

8.1.4 Построение переходного процесса замкнутой системы
по каналу f и S(t)
Полная схема, по
каналу возмущающего воздействия
f(t)![]() y(t),
которая показана на рисунке 8.1.
y(t),
которая показана на рисунке 8.1.
Передаточная функция эквивалентного объекта будет иметь вид
![]() ,
mA,
(8.14)
,
mA,
(8.14)
где
![]() –
передаточная
функция объекта регулирования,
(кгс/см2)/%УП,
–
передаточная
функция объекта регулирования,
(кгс/см2)/%УП,
![]() –
передаточная
функция датчика давления пара в барабане
котла, mA/(кгс/см2),
–
передаточная
функция датчика давления пара в барабане
котла, mA/(кгс/см2),
![]() –
передаточная
функция топливоподающего устройства.
–
передаточная
функция топливоподающего устройства.
Подставляя численные
значения передаточных функций входящих
в передаточную эквивалентного объекта
и заменяя оператор
![]() на
на
![]() ,
получим
,
получим
 ,
mA.
(8.15)
,
mA.
(8.15)
Переходный в замкнутой системе по каналу f (рисунок 8.5) можно вычислить, используя вещественную частотную характеристику (ВЧХ). Передаточная функция такой системы будет иметь вид
 .
(8.16)
.
(8.16)
Заменяя оператор Р на iω, получаем АФЧХ замкнутой системы Wзс(iω).
Для приближенного построения переходного процесса устойчивой системы, вызванного воздействием типа единичного скачка при нулевых начальных условиях, воспользуемся следующим интегралом
 .
(8.17)
.
(8.17)
Вычисление интеграла выполним в оболочке Mathcad 2001 Professional
(приложение Б), расчетные значения переходного процесса (рисунок 8.5) сведем в таблицу 8.4.
Таблица 8.4 – Расчетные значения переходного процесса
t, c |
y(∞) |
0 |
0 |
50 |
0,627 |
100 |
1,292 |
150 |
1,226 |
200 |
0,947 |
250 |
0,897 |
300 |
0,993 |
350 |
1,038 |
400 |
1,013 |
450 |
0,989 |
500 |
0,992 |
550 |
1,002 |
600 |
1,004 |
650 |
1 |
700 |
0,999 |
Рисунок 8.5 – Переходный процесс замкнутой системы по каналу f
По разработанной программе на кафедре АТП RAF1S “Расчет параметров настройки ПИ-регулятора в системе с объектом
![]() .
(8.18)
.
(8.18)
построим график переходного процесса объекта управления по каналу S.
Для этого введем исходные данные
![]() (кгс/см2)/%;
T0
= T2
= T3
= 0; Т1
= 3,75 с; m
= 0,221, а также полученные раннее ОПН
регулятора.
(кгс/см2)/%;
T0
= T2
= T3
= 0; Т1
= 3,75 с; m
= 0,221, а также полученные раннее ОПН
регулятора.
Получаем переходный процесс по каналу возмущения, идущего со стороны регулирующего органа (рисунок 8.6). Результаты расчета сведем в таблицу 8.5.
Таблица 8.5 - Расчетные значения переходного процесса по каналу S
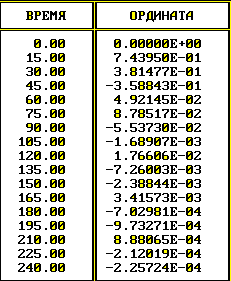
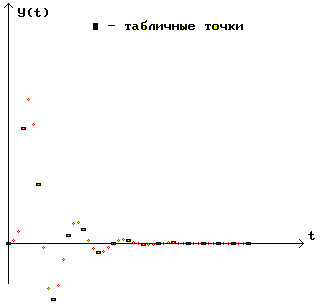
Рисунок 8.6 – Переходный процесс замкнутой системы по каналу S
8.1.5 Прямые оценки качества переходного процесса по каналам f и s
Любая промышленная АСР кроме устойчивости должна обеспечивать определенные качественные показатели процесса регулирования.
Качество процесса регулирования оценивают по переходной характеристике (рисунок 8.5) по отношению к единичному ступенчатому воздействию.
Склонность системы к колебаниям, следовательно, и запас устойчивости могут быть охарактеризованы максимальным значением регулируемой величины hmax или так называемым перерегулированием.
По каналу
f
- .
.
По
каналу S
- .
.
Время регулирования tp – время, по истечению которого отклонение регулируемой величины от установившегося состояния не будет превышать некоторой наперед заданной величины . Обычно = 0,05y() = 0,051 = 0,05.
По каналу f tp = 280 c.
По каналу S tp = 100 c.
Максимальная динамическая ошибка:
По каналу f А1 = 0,339.
По каналу S А1 = 0,74.
Степень затухания называется отношение разности двух соседних амплитуд, одного знака, к большей из них
По каналу
f
 .
.
По каналу S
 .
.