) + ε, |
|
|
|
|
|
|
|
|||||||
|
|
|
|
j=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Qн*j (ti ), v j – добыча нефти и экспертные оценки извлекаемых запасов участков разработки. В данном случае в качестве объекта аналога
62

второго уровня выступает экспертная оценка извлекаемых запасов V всего месторождения.
Многообразие интегрированных систем моделей определяется многообразием моделей исследуемых объектов и моделей объектованалогов. Введем следующую классификацию интегрированных систем моделей (ИСМ) объектов управления [17, 18]:
1)линейные ИСМ;
2)нелинейные ИСМ;
3)непараметрические ИСМ;
4)комбинированные ИСМ.
Линейные ИСМ. Линейные интегрированные системы моделей объектов управления основаны на линейных статических либо динамических моделях исследуемых объектов разработки и на линейных (статических либо динамических) моделях объектов-аналогов.
Нелинейные ИСМ. Нелинейные интегрированные системы моделей объектов управления основаны на нелинейных статических либо динамических моделях исследуемых объектов разработки и линейных либо нелинейных моделях объектов налогов.
Непараметрические ИСМ. Непараметрические интегрированные системы моделей ТПР основаны на непараметрических статических либо динамических моделях ТПР и на непараметрических статических либо динамических моделях априорной информации.
Непараметрические интегрированные системы моделей ТПР используются в случаях, когда объект разработки слабо изучен либо достаточно сложный для его описания на основе параметрической, физически содержательной модели фильтрации флюидов. С другой стороны, и объекты-аналоги, представляющие дополнительные априорные данные, и экспертные оценки не удается представить в виде конечномерного параметрического описания.
Комбинированные ИСМ. Наиболее распространенными в настоящее время моделями объектов управления, позволяющими интегрировать всю имеющуюся информацию, являются комбинированные интегрированные системы моделей. Комбинированные ИСМ представляют более широкий класс моделей, включающий в себя линейные, нелинейные, непараметрические статические либо динамические интегрированные системы моделей и их комбинации.
63
Основныепонятияинтегрированныхсистемидентификации
Под интегрированной системой идентификации будем понимать процесс создания (проектирования) оптимальной (в смысле заданных критериев качества) структуры интегрированной системы моделей
(2.4.1), (2.4.3), (2.4.6).
В общем виде оптимальную структуру интегрированной системы моделей можно представить в виде [17]
|
F*, F* = arg min Φ |
( |
F*, F* |
) |
, |
|
|
(2.4.8) |
||
|
a |
F ,F* |
|
a |
|
|
|
|||
|
|
a |
|
|
|
|
|
|
|
|
где F*, |
F* – оптимальные модели объектов управления и моделей объ- |
|||||||||
|
a |
|
|
|
|
|
|
|
|
|
ектов-аналогов. При параметрическом представлении операторов F*, |
||||||||||
F* в виде известных функций либо функционалов |
f (α), f |
a |
(α), задан- |
|||||||
a |
|
|
|
|
|
|
|
|
|
|
ных с |
точностью до параметров |
α, задача |
идентификации сводится |
|||||||
к решению задач структурной оптимизации по определению вида функ-
ций f (α), fa (α):
f *, fa* = arg min Φ( f , fa , α, β), |
(2.4.9) |
f , fa |
|
и задач параметрической оптимизации по определению оптимальных значений α* (β) параметров моделей:
α* (β) = arg min Φ( f *, fa*,α,β), |
(2.4.10) |
α |
|
и оптимальных значений управляющих параметров: |
|
β* = arg min Φ( f *, fa*,α*,β), |
(2.4.11) |
β |
|
где Φ – комбинированный показатель качества, составленный из частных показателей качества объекта управления и показателей объектованалогов. Комбинированный показатель качества часто выбирают в виде суммы частных показателей качества:
m |
|
Φ(α,β) = J0 (α) + ∑β j Jaj (α) |
(2.4.12) |
j=1
модели объекта управленияJ0 (α)и взвешенных с весами βj показателей качества моделей объектов аналогов Jaj (α). Выбор вида частных пока-
зателей качества определяется наличием априорной информации о ве- роятностно-статистических характеристиках помех, априорной информации о параметрах модели α.
Приведем для примера решение задачи параметрической идентификации по определению оптимальных значений параметров линейной интегрированной системы моделей
64
f |
(x |
), |
|
f1 |
(x |
), |
|
F = |
|
11 |
|
1 |
21 |
|
|
|
|
|
|
f |
(x |
), |
|
|
1 |
n1 |
|
|
|
||
|
* |
= Fα + ξ, |
(2.4.13) |
y |
|
||
α = Rα + η, |
|
||
f |
(x12 ), |
, fm (x1m |
|
f22 |
(x22 ), , fm (x2m |
||
|
|
|
|
f2 (xn2 ), , fm (xnm
) |
y* |
|
|
|
|
1 |
|
) y* = y2* |
, |
||
|
|
|
|
) |
|
|
|
|
* |
|
|
|
yn |
|
|
|
|
||
α1 |
|
|
|
|
|
|
1 |
|
ξ1 |
|
|
η1 |
|
|||
|
|
|
α |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
α = |
α2 |
, |
|
= |
α2 |
|
ξ = ξ2 |
|
, η = |
η2 , |
||||||
α |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|||||||||||||
α |
|
|
|
|
|
|
ξ |
n |
|
|
η |
|
||||
|
|
|
||||||||||||||
|
|
m |
|
αm |
|
|
|
m |
||||||||
с использованием комбинированного квадратичного показателя качества вида
Φ = |
|
y* − Fα |
|
2 + |
|
α − Rα |
|
|
|
2 |
, |
(2.4.14) |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
W (β) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где F – матрица значений известных функций; y* – вектор измеренных значений выхода объекта; α – вектор неизвестных значений параметров; α – вектор значений априорной дополнительной информации о пара-
метрах модели объекта; R = (rij , i, j = 1,m) – известная квадратная мат-
рица; ξ, η – векторы случайных величин, представляющие погрешности измерения выхода объекта и ошибки задания априорной информации;
запись |
|
X |
|
|
|
2 |
означает квадратичную форму |
X TWX T . |
В данном случае |
|||||||||||
|
|
|
||||||||||||||||||
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
решение оптимизационной задачи |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
α* (β) = arg min Φ(α*,β) |
|
|
|
|
(2.4.15) |
||||||
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
сводится к решению системы линейных уравнений вида [17] |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
T |
T |
|
α |
* |
(β) = F |
T |
y |
* |
T |
W |
(β)α, |
(2.4.16) |
|
|
|
|
|
|
|
F |
|
F + R |
W (β)R |
|
|
|
+ R |
||||||
где W(β) – диагональная матрица вектора управляющих параметров β. Следует отметить, что задача (2.4.11) по определению оптималь-
ных значений вектора управляющих параметров β* не имеет аналитического решения и решается методами последовательных приближений.
Из системы линейных уравнений (2.4.13) следуют оценки параметров линейных систем, полученных традиционными методами идентификации, приведенными в параграфе 2.3:
1. Оценки метода наименьших квадратов (при β j = 0, j = 1,m = 0).
65
2. Регуляризированные по А.Н. Тихонову оценки метода наименьших квадратов [при W (β) = β, R = I, α = 0, где I – единичная мат-
рица].
3. Байесовские оценки метода максимума апостериорной вероятности [при R = I,W (β) = I, α = Mα, где в качестве априорной инфор-
мации используются данные о среднем значении α = Mα случайного параметра α, распределенного по нормальному закону].
66