

Диплом / 3.2. Типовая схема регулирования температуры ГД
.doc3.2 Типовая схема регулирования температуры горячего дутья
Энтальпия горячего дутья является важной статьей теплового баланса доменной плавки, поэтому регулирование температуры дутья на оптимальном для данных условий уровне дает значительный эффект.
Постоянство температуры дутья при прочих равных условиях способствует ровному высокопроизводительному ходу печи, при этом меньше колеблется температура в горне и стабилизируются химический состав и температура чугуна на выпусках. Изменение задания регулятору температуры дутья является наиболее простым и удобным методом коррекции при отклонениях теплового режима от оптимального.
Нагревом дутья можно в известной мере управлять газодинамикой процесса, так как при изменении температуры дутья изменяется объем, а следовательно, и скорость газового потока. Колебания температуры дутья допустимы в пределах, обусловленных аккумулирующей способностью печи, однако резкое повышение температуры может вызвать резкое сокращение окислительной зоны у фурм, вследствие чего возможно подстывание гарниссажа в заплечиках и ухудшение условий схода шихтовых материалов в горне. Поэтому повышаются требования к точности регулирования температуры дутья [36].
Система регулирования температуры горячего дутья принципиально не отличается от типовой схемы регулирования температуры. Она состоит из термоэлектрического датчика, электронного потенциометра, ПИД (или ПИ)-регулятора с задатчиком, исполнительного механизма при смесительном клапане. Регулятор автоматически устанавливает такое соотношение горячего и холодного воздуха, поступающего в смесительный воздухопровод, при котором в зоне установки термоэлектрического датчика поддерживается заданная температура горячего дутья. Техническая структура системы автоматического регулирования температуры ГД представлена на рис. 7.

Рис. 7. Техническая структура системы автоматического регулирования температуры горячего дутья; ОУ – объект управления; Д – датчик; ЗД – задатчик; УУ – устройство управления; БРУ – блок ручного управления; ИМ – исполнительный механизм; РО – регулирующий орган; ИП – индикатор положения
Однако следует отметить некоторые особенности объекта, которые необходимо учитывать при проектировании и наладке системы автоматического регулирования температуры горячего дутья.
1. В системе возникают два типа существенно различных возмущающих воздействий:
а) резкое и глубокое возмущение при очередном переходе с остывшего на нагретый воздухонагреватель, вызванное тем, что смесительный клапан в этот момент полностью закрыт, а в смесительный воздухопровод поступает дутье с максимальной температурой;
б) монотонное, плавное возмущение, которое возникает после ликвидации последствий первого. В это время регулятор постепенно закрывает смесительный клапан, компенсируя снижение нагрева дутья по мере остывания воздухонагревателя.
2. Воздухонагреватели отличаются по своим характеристикам, их расположение относительно места установки датчика температуры несимметрично, что несколько изменяет динамические характеристики объекта.
3. Расход холодного воздуха через смесительный клапан при низких температурах дутья, которые возможны при разогреве печи или при специальных условиях, достаточно велик, поэтому сечение смесительного клапана приходится выбирать довольно большим. При этом рабочие характеристики смесительного клапана в нормальном режиме, при высокой температуре дутья оказываются неудовлетворительными. В этом случае предусматривается установка двух регулирующих заслонок: для высоких температур — меньшего диаметра (порядка 0,5 м), а для низких — большего (1,2—1,5 м). Переключение с одного клапана на другой может осуществляться автоматически или вручную специальным устройством [35].
Вследствие неравномерного распределения горячего и холодного воздуха по сечению смесительного воздухопровода наблюдается неравномерность температур воздуха в различных фурмах и затрудняется выбор представительной точки для измерения температуры дутья. На некоторых доменных печах предусматриваются специальные турбулизирующие устройства, улучшающие смешение воздуха перед его поступлением в кольцевой воздухопровод.
Для того чтобы предупредить недопустимое повышение температуры дутья в момент перехода с остывшего воздухонагревателя на нагретый, в современных схемах автоматического перевода воздухонагревателей предусматриваются временное отключение регулятора температуры дутья и выдача сигнала на открытие смесительного клапана. Регулятор температуры дутья включается через заданное время и доводит температуру до заданного значения без перегрева дутья.
Особенности объекта управления и высокая точность регулирования температуры дутья вызывают необходимость принимать обоснованные технические решения при проектировании систем стабилизации температуры горячего дутья для каждой доменной печи.
3.3 Создание модели адаптивной системы автоматического регулирования
Общепринятый порядок синтеза систем управления состоит в следующем:
задается математическая модель объекта (на практике это обычно экспериментальная переходная характеристика объекта);
принимается критерий оптимальности системы управления;
по модели объекта определяются структура и численные значения параметров алгоритма функционирования контроллера (регулятора), удовлетворяющие принятому критерию оптимальности.
Считается, что если модель достаточно близка к реальному объекту, а выбранный метод синтеза и сами расчеты выполнены безукоризненно, то спроектированная система заработает без какой-либо существенной доводки при пуске. Однако опыт свидетельствует о том, что такой оптимистический прогноз, как правило, не оправдывается. Объясняется это двумя причинами:
системным характером задачи получения математической модели объекта; это значит, что для формулировки критерия приближения последней необходимо располагать алгоритмом функционирования контроллера, для определения которого собственно и нужна эта модель [74];
практической невозможностью учета отклонения принимаемой в расчетах динамической модели контроллера от реальной (наличия широтно-импульсного преобразования сигнала на выходе контроллера, зоны нечувствительности, люфтов в механических сочленениях исполнительного механизма и т. п.)
Выход из сложившейся ситуации состоит в том. что системы управления даже относительно стабильными объектами должны проектироваться как адаптивные (с автоматизированной настройкой) [74, 2]. Эффективность таких систем определяется тем, что они оперируют всей системой в целом, причем при соответствующем выборе режима идентификации можно осуществлять автоматическую линеаризацию нелинейности в значительном для каждой конкретной системы диапазоне частот и отклонений сигналов [75].
Разработка систем управления должна быть двухэтапной.
1. Выдвижение гипотез о структуре системы и ее алгоритмах управления и регулирования (в том числе алгоритмов адаптации), получение начальной (часто эта модель называется априорной) математической модели объекта и расчет по ней оптимальных параметров настройки выбранных алгоритмов с последующей проверкой их работоспособности на имитационных моделях.
2. Окончательная адаптация с помощью специализированных сервисных алгоритмов полученной на предыдущем этапе системы к реальным условиям работы на действующем объекте при вводе ее в эксплуатацию. Алгоритмы адаптации включаются в состав общего алгоритмического обеспечения системы и остаются в работе на весь период ее эксплуатации, поскольку свойства элементов системы могут меняться во времени.
В функции адаптации не входит подстройка параметров регуляторов к относительно быстро меняющимся свойствам объекта, вызванным контролируемыми возмущениями, прежде всего – изменениями нагрузки объекта. В этом случае должна применяться обычная коррекция настройки регуляторов по заранее заданным законам, реализуемым в соответствующих корректирующих блоках. Однако в функции адаптации входит настройка этих корректирующих блоков. Вообще возможности теории автоматического управления (как и любой другой теории) ограничены некоторыми пределами. При слишком быстрых изменениях свойств объекта и связанным с этим появлением нелинейных эффектов принципиальная возможность адаптации систем управления достаточно сложными в динамическом отношении объектами оказывается весьма проблематичной.
Обычно структура, адаптивной системы управления представляется такой, как показана на рис. 8: к контуру регулирования, состоящему из объекта Об и регулятора Рег, подсоединяются адаптирующее устройство Ад, на вход которого подаются входной (t) и выходной y(t) сигналы объекта. В идентифицирующем устройстве Ид по этим сигналам оценивается модель объекта, а в вычислительном устройстве ВУ рассчитываются оптимальные параметры настройки регулятора, которые затем устанавливаются с помощью адаптирующего воздействия a(t).
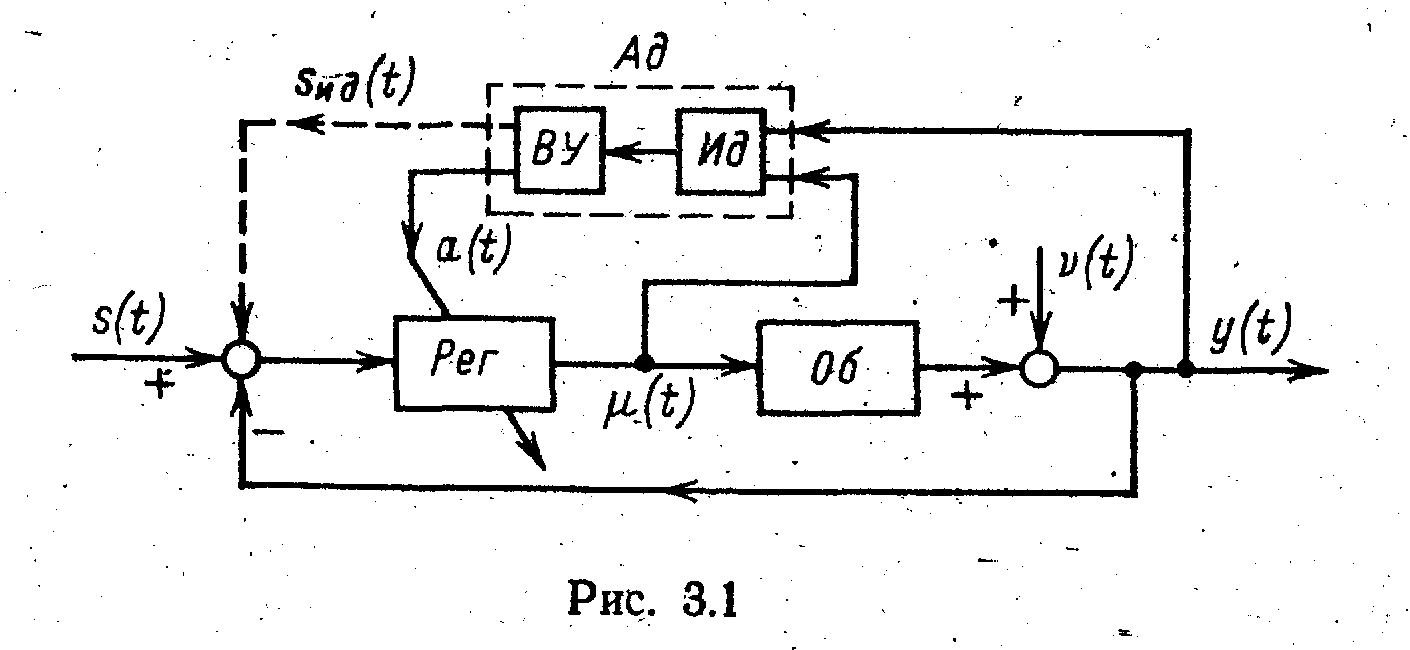
Рис. 8. Структура адаптивной системы
Процесс адаптации должен сопровождаться идентификацией объектов, что в большинстве случаев принципиально невозможно осуществить по условиям нормальной эксплуатации. Поэтому приходится использовать активный эксперимент, сопровождаемый подачей на объект специальных идентифицирующих воздействий. Такими воздействиями могут быть [2]:
специально организованное возмущение или изменение заданного значения регулируемой величины;
изменение алгоритма функционирования регулятора;
изменение структуры системы регулирования.
Далее будет рассмотрен метод адаптации, использующий сигнальное гармоническое идентифицирующее воздействие. Достоинством такого метода является возможность обоснованного применения методов математической статистики в процессе проведения итерационной процедуры движения к оптимуму [8]. Практическая значимость этого обстоятельства состоит в возможности уменьшения амплитуды воздействий до приемлемого уровня и, несмотря на это, получения удовлетворительных оценок параметров выходных колебаний благодаря увеличению продолжительности адаптации.
Пассивное наблюдение за поведением объекта в процессе нормального функционирования не приводит к успеху.
Объясняется это тем, что поскольку объект находится в составе системы, то и оперировать следует с воздействиями, являющимися входными сигналами всей системы; при этом входной сигнал следует выбрать таким образом, чтобы идентифицируемый канал системы зависел только от одного неизвестного оператора объекта.
Организации процесса оценки модели объекта структура адаптивной системы управления, приведенная на рис. 8,. должна быть дополнена еще одним, идентифицирующим воздействием, которое должно оказывать адаптирующее устройство Ад на систему с целью идентификации объекта. На рис. 8 воздействие sид(t) показано пунктирной стрелкой в виде сигнального воздействия, подаваемого на задатчик регулятора. Однако такое идентифицирующее воздействие не обязательно должно быть сигнальным. Оно может быть также параметрическим, алгоритмическим, структурным.
Чаще всего автоматическая настройка осуществляется путем включения в канал сигнала ошибки двухпозиционного реле с малым выходным сигналом. Далее по параметрам автоколебаний, возникающих в замкнутой системе, определяются требуемые настройки ПИД-регулятора. В то же время при таком способе самонастройки происходит прекращение процесса регулирования объекта на время настройки, наблюдается высокая чувствительность к шумам в канале измерения, возникает опасность срыва автоколебаний при действии возмущений.
Существует алгоритм настройки ПИД-регулятора в замкнутом контуре путем подачи на вход системы пробного синусоидального сигнала Однако для этого алгоритма требуется достаточно большое время настройки (около восьми, десяти периодов колебаний на резонансной частоте замкну той системы).
В данной работе используется метод Циглера - Никольса с частотным разделением каналов управления и самонастройки, что достигается включением двух заграждающих цифровых фильтров в обратную связь контура регулирования.
Для повышения быстродействия процесса самонастройки предлагается работать на первом, начальном этапе самонастройки на двух частотах пробного сигнала, одна из которых больше критической частоты объекта управления. Возможность работы блока адаптации на частотах, больших критической частоты, объясняется тем, что для объектов с запаздыванием увеличение частоты пробных колебаний сопровождается значительно меньшим снижением амплитуды выходной гармоники по сравнению с объектами без запаздывания.
На рис. 9. приведена структурная схема такой адаптивной системы управления. Основной контур системы состоит из настраиваемого регулятора Р, собственной объекта управления ОУ и двух заградительных фильтров (основного ЗФО и дополнительного ЗФД). Дополнительный фильтр с помощью переключателя П1 включается лишь на первом этапе либо периодически для определения требуемых по методу Циглера – Никольса настроек. Блоки синхронного детектирования СД1, СД2 вычисляют установившиеся значения амплитуд Аб, А0 и фаз Фб, Ф0 пробных составляющих в выходных сигналах основного заграждающего фильтра у1 и объекта управления у. Отслеживание заданного фазового сдвига осуществляется с помощью блока фазовой автоподстройки частоты БФАЧ. Путем сравнения установившегося значения фазового сдвига Ф0 с заданным Фз блок корректирует частоты пробных синусоидальных колебаний первого Г1 и второго Г2 генераторов. Причем частота генератора Г2 выбрана вдвое выше частоты генератора Г1. Вычислительные блоки ВБ1, ВБ2, ВБ3 по командам блока управления БУ проводят вычисления поправочного коэффициента С, параметров настройки регулятора и коэффициентов заграждающих фильтров. В запоминающих устройствах ЗУ1, ЗУ2 хранятся значения коэффициента С и фазового сдвига Ф0 в объекте управления в момент расчета требуемых настроек. По командам блока управления с помощью переключателей П3, П4, П5, П6 происходит коммутация входных сигналов соответствующих блоков на разных этапах работы системы.

Рис 9. Структурная схема разрабатываемой адаптивной системы автоматического управления
Процесс самонастройки состоит из двух этапов: двухчастотного, в конце которого вычисляются требуемые настройки и коэффициент С; основного, в котором процесс самонастройки происходит уже на одной повышенной частоте пробных колебаний с одним заграждающим фильтром ЗФО в контуре обратной связи. Именно определение критической частоты и соответствующую ей амплитуды колебаний для блока ОУ+ЗФО позволяет работать с нужными параметрами настроек на втором этапе. Достигается это с помощью поправочного коэффициента С, устанавливающего связь между требуемыми по методу Циглера – Никольса настройками на первом и втором этапах работы системы.
Результаты данного раздела использованы в хоздоговоре №11/02 ТУСУРа с ЗАО «ЭлеСИ» (П.1).
3.4. Разработка системы автоматического регулирования температуры горячего дутья с переменной структурой
Большие дополнительные возможности улучшения процессов регулирования дает нелинейное управление работой объекта путем изменения структуры управляющего устройства в зависимости от размеров и знаков входных величин, поступающих в управляющее устройство от измерительного устройства.
При этом могут использоваться комбинации линейных законов регулирования (их достоинства, обходя недостатки). Например, если известно, что при одном законе регулирования получается быстрое начальное изменение регулируемой величины, но с большими последующими колебаниями (И закон), а при другом линейном законе регулирования – медленное изменение, но плавный подход к новому установившемуся режиму (П закон), то можно, включив сначала первый закон, переключить затем систему на второй закон в некоторой точке A, когда отклонение x достигнет определенного значения, xA. В результате процесс регулирования изобразится кривой (рис. 10), объединяющей оба качества – быстроту и плавность процесса [11]. Используя данный подход мы получаем процесс регулирования без характерных ПИ- (ПИД-) регуляторам колебания и максимальной динамической ошибки.

Рис. 10. Переходный процесс в системе с переменной структурой
Если в такой системе с переменной структурой все звенья линейны, то за счет указанного переключения, происходящего автоматически в процессе регулирования, система становится нелинейной. Это можно сравнить с тем, как получается нелинейная статическая характеристика из отрезков прямых линий. Но здесь имеет место нелинейная динамическая характеристика, составляемая из последовательности разных линейных дифференциальных уравнений, соответствующих первому и второму законам регулирования.
Выбор структуры системы осуществлялся исходя из предположения, что совокупность функциональных элементов и характер связей между ними остаются раз и навсегда неизменными. Однако такой взгляд на проектирование систем управления, вообще говоря, не является единственным. Действительно, при синтезе управляющего устройства можно заранее ввести в структуру системы такие функциональные элементы, которые во время протекания процесса управления изменяют знак обратной связи, скачкообразно изменяют коэффициенты воздействия по различным координатам и т.д., т.е. изменяют структуру системы. Тогда в зависимости от выбранного алгоритма и имеющейся информации система будет обладать той или иной структурой. Можно предположить, что в такой системе удастся сочетать полезные свойства каждой из имеющейся совокупности структур, а быть может, и получить какие-либо новые свойства, не присущие любой из них. Следует ожидать, что такой подход позволит существенно повысить эффективность управления.
Рассмотренный систему с перестраиваемой структурой. В дальнейшем под системами с перестраиваемой структурой (СПС) будем понимать системы, в которых связи между функциональными элементами меняются тем или иным образом в зависимости от состояния системы. В таких системах управляющее устройство содержит ключевые элементы, которые в соответствии с выбранным логическим законом разрывают или восстанавливают различные каналы передачи информации, в результате чего изменяется структура системы [29].
На рис. 11 представлена достаточно общая схема системы с перестраиваемой структурой. В зависимости от того, какие координаты системы и внешние воздействия доступны для измерения, на вход управляющего устройства (УУ) может поступать информация о величине ошибки х, выходной координате исполнительного устройства у, задающем и возмущающем воздействиях g(t) и f(t), о регулируемой величине , о промежуточных координатах объекта 1,…,i и исполнительного устройства y1,…,yk. Управляющее устройство содержит некоторую совокупность функциональных звеньев, причем оператор каждого из них обозначен на рис. 11 буквой А с соответствующими индексами. Каждая из входных величин управляющего устройства может поступать на входы только «своих» звеньев. На рис. 11 верхний индекс оператора А говорит о входной величине звена, а нижний индекс указывает на его порядковый номер. Управляющее воздействие и является суммой выходных величин всех звеньев. В управляющем устройстве имеются ключевые элементы (КЭ). Каждый ключевой элемент замыкает один из предусмотренных каналов передачи информации. Всевозможные сочетания положении контактов КЭ определяют совокупность имеющихся в распоряжении фиксированных структур. Блок изменения структуры (БИС) на основе анализа всей поступающей на управляющее устройство информации дает команду на изменение структуры системы. Задача синтеза такой СПС состоит в выборе операторов всех звеньев и логических законов, в соответствии с которыми изменяется структура системы.

Рис. 11. Общая структурная схема системы с перестраиваемой структурой
На рис. 12 представлена схема автоматического регулирования температуры горячего дутья с перестраиваемой структурой. В схему входит блок измерения (ИзУ), который производит непрерывную оценку регулируемой величены и вычисляет величину сигнала рассогласования, который подает на блок формирователя функции переключения, осуществляющий анализ и переключение сигнала отклонения регулируемой величины (t) на необходимый закон регулирования (блок коммутируемых коэффициентов).

Рис. 12. Схема автоматического регулирования температуры горячего дутья с перестраиваемой структурой; БК – блок коммутируемых коэффициентов; ИзУ – измерительное устройство; ФФП – блок формирования функции переключения; ИУ – исполнительное устройство
Результаты данного раздела опубликованы в работах [111, 113].