

ferma / ДИПЛОМ БАКАЛАВРА / диплом 5 курс / ___Диплом Гончаров____ / _Дипломs / Дипломы теплотехников / Пояснит. Записка / По разделам / 8.4 АСР разрежения
.doc8.4 Автоматическая система регулирования разрежения в топке котла
8.4.1 Расчет динамических характеристик элементов АСР
Структурная схема АСР разрежения приведена на рисунке 8.19, где
Wр(р)– передаточная функция регулятора разрежения;
Wоб(р) – передаточная функция объекта регулирования;
Wдф(р) – передаточная функция демпфера;
Wим(р) – передаточная функция исполнительного механизма (ИМ) регулятора разрежения;
Рисунок 8.19 – Структурная схема одноконтурной АСР
На основании полученной кривой разгона при возмущении расходом газа (таблице 8.14, рисунок 8.20, 8.21).
Рисунок 8.20 – Возмущающее воздействие
Таблица 8.14 – Значение разрежения
от времени
t, c |
δсг,кгс/м2 |
Δоп,кгс/м2 |
0 |
0 |
0 |
2 |
0,1 |
0,9 |
4 |
1,05 |
0,85 |
8 |
1,8 |
1,5 |
10 |
1,93 |
1,6 |
12 |
1,98 |
1,79 |
14 |
1,99 |
1,86 |
16 |
2 |
1,99 |
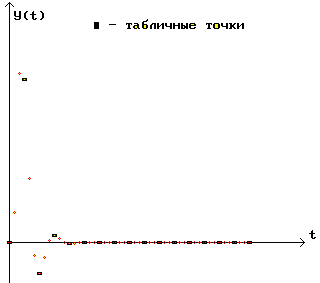
Рисунок 8.21 – Кривая разгона АСР разрежения
Полученная кривая
разгона (рисунок 8.21) представляет собой
S-образную
временную характеристику. В таком случае
для определения динамических параметров
объекта воспользуемся методом Круг-Мининой
[7]. Согласно этого метода по кривой
разгона объекта регулирования (рисунок
8.21) графическим методом определяем
![]() с
и
с
и
![]() с,
при которых ординаты
временной характеристики составляют
с,
при которых ординаты
временной характеристики составляют
![]() кгс/м2
и
кгс/м2
и
![]() кгс/м2
соответственно, где
кгс/м2
соответственно, где
![]() кгс/м2.
кгс/м2.
Вычисляем динамические параметры объекта:
- время чистого запаздывания
![]() ,
с (8.42)
,
с (8.42)
![]() с;
с;
- постоянная времени объекта
![]() ,
с (8.43)
,
с (8.43)
![]() с;
с;
- коэффициент передачи объекта
![]() (8.44)
(8.44)
![]() (кгс/м2)/%.
(кгс/м2)/%.
Передаточная функция объекта регулирования будет иметь
 ,
(кгс/м2)/%.
(8.45)
,
(кгс/м2)/%.
(8.45)
Передаточная функция исполнительного механизма регулятора разрежения:
![]() ,
(8.46)
,
(8.46)
где Тим – постоянная времени ИМ регулятора разрежения, с;
![]() .
.
Передаточная функция демпфера измерительной цепи регулятора:
![]() ,
(8.47)
,
(8.47)
где Тдф – настраиваемая величина, с;
для регулятора типа Ремиконт – 130
Тдф = 0,04+α·1.32,
α – значение потенциометра “Демпфер” в регуляторе (изменяется от 0 до 1).
При максимальном значении α = 1 находим передаточную функцию демпфера
![]()
Передаточная функция датчика, т.к. инерционность датчика мала, считаем его усилительным звеном
![]() ,
(8.48)
,
(8.48)
где Кд - номинальный статический коэффициент усиления датчика разрежения, мА/( кгс/м2):
![]() ,
(8.49)
,
(8.49)
где I – выходной токовый сигнал датчика равный 4÷20 мА,
Р – перепад давления равный 2,5 кгс/м2:
![]() мА/( кгс/м2).
мА/( кгс/м2).
Передаточная
функция датчика
![]()
8.4.2 Расчет границы области заданного запаса устойчивости
При расчете границы области заданного запаса устойчивости будем использовать метод расширенных амплитудно-фазо-частотных характеристик (РАФЧХ).
Исходными для определения границы области заданного запаса устойчивости m = mзд = 0,478 является выражение (ф.8.37).
Так, для объекта регулирования с передаточной функцией (ф.8.45) граница области заданного запаса устойчивости определяется выражениями:
Задавая различные значения ω найдем границу заданного запаса устойчивости.
По формулам (8.12) рассчитаем границу заданного запаса устойчивости для данной передаточной функции (8.8) в оболочке Mathcad 2001 Professional
(приложение Ж), численные значения сведем в таблицу 8.15. По этим численным значения в пространстве параметров настройки построим границу заданного запаса устойчивости (рисунок 8.22), по которой, используя первый интегральный критерий, определяем оптимальные параметры настройки регулятора:
– коэффициент
регулятора: ![]() %/mA;
%/mA;
– время изодромы:
![]() с.
с.
В таком случае
передаточная функция регулятора в
численном виде будет выглядеть:
 ,
%/mA.
,
%/mA.
Таблица 8.15 – Расчетные
значения параметров настройки
Кр,%/mA |
Кр/Ти,%/(mA·c) |
-2.367 |
0 |
-1.646 |
0.132 |
-0.702 |
0.486 |
0.402 |
0.989 |
1.602 |
1.555 |
2.835 |
2.092 |
4.042 |
2.508 |
5.165 |
2.718 |
6.153 |
2.644 |
 Рисунок 8.22 – Граница заданного
Рисунок 8.22 – Граница заданного
запаса устойчивости ПИ-регулятора
8.4.3 Построение переходных процессов по каналу f и S
и определение оценок качества процессов
Полная схема, по
каналу задающего воздействия f(t)![]() y(t),
которая показана на рисунке 8.19.
y(t),
которая показана на рисунке 8.19.
Передаточная функция эквивалентного объекта будет иметь вид:
![]() ,
mA,
(8.50)
,
mA,
(8.50)
где
![]() –
передаточная
функция объекта регулирования;
–
передаточная
функция объекта регулирования;
![]() ,
,
![]() –
передаточные
функции датчиков давления воздуха и
газа перед котлом;
–
передаточные
функции датчиков давления воздуха и
газа перед котлом;
![]() –
передаточная
функция исполнительного механизма.
–
передаточная
функция исполнительного механизма.
Подставляя численные
значения передаточных функций входящих
в передаточную эквивалентного объекта
и заменяя оператор
![]() на
на
![]() ,
получим
,
получим
 ,
mA.
,
mA.
Передаточная функция эквивалентного регулятора будет иметь вид:
![]() ,
(8.51)
,
(8.51)
где
![]() –
передаточная
функция регулятора;
–
передаточная
функция регулятора;
– передаточная функция демпфера.
 .
.

Рисунок 8.23 – Структурная схема АСР топлива
Wр*(Р) – передаточная функция регулятора;
Wоб*(Р) – передаточная функция объекта регулирования;
Переходный в замкнутой системе (рисунок 8.4.3.2) можно вычислить, используя вещественную частотную характеристику (ВЧХ). Передаточная функция такой системы будет иметь вид:
 .
(8.52)
.
(8.52)
Заменяя оператор Р на iω, получаем АФЧХ замкнутой системы Wзс(iω).
Для приближенного построения переходного процесса устойчивой системы, вызванного воздействием типа единичного скачка при нулевых начальных условиях, воспользуемся следующим интегралом ф. 8.17. Вычисление интеграла выполним в оболочке Mathcad 2001 Professional (приложение З), расчетные значения переходного процесса (рисунок 8.24) сведем в таблицу 8.16.
Таблица 8.16 – Расчетные значения переходного процесса
t, c |
Y(t) |
0 |
0 |
5 |
0,884 |
10 |
1,218 |
15 |
1,143 |
20 |
0,991 |
25 |
0,943 |
30 |
0,975 |
35 |
1,008 |
40 |
1,013 |
45 |
1,004 |
50 |
0,997 |
55 |
0,997 |
60 |
0,999 |
65 |
1 |
70 |
1 |
75 |
1 |
Рисунок 8.24 – Переходный процесс замкнутой системы по каналу f
По разработанной программе на кафедре АТП RAF1S “Расчет параметров настройки ПИ-регулятора в системе с объектом” ф. (8.18) и построим график переходного процесса объекта управления по каналу S.
Для этого введем исходные данные:
![]() (кгс/см2)/%;
T0
= T2
= T3
= 0; Т1
= 2,56 с; m
= 0,478, а также полученные раннее ОПН
регулятора.
(кгс/см2)/%;
T0
= T2
= T3
= 0; Т1
= 2,56 с; m
= 0,478, а также полученные раннее ОПН
регулятора.
Получаем переходный процесс по каналу возмущения, идущего со стороны регулирующего органа (рисунок 8.18).
Результаты расчета сведем в таблицу 8.13.
Т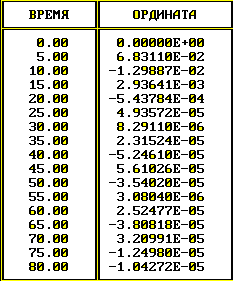
 аблица
8.13 - Расчетные значения переходного
процесса по каналу S
аблица
8.13 - Расчетные значения переходного
процесса по каналу S
Рисунок 8.18 – Переходный процесс замкнутой системы по каналу S
Произведем прямую оценку качества полученных переходных процессов регулирования по следующим показателям:
а) длительность процесса регулирования – время, по истечении которого отклонение регулируемой величины от установившего состояния не будет превышать некоторой, наперед заданной величины
δ = 0,05 ∙ y(∞) = 0,05 ∙ 1 = 0,05,
по каналу f tр = 27 с,
по каналу S tр = 10 с;
б) степень затухания
по каналу f Ψ =
![]() ,
,
по каналу S Ψ =
![]() ;
;
в) величина динамической ошибки регулирования
по каналу f А1 = 0,226,
по каналу S А1 = 0,07;
г) величина перерегулирования
по
каналу f
 ;
;
по
каналу S
 .
.