

Диплом / 4.4. Расчет для адаптив
.doc4.3 Расчет оптимальных параметров настройки адаптивной системы автоматического регулирования
В теории автоматического управления разработаны различные методы расчета АСР при заданных критериях качества, а так же методы оценки качества переходных процессов при заданных параметрах объекта и регулятора. При этом на ряду с точными методами, требующих большие затрат времени и ручного труда разработаны приближенные методы позволяющие сравнительно быстро оценить рабочие параметры регулятора или качество переходных процессов (метод Циглера – Никольса для расчета настроек регуляторов; приближенные формулы для оценки интегрального квадратичного критерия и т.п.).
При определении настроек регуляторов в качестве показателя оптимальности системы регулирования обычно выбирают интегральный критерий качества (например, интегральный квадратичный критерий) при действии на объект наиболее тяжелого возмущения с учетом добавочного ограничения на запас устойчивости системы. В практических расчетах запас устойчивости удобно характеризовать показателем колебательности системы; его значение для систем, имеющих интегральную составляющую в законе регулирования, определяется максимумом амплитудно-частотной характеристики замкнутой системы регулирования.
В дальнейшем под оптимальными будем понимать настройки регулятора, обеспечивающие заданную степень колебательности m процесса регулирования при минимуме интегрального квадратичного критерия Jкв.
Среди инженерных методов расчета настроек регуляторов одни являются более точными, но трудоемкими для ручного счета, другие – простыми, но приближенными. Наиболее распространенными способами, отражающими методику точного и приближенного расчета настроек, являются метод расширенных амплитудно-фазовых частотных характеристик (РАФЧХ) и метод незатухающих колебаний (Циглера – Никольса).
Метод незатухающих колебаний (Циглера—Никольса). В соответствии с этим методом расчет настроек ПИ- или ПИД-регуляторов проводят в два этапа: 1—расчет критической настройки пропорциональной составляющей S1кр(S0 = S2 = 0), при которой АСР будет находиться на границе устойчивости, и соответствующей ей кр; 2 – определение по S1кр и кр оптимальных настроек S1*, S0*, S2*, обеспечивающих степень затухания 0,8 – 0,9.
Уравнения для расчета S1кр и соответствующей ей частоты при т = 0:
об() + = 0; S1кр = [Aоб(кр)] –1.
Оптимальные настройки ПИ- и ПИД-регуляторов находят по следующим формулам:
для П-регулятора
S1* = 0,5S1кр
для ПИ-регулятора
S1* = 0,45S1кр;
S0*/S1* = 0,19кр или S0* = 0,086S1кркр;
для ПИД-регулятора
S1* = 0,6S1кр;
S0*/S1* = 0,32кр или S0* = 0,192S1кркр;
S2*/S1* = 0,785/кр или S2* = 0,471S1кр/кр;
Метод Циглера – Никольса лежит в основе многих методов настройки дискретных ПИД-регуляторов. В частности, если рекуррентный алгоритм управления, соответствующий аналоговому ПИД-закону, имеет вид
![]() ,
,
то для больших значений периода квантования t0 параметры настройки K1*, K0*, K2* могут быть найдены по следующим формулам:
для П-регулятора
K1* = 0,5 K1кр;
для ПИ-регулятора
K1* = 0,45 K1кр – 0,5 K0*;
K0* = 0,54 K1крt0/Tкр, если 0,25t0;
для ПИД-регулятора
K1* = 0,6 K1кр – 0,5 K0*;
K0* = 1,2 K1крt0/Tкр, если 0,25t0;
K2* = 3/40 K1кр Tкр/t0.
В приведенных уравнениях K1кр и Tкр – коэффициент при П-составляющей закона управления и период колебаний выходной координаты, соответствующие режиму незатухающих колебаний АСР.
Опишем процесс самонастройки в созданной модели адаптивной системы автоматического управления.
Первый этап. Все переключатели находятся в первом положении. В регуляторе устанавливаются настройки, гарантирующие устойчивость замкнутой системы с двумя заграждающими фильтрами: Кр = 0,7; Ти = 60 с. В генераторы синусоидальных колебаний Г1, Г2 вводятся начальные значения амплитуд а1, а2 и периодов Р1, Р2 колебаний. Нормированный период колебаний низкочастотного генератора Г1 был принят Р1 = 28, а генератора Г2 – соответственно вдвое меньше, т.е. Р2 = 14. Амплитуда генератора Г1 а1 = 5%, а генератора Г2 выбрана вдвое больше, т.е. а2 = 10%. Таким образом, генератор Г1 является ведущим, а Г2 – ведомым, для которого двукратное соотношение амплитуд и частот сохраняется на протяжении всего этапа работы системы.
Сигнал задания для блоков фазовой автоподстройки частоты с помощью переключателя П5 устанавливается в соответствии с методом Циглера – Никольса на уровне Фз = –.
После проведения таких подготовительных операций в работу включается генераторы синусоидальных колебаний, и блок фазовой автоподстройки частоты путем изменения нормированного периода колебаний Р1 начинает отслеживать заданный фазовый сдвиг.
В конце первого этапа для нормированных периодов колебаний Р1 = 36 и Р2 = 18 установившееся значение фазового сдвига и амплитуды для низкочастотной составляющей в сигнале у1 приняли следующие значения: Фб = –3,146 рад, Аб = 4,2453% и соответственно Ф0 = –4,2 рад, А0 = 3,859% для высокочастотной составляющей в сигнале у.
По этим значениям с помощью вычислительного блока 1 рассчитывается поправочный коэффициент С = Аба2/(А0а1) и требуемые по методу Циглера – Никольса настройки ПИ-регулятора:
Кр = 0,45а1/Аб; Ти = Р1/0,5.
В данном случае С = 2,2; Кр = 0,53; Ти = 72. Таким образом, критерием окончания первого этапа является достижение фазой Фб установившегося значения, близкого к –.
Второй этап. По команде блока управления проводятся следующие операции: вычисленные настройки вводятся в регулятор Р; поправочный коэффициент С запоминается в ЗУ1; отключается низкочастотный генератор Г1 и синхронный детектор СД1; в высокочастотном генераторе Г2 сохраняются нормированный период и амплитуда, соответствующая концу первого этапа; в ЗУ2 запоминается значение фазового сдвига в ОУ; все переключатели устанавливаются в положение 2. Система продолжает работу, непрерывно удерживая с помощью синхронного детектора СД2 и блока ФАЧ значение фазового сдвига на уровне Ф0 = –4,2 рад на повышенной частоте пробных колебаний. Настройки регулятора корректируются периодически, через каждые два периода колебаний генератора. Расчет настроек на этом этапе производится по формулам:
Кр = 0,45а2/(А0С); Ти = Р2/0,25.
Отсюда видно, что наличие поправочного коэффициента позволяет оставаться на требуемом уровне.
Построим переходные процессы по каналам задающего воздействия (рис. 37) и возмущения, идущего со стороны регулирующего органа (рис. 38). Переходные процессы построены при настройках регулятора обеспечивающих устойчивость замкнутой системы (t < 700 c) и при настройках полученных в процессе адаптации (t 700 c).
h(t),
oC
t,
c
Рис. 37. Переходный процесс в адаптивной системе автоматического регулирования по каналу задающего воздействия
t,
c
h(t),
oC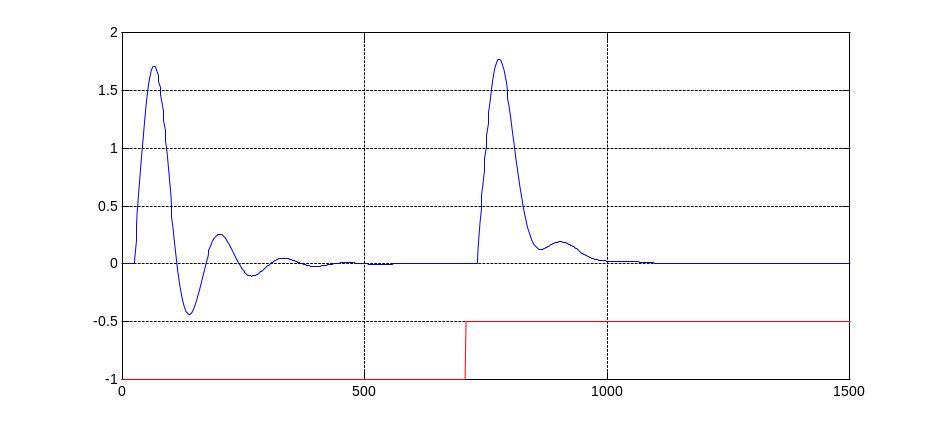
Рис. 38. Переходный процесс в адаптивной системе автоматического регулирования по каналу возмущения, идущего со стороны регулирующего органа
Оценим качество переходного процесса полученного после процесса адаптации.
Перерегулирование:
= A3/A1100% = 18,5%.
Время регулирования:
tp = 203 c.
Максимальная динамическая ошибка:
А1 = 0,32
Степень затухания:
= (A1 – A2)/A1 0,95.
Следует заметить, что при изменении коэффициента усиления объекта поправочный коэффициент С остается постоянным. Необходимость повторения первого этапа с целью уточнения значения коэффициента С возникает только при значительных (в 2 раза и более) изменениях постоянных времени и запаздывания в объекте (табл. 7). В этой таблице приведены значения параметров настройки ПИ-регулятора по методу Циглера – Никольса для объекта управления при двукратном изменении относительно номинала (97,7 с) его постоянной времени Т (48,85 и 195,4 с) и значения параметров настройки при тех же вариациях постоянной времени Т на втором этапе самонастройки при фиксированном значении поправочного коэффициента С = 2,2.
Как видно из табл. 7 уход настроек от расчетных значений весьма незначительный и составляет не более 16% по коэффициенту усиления регулятора.
Таблица 7
Значения параметров настройки регулятора при вариации параметров объекта управления
Постоянная времени Т, с |
Значения параметров настройки по методу Циглера – Никольса |
Значения параметров настройки на втором этапе |
||
Кр |
Ти |
Кр |
Ти |
|
48,85 |
0,295 |
67 |
0,362 |
69,1 |
195,4 |
1,014 |
75,83 |
1,12 |
72,5 |