

ferma / ДИПЛОМ БАКАЛАВРА / диплом 5 курс / ___Диплом Гончаров____ / _Дипломs / Дипломы теплотехников / Пояснит. Записка / По разделам / 8.2 АСР питания
.doc8.2 Расчет АСР питания
8.2.1 Динамические характеристики элементов АСР питания
Структурная схема АСР питания приведена на рисунке 8.7, где приняты следующие обозначения:
Wр(Р)–передаточная функция регулятора,
Wоб(Р)–передаточная функция объекта регулирования,
Wро(Р)–передаточная функция регулирующего органа,
Wдф(Р)–передаточная функция демпфера,
S(t)–задающее воздействие,
y(t)–выходная характеристика,
f–возмущающее воздействие.
Рисунок 8.7 – Структурная схема одноконтурной АСР
Найдем передаточную функцию регулирующего органа (РО), для этого определим:
Максимальный массовый расход среды: Qmax = 17,6 т/ч.
Шаг построения расходной характеристики РПК по расходу:
![]() т/ч.
т/ч.
Расход питательной воды в расчетной точке: Qj = ∆Q · (j - 1) + 0.2∙Qmax, результаты расчета сведем в таблицу 8.6.
Начальное значение, шаг и конечное значение счетчика регулирующего органа: j = 0,1...10. Из полученной расходной характеристики (рисунок 8.8) определим
Кро
=
![]() ,
(8.19)
,
(8.19)
![]()
![]()
тогда передаточная функция РО запишется как
Wро = Кро = 0,157 .
Таблица 8.6 – Зависимость Qj = f(Li)
Lj |
Qj, т/ч |
0 |
1,664 |
0.1 |
3,2 |
0.2 |
4,736 |
0.3 |
6,272 |
0.4 |
7,808 |
0.5 |
9,344 |
0.6 |
10,88 |
0.7 |
12,416 |
0.8 |
13,952 |
0.9 |
15,488 |
1 |
17,024 |
Рисунок 8.8 – График Qj = f(Lj)
Передаточная функция датчика уровня, т.к. инерционность датчика мала, считаем его усилительным звеном
![]() ,
(8.20)
,
(8.20)
где Кд - номинальный статический коэффициент усиления датчика разрежения, мА/( кгс/м2):
![]() ,
(8.21)
,
(8.21)
где I – выходной токовый сигнал датчика равный 4÷20 мА,
Р – перепад давления равный 16 кгс/см2:
![]() мА/( кгс/см2).
мА/( кгс/см2).
Коэффициент передачи отборного устройства Кот для уравнительного сосуда с частично обогреваемой плюсовой линией будет равен:
Кот
= 0,97 – 0,0009·![]() (8.22)
(8.22)
![]() ,
,
где Qmin = 0,3·Qmax = 0.3 · 17,6 = 5,28 т/ч – наименьший массовый расход
Передаточная функция демпфера измерительной цепи регулятора:
![]() ,
(8.23)
,
(8.23)
где Тдф – настраиваемая величина, с;
для регулятора типа Ремиконт – 130: Тдф = 0,04+α·1,32,
где α – значение потенциометра “Демпфер” в регуляторе (изменяется от 0 до 1).
При максимальном
значении α = 1 находим передаточную
функцию демпфера
![]()
Расчет параметров
передаточной функции объекта
![]() .
(8.24)
.
(8.24)
Плотность воды на линии насыщения ρ1 и плотность пара на линии насыщения ρ2: ρ1 = (Рб) = 887,154 кг/м3, ρ2 = (Рб) = 5,145 кг/м3.
Коэффициент
передачи: ε =
![]() ,
,
где F = dб · Lб = 1 ∙ 7.5 = 7.5 м2 – площадь зеркала испарения в барабане.
Время запаздывание τз выбираем в зависимости от давления в барабане котла Рб=1 МПа: τз = 25 с.
Передаточная
функция объекта:
![]() .
.
8.2.2 Расчет границы области заданного запаса устойчивости
При расчете границы области заданного запаса устойчивости будем использовать метод расширенных амплитудно-фазо-частотных характеристик (РАФЧХ). Для ПИ-регулятора с передаточной функцией
![]() =
C1
+ C0/Р,
его РАФЧХ (8.25)
=
C1
+ C0/Р,
его РАФЧХ (8.25)
![]() (8.26)
(8.26)
Исходными для определения границы области заданного запаса устойчивости m = mзд = 0,478 является выражение
По формулам (8.12) рассчитаем границу заданного запаса устойчивости для данной передаточной функции (ф. 8.25) в оболочке Mathcad 2001 Professional (приложение В), численные значения сведем в таблицу 8.7. По этим численным значения в пространстве параметров настройки построим границу заданного запаса устойчивости (рисунок 8.9), по которой, используя первый интегральный критерий, определяем оптимальные параметры настройки регулятора:
– коэффициент
регулятора: ![]() %/mA;
%/mA;
– время изодромы:
![]() с.
с.
Передаточная характеристика ПИ-регулятора имеет вид:
 ,
%/mA.
(8.27)
,
%/mA.
(8.27)
В таком случае передаточная функция стабилизирующего регулятора в численном виде будет выглядеть:
 ,
%/mA.
,
%/mA.
Таблица 8.7 – Расчетные значения параметров настройки
Кр |
Кр/Ти |
-12,5 |
0 |
-8,975 |
0,038 |
-5,497 |
0,128 |
-2,35 |
0,234 |
0,274 |
0,328 |
2,273 |
0,39 |
3,618 |
0,408 |
4,343 |
0,38 |
4,523 |
0,31 |
4,264 |
0,209 |
 Рисунок
8.9 – Построение границы заданного запаса
устойчивости
Рисунок
8.9 – Построение границы заданного запаса
устойчивости
Построение процессов регулирования и оценка их качества
Переходный процесс рассчитываем по следующей передаточной функции
![]() .
(8.28)
.
(8.28)
численным методом вычислением интеграла ф. (8.17) в оболочке Mathcad 2001 Professional (приложение Г).
Результаты расчета сведем в таблицу 8.8.
Таблица 8.8 - Расчетные значения переходного процесса
-
t, c
Y(t)
0
0
10
0,506
20
0,813
30
0,993
40
1,07
50
1,081
60
1,06
70
1,031
80
1,008
90
0,994
100
0,989
110
0,99
120
0,993
130
0,997
140
0,999
150
1
160
1,001
170
1,002
180
1,002
190
1,001
200
1
Рисунок 8.10 – Переходный процесс замкнутой системы по каналу f
По разработанной программе на кафедре АТП RAF1S “Расчет параметров настройки ПИ-регулятора в системе с объектом” ф. (8.18) и построим график переходного процесса объекта управления по каналу S.
Для этого введем исходные данные:
![]() (кгс/см2)/%;
T0
= T2
= T3
= 0; Т1
= 1 с; m
= 0,478, а также полученные раннее ОПН
регулятора.
(кгс/см2)/%;
T0
= T2
= T3
= 0; Т1
= 1 с; m
= 0,478, а также полученные раннее ОПН
регулятора.
Получаем переходный процесс по каналу возмущения, идущего со стороны регулирующего органа (рисунок 8.11). Результаты расчета сведем в таблицу 8.9.
Таблица 8.9 - Расчетные значения переходного процесса по каналу S
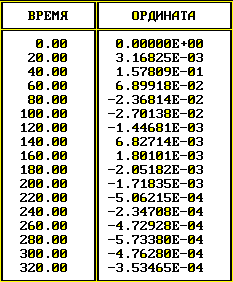
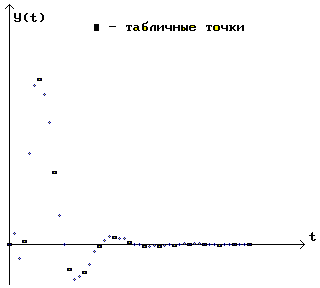
Рисунок 8.11 – Переходный процесс замкнутой системы по каналу S
Произведем прямую оценку качества полученных переходных процессов регулирования по следующим показателям:
а) длительность процесса регулирования – время, по истечении которого отклонение регулируемой величины от установившего состояния не будет превышать некоторой, наперед заданной величины δ = 0,05 ∙ y(∞) = 0,05 ∙ 1 = 0,05,
по каналу f tр = 64 с;
по каналу S tр = 110 с;
б) степень затухания
по каналу f Ψ =
![]() ,
,
по каналу S Ψ =
![]() ;
;
в) величина динамической ошибки регулирования
по каналу f А1 = 0,081,
по каналу S А1 = 0,15;
г) величина перерегулирования
по каналу f
 ;
;
по
каналу S
 .
.