

Добавил:
Upload
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:ITIS0
.pdf
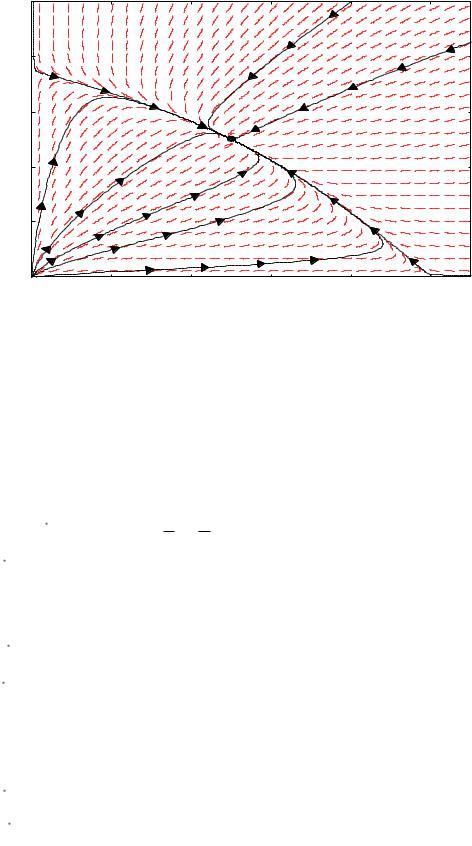
Последняя система имеет характеристическое уравнение |
k |
2 |
k 1 |
0 |
, |
|
один корень которого положителен, а другой отрицателен. Следовательно, соответствующее положение равновесия – седло. Так что данное решение первоначальной системы не будет устойчивым.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]