

новая папка 1 / 231726
.pdfРисунок 6
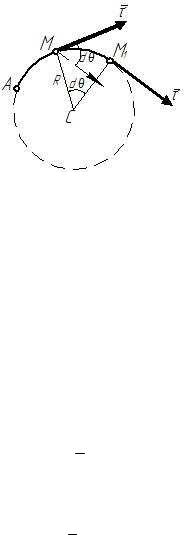
Эти оси называют осями естественного трехгранника и направляют
следующим образом: ось Мτ – вдоль |
касательной |
к |
траектории |
в сторону |
положительного отсчета координаты S; |
ось Мn – |
по |
нормали, |
лежащей в |
соприкасающейся плоскости и направленной в сторону вогнутости траектории;
ось Мb – перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль Мn называется главной нормалью, а перпендикулярная к ней нормаль Мb – бинормалью.
Единичные векторы естественных осей обозначают τ , n, b .
Прямоугольный трехгранник с вершиной в точке М называется естественным трехгранником.
Система естественных осей τ, n, b будет двигаться по траектории вместе с точкой М, следовательно, ориентация осей естественного трехгранника в пространстве будет изменяться в зависимости от вида траектории и закона движения точки по этой траектории.
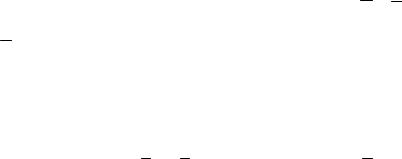
Угол ∆Θ между единичными векторами τ и τ1 касательных к траектории в двух её соседних точках М и М1 называется углом смежности (рисунок 7).
11
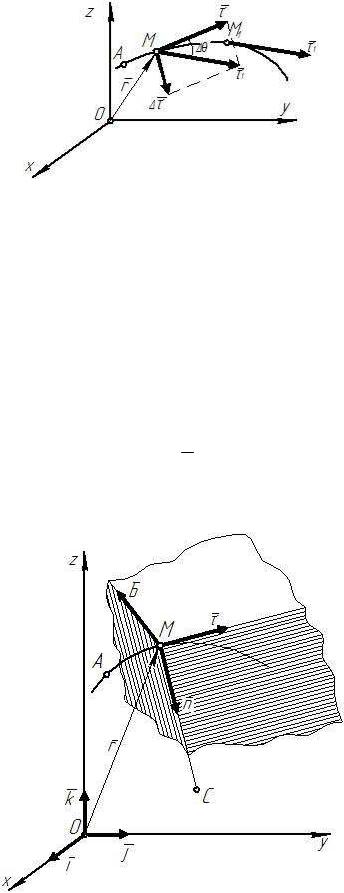
Рисунок 7
Предел отношения угла смежности ∆Θ к соответствующей длине дуги ∆S
называется кривизной траектории в данной точке М:
lim |
θ = |
dθ |
= k . |
(11) |
|
||||
S →0 |
S dS |
|
||
Величина ρ, обратная кривизне, называется радиусом кривизны траектории в данной точке:
ρ = 1 k
Точка С называется центром кривизны траектории в точке М (рисунок 8).
Рисунок 8
12
Для прямолинейной траектории ∆Θ = 0, поэтому её кривизна k = 0, а
радиус кривизны равен бесконечности: ρ = |
1 |
|
= ∞. Если траекторией точки |
||||||
k |
|||||||||
|
|
|
|
|
|
|
|
||
является окружность радиуса R (рисунок 9), то, учитывая, что |
|||||||||
ММ1 = dS = R × dQ и k = dΘ |
= dΘ |
= 1 , |
|||||||
( |
|
|
|
|
|
|
|
|
|
|
|
|
dS |
|
R × dQ |
|
R |
||
получим, что ρ = R .
|
|
|
|
|
|
|
|
|
|
Рисунок 9 |
|
|
|
|
|
|
|
|
|
||||||||||||
Так как, вектор ускорения |
|
|
точки лежит в соприкасающейся плоскости, |
||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||
т. е. в плоскости Мtn, то проекция вектора |
|
на бинормаль равна нулю |
|||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
аb = 0 |
|
|
|
|
|
|
|
|
|
|
||||||||
и ускорение точки находится как векторная сумма двух составляющих – |
|||||||||||||||||||||||||||||||
касательного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
aτ и нормального an ускорений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
= |
aτ + |
|
|
n . |
|
|
|
|
|
(12) |
||||||||||
|
|
|
|
|
|
|
|
|
a |
a |
|
|
|
||||||||||||||||||
Составляющие ускорения по направлениям τ |
и n соответственно равны |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
= |
dV |
|
|
|
|
|
|
|
|
|
|
= |
V 2 |
|
|
|
|
|
|||||||
|
|
|
|
a |
|
|
τ |
τ |
, |
|
|
a |
|
|
|
|
|
n |
|
||||||||||||
|
|
|
|
|
τ |
dt |
|
|
|
|
|
|
|
|
|
n |
|
|
|
ρ |
|
|
|
|
|
||||||
Проекция ускорения точки на касательную |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dVτ |
&& |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
aτ = |
|
|
dt |
= S |
|
|
|
|
(13) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
называется касательным (или тангенциальным) ускорением.
13

Проекция ускорения точки на касательную равна первой производной по времени от численной величины скорости или второй производной от дуговой координаты S.
Проекция ускорения на главную нормаль
a |
|
= |
V 2 |
(14) |
|
n |
ρ |
||||
|
|
|
называется нормальным ускорением.
Проекция ускорения на главную нормаль равна квадрату скорости,
деленному на радиус кривизны траектории в данной точке кривой.
Касательное ускорение характеризует изменения модуля скорости, а
нормальное ускорение характеризует изменение скорости по направлению.
Вектор an направлен вдоль главной нормали Мn всегда в сторону вогнутости кривой, так как всегда an > 0, а вектор aτ направлен вдоль касательной
Мτ в положительном или отрицательном направлении оси Мτ в зависимости от знака проекции aτ (рисунок 10).
Рисунок 10
Вектор ускорения точки a изображается диагональю параллелограмма,
построенного на составляющих aτ и an . Так как эти составляющие взаимно перпендикулярны, то модуль вектора a и угол его отклонения от нормали Мn
определяются по формулам:
14

|
a = |
|
a2 + a2 |
, |
|
|
(15) |
||||||||
|
|
|
|
τ |
n |
|
|
|
|||||||
|
tgμ = |
|
|
aτ |
|
|
. |
|
|
|
|
(16) |
|||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
an |
|
|
|
|
|
|||
Касательное |
ускорение a |
= |
dVτ |
|
равно |
нулю при |
движении |
точки с |
|||||||
|
|||||||||||||||
|
τ |
|
|
dt |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
постоянной по модулю скоростью и в моменты времени, в которые скорость Vτ |
|||||||||||||||
достигает экстремальных значений. |
|
|
|
|
|
||||||||||
Если Vτ и aτ |
одного знака, |
то модуль скорости V = |Vτ |
| точки возрастает и |
||||||||||||
движение называется ускоренным. Если |
|
Vτ и |
aτ разных |
знаков, то |
модуль |
||||||||||
скорости V = |Vτ | точки убывает и движение называется замедленным. При aτ = 0
модуль скорости остается постоянным – движение равномерное.
2
Нормальное ускорение an = Vρ равно нулю при прямолинейном движении
( ρ = ∞), в точках перегиба криволинейной траектории и в моменты времени, в
которые скорость точки обращается в ноль.
В том случае, если требуется определить касательное и нормальное ускорения движения точки, заданного уравнениями движения (1), то сначала находят модули скорости и ускорения точки по формулам (3), (4), (6), (7), а затем
вычисляют касательное ускорение
|
|
|
|
аτ |
= |
|
dV |
|
|
= |
|
Vx |
× ax |
+ Vy × ay |
+ Vz × az |
|
, |
(17) |
|||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
dt |
|
|
|
|
V |
|
|||||||||||||||||
где знак «+» при |
|
dV |
означает, что |
движение точки |
ускоренное, |
||||||||||||||||||
|
|
||||||||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
что движение замедленное. |
||||||||||||||||||
направления V |
и |
|
|
||||||||||||||||||||
aτ совпадают; знак «–» – |
|||||||||||||||||||||||
Нормальное ускорение точки вычисляют по формуле |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
. |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
n |
|
a2 − a 2 |
(18) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
||
Для приобретения навыков в решении задач по кинематике точки рекомендуется самостоятельнорешитьследующиезадачииз[5]: 10.1, 10.2, 10.14, 12.7, 12.13, 12.21, 12.24.
15
2 Вопросы для самоконтроля
1 Что изучает кинематика?
2 В чем состоят две основные задачи кинематики?
3 Какой вид имеют уравнения движения при различных способах задания движения: а) векторном; б) координатном; в) естественном?
4 Как определяется скорость при различных способах задания движения
(векторном, координатном, естественном)?
5 Как определяется ускорение при различных способах задания движения
(векторном, координатном, естественном)?
6 Что такое оси естественного трехгранника?
7 Что называется радиусом кривизны траектории в данной точке?
8 Чему равен радиус кривизны при движении точки по прямой? по окружности?
8 Что такое алгебраическая скорость? Что характеризует знак алгебраической скорости?
9 Как вычисляются и как направляются касательное и нормальное ускорения?
10 Что характеризует касательное ускорение, нормальное ускорение?
11 Какое движение называют ускоренным? замедленным?
12 При каком движении ускорение точки равно нулю в течении промежутка времени?
13 В каких случаях касательное ускорение равно нулю?
14 В каких случаях нормальное ускорение равно нулю?
16
3 Лабораторная работа
Кинематика материальной точки
3.1 Содержание работы
Точка М движется |
в плоскости xOy согласно уравнениям |
х = f 1 (t ), y = f 2 (t ), где x, y – |
в см., t – в с. |
Найти: |
|
1)уравнение траектории в явном виде;
2)для момента времени t1 = 1c, определить:
a)скорость и ускорение точки;
б) её касательное и нормальное ускорения;
в) радиус кривизны в соответствующей точке траектории.
Необходимые для выполнения работы данные приведены в таблице 1.
Цель работы: научиться определять кинематические характеристики движения точки и изображать их на графике.
Таблица 1– исходные данные
№ |
х = f 1 (t ), см |
y = f 2 (t ), см |
t1 , с |
|
вар. |
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
|
4 |
|
|
|
|
|
1 |
x = 2t 2 − 3 |
y = 3t |
t1 = 1 |
|
|
|
|
|
|
2 |
x = 2t − 5 |
y = t 2 − 2t |
t1 = 1 |
|
|
|
|
|
|
3 |
πt |
πt |
t1 |
= 2 |
|
x = 2sin |
y = 2cos |
|
|
|
3 |
3 |
|
|
|
|
|
|
|
4 |
x = 2t 2 + 2 |
y = 2t |
t1 = 2 |
|
|
|
|
|
|
5 |
x = t − 3 |
y = 2t 2 |
t1 |
= 1 |
6 |
πt |
πt |
t1 |
= 1 |
|
x = 10cos |
y = 10sin |
|
|
|
6 |
6 |
|
|
|
|
|
|
|
7 |
x = 3t 2 |
y = 4t + 1 |
t1 |
= 1 |
17
Продолжение таблицы 1
1 |
2 |
|
|
|
3 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
x = 2t |
|
|
y = 4t 2 |
|
t =1 |
|||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
x = 5sin πt |
y = 5cos πt |
t |
= |
1 |
|
|
||||||
|
|
|
|
|
|||||||||
|
2 |
|
|
|
2 |
1 |
2 |
|
|||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
10 |
x = 2 − 3t 2 |
y = 5t |
|
t = |
3 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
1 |
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
11 |
x = 5t + 4 |
y = t 2 |
|
t =1 |
|||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
12 |
x =1 − t 2 |
y = 2t |
|
t = |
1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
1 |
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
13 |
|
πt |
|
|
πt |
t1 |
=1 |
|
|
||||
|
x = sin |
|
|
y = 3 − cos |
|
|
|
|
|
|
|||
|
3 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
x = 2cos πt |
y = 3sin πt |
t |
= |
1 |
|
|
||||||
|
|
|
|
|
|||||||||
|
2 |
|
|
|
2 |
1 |
2 |
|
|||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
15 |
x = 3t |
|
|
y = 2t 2 −1 |
t =1 |
||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
16 |
x = t 2 − 4 |
y = 2t 2 |
|
t =1 |
|||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
17 |
x = t +1 |
|
|
y = 2t 2 |
|
t =1 |
|||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
18 |
x = 3t 2 − 2t |
y = 6t 2 − 4t + 5 |
t =1 |
||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19 |
x = 2 − cos |
πt |
|
πt |
− 4 |
t1 |
=1 |
|
|
||||
|
3 |
y = sin |
|
|
|
|
|
|
|||||
|
|
|
3 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
x = sin |
2πt |
|
y = cos |
2πt |
− 2 |
t |
= |
1 |
|
|
||
|
|
|
|
|
|
|
|
||||||
|
3 |
|
|
3 |
|
1 |
2 |
|
|||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||
21 |
x = 2t 2 |
|
|
y =1 − 4t 2 |
t = |
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
3 |
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||||||
22 |
x = 2 − 5t |
y = 5t 2 |
|
t = |
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
23 |
πt |
+ 2 |
|
πt |
+ 3 |
t1 |
=1 |
|
|
||||
|
x = 3cos |
y = 4sin |
|
|
|
|
|
|
|||||
|
4 |
|
|
4 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||
24 |
x = t − 2 |
|
|
y = t 2 + 2 |
t = |
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
18
Продолжение таблицы 1
1 |
2 |
3 |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
x = 5t 2 |
y = |
1 |
t |
|
t = |
1 |
|
||
|
|
|
|
|
||||||
|
|
5 |
|
|
1 |
10 |
|
|||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
26 |
x = 2 − t |
y = 4t 2 |
|
t =1 |
|
|||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
27 |
πt |
|
|
|
2πt |
|
t1 |
=1 |
|
|
|
x = 2 − sin |
y = 2cos |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||||
|
6 |
6 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
28 |
πt |
|
|
|
πt |
|
t1 |
=1 |
|
|
|
x =10cos |
y = 3sin |
|
|
|
|
|
|||
|
6 |
6 |
|
|
|
|
|
|||
|
|
|
|
|
|
|||||
29 |
x = t 2 −1 |
y = 2t |
|
t1 =1 |
|
|||||
|
|
|
|
|
|
|||||
30 |
x = 3t |
y = t 2 − 3 |
|
t =1 |
|
|||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.2 Порядок выполнения работы
1 Найти уравнение траектории точки в явном виде, исключив из уравнений движения время t. Построить полученную линию на координатной плоскости.
2 Определить координаты точки в заданный момент времени t1. Для этого подставить значение t1 в уравнения движения. Отметить полученную точку на чертеже.
3 Определить проекции скорости Vx , Vy точки на оси x и y путем дифференцирования уравнений движения точки и подстановки значения t1 в
полученные соотношения. Показать составляющие Vx , Vy на рисунке и построить вектор V .
4 Определить проекции ускорения ax , ay точки на оси x и y путем дифференцирования проекций скоростей Vx , Vy на соответствующие оси.
Показать составляющие ax и ay и построить вектор a . 5 Найти касательное ускорение по формуле
19
|
dV |
|
|
|
Vx × ax + Vy × ay |
|
а = |
|
|
|
= |
||
|
|
|||||
τ |
|
dt |
|
|
|
V |
|
|
|
|
|
||
|
|
|
|
|
|
|
и показать вектор aτ на чертеже.
6 Определить нормальное ускорение точки по формуле an = 
 a2 − aτ2
a2 − aτ2
и показать вектор an на чертеже.
7 Найти радиус кривизны траектории по формуле
ρ = V 2 an
4 Пример выполнения лабораторной работы
Лабораторная работа
Кинематика материальной точки
Точка М движется в плоскости xOy согласно уравнениям
|
x = |
π |
|
|
|
|
|
3сos |
t |
|
|
|
|
|
|
3 |
|
|
, |
(19) |
|
|
|
π |
|
||
y = 3 − 5sin |
t |
|
|
|||
|
|
3 |
|
|
|
|
|
|
|
|
|||
где x, y – координаты, см;
t – время, с.
Найти:
1)уравнение траектории в явном виде;
2)для момента времени t1 = 1 c, определить:
a)скорость и ускорение точки;
б) её касательное и нормальное ускорения;
в) радиус кривизны в соответствующей точке траектории.
20