

4.2.2 Определение параметров настройки регуляторов с помощью номограмм
Номограммы для ПИ-регулятора
Номограммы №1 и 2 [83] составлены для двух значений степени затухания = 0,75 и = 0,9. Для пользования ими необходимо располагать соответствующими (т.е. для = 0,75 или для = 0,9) расширенными амплитудно-фазовыми характеристиками объекта:
W(m,i) = A(m,)exp[i(m,)].
Желательно при этом, чтобы расширенная амплитудно-фазовая характеристика объекта W(m,i) была графически (или таблично) представлена расширенной фазо-частотной характеристикой (m,) в диапазоне от 80 – 90 до 170 – 180о и соответствующим участком расширенной амплитудно-частотной характеристики А(m,).
Последовательность действий при работе с номограммой.
1. Выбираем такую постоянную величину a[*/*], при которой
Аmax/a 1 и Аmin/a 1,
где Аmax, Аmin – наибольшее и наименьшее соответственно значения модуля в рассматриваемом диапазоне частот от 1 до n; * – размерность регулируемой величины ; * – размерность возмущающего воздействия .
2. Каждому значению частоты соответствует точка в плоскости настроек регулятора (I квадрант). На рис. 29 показано нахождение точки для частоты 2.

Рис. 29. Схема пользования номограммой
3. Соединяем найденные точки 1, 2, 3, …, n в I квадранте номограммы плавной кривой Tи/a = f(Tи).
4. Значения параметров настройки ПИ-регулятора, обеспечивающие близкие к оптимальному переходные процессы в системе регулирования, соответствуют точкам, лежащим несколько правее минимума этой кривой (точки 4, 5 на рис. 29).
Данный метод заметно экономит время и дает достаточно точные результаты при определении оптимальных параметров настройки регуляторов, но он неудобен тем, что требуется наличие номограмм.
4.2.3 Графо-аналитический метод определения параметров настройки регуляторов
В ряде случаев приходится определять оптимальную настройку регулятора по расширенной амплитудно-фазовой характеристике объекта, заданной не аналитически, а в виде графика. Сущность этого способа заключается в следующем.
Выше указывалось, что при расчете устойчивости системы автоматического регулирования исходным является равенство
Wоб(i)Wp(i) = 1 или Wоб(i) = 1/Wp(i),
т.е. Аоб()exp(iоб()) = exp(-ip())/Ap().
Левая часть этого равенства соответствует вектору амплитудно-фазовой характеристики объекта, а правая – вектору обратной (инверсной) амплитудно-фазовой характеристики регулятора.
Эти векторы могут быть равны в том случае, если для каждого значения частоты угол опережения регулятора р() будет равен углу отставания об(), а величина, обратная коэффициенту усиления регулятора 1/ Ap(), будет равна коэффициенту усиления объекта Аоб().
На рис. 30 для примера приведены прямая (а) и обратная (б) амплитудно-фазовые характеристики (нормальная и расширенная) ПИ-регулятора. Цифрами на кривых отмечены значения Tи.
Наложим амплитудно-фазовую характеристику объекта на обратную амплитудно-фазовую характеристику регулятора (рис. 31). Каждой точке обратной амплитудно-фазовой характеристики регулятора 1/Wp(i) в масштабе 1/ соответствует вектор, модуль которого равен 1/Ap(), угол отставания p(1), а относительная частота равна (Tи)1.
К аждой
точке амплитудно-фазовой характеристики
объекта MWоб(i)
соответствует вектор с модулем
МАоб(2),
углом отставания p(2)
и частотой 2.
Модули векторов – размерные величины,
масштаб которых М выбирается
произвольно.
аждой
точке амплитудно-фазовой характеристики
объекта MWоб(i)
соответствует вектор с модулем
МАоб(2),
углом отставания p(2)
и частотой 2.
Модули векторов – размерные величины,
масштаб которых М выбирается
произвольно.
Для выполнения условия необходимо, чтобы
Aоб() = 1/Ap(),
об() = p().
Проведем из начала координат (рис. 31) луч 0 – 2 под углом (3), которому соответствуют модуль 1/Ap(3) вектора обратной амплитудно-фазовой характеристики регулятора Wp(i) и относительная частота (Ti)3. Лучу 0 – 1, проведенному из начала координат под тем же углом об(3) = р(3), соответствует модуль МA(3)об вектора амплитудно-фазовой характеристики объекта Wоб(i).
Возьмем отношение отрезков 0 – 1 и 0 – 2:
![]() .
.
Имея в виду условие , т.е. Aоб(3)Ap(3) = 1, получаем
![]() .
.
Таким образом, отношение отрезков 0 – 1 и 0 – 2 для конкретного угла (3) определяет значение первого параметра настройки регулятора – коэффициента обратной связи 3.
Вместе с тем вектору 0 – 2 обратной амплитудно-фазовой характеристики регулятора соответствует относительная частота (Tи)3/3, а вектору 0 – 1 амплитудно-фазовой характеристики объекта – частота 3. Следовательно, отношение (Tи)3/3 для конкретного угла (3) определяет значение второго параметра настройки ПИ-регулятора – времени интегрирования (Tи)3.
При этом значение коэффициента обратной связи получается в масштабе М, выбранном для графика амплитудно-фазовой характеристики объекта, а значение времени интегрирования – непосредственно в секундах (если выражается в рад/с).
Аналогичными приемами могут быть определены значения параметров настройки регулятора и Tи, соответствующие иным векторам (лучам) при других углах ().
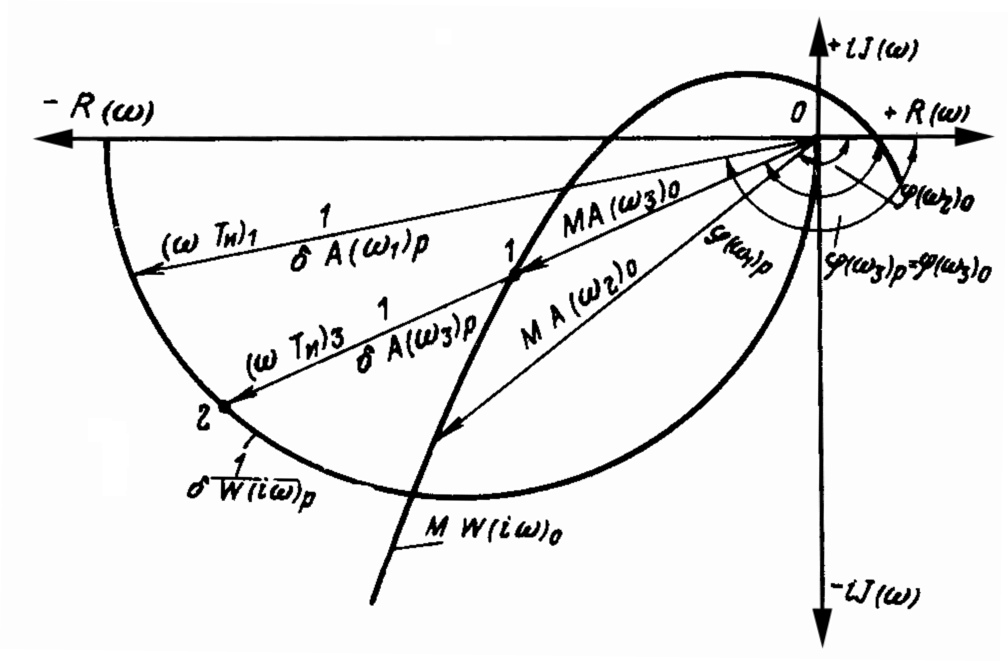
Рис. 31. Совмещение прямой частотной характеристики объекта с обратной частотной характеристикой регулятора
Определив последовательными операциями значения 1, 2, 3 и т.д. и (Tи)1, (Tи)2, (Tи)3 и т.д., можно построить в координатах С0 = 1/Tи = kp/Tи и Ci = l/ = kp линию, ограничивающую область устойчивости системы регулирования (рис. 32, а).
Определение настроек регулятора, соответствующих заданной степени затухания переходного процесса, производится аналогично по расширенным амплитудно-фазовым характеристикам из условия
Wоб(m,i)Wp(m,i) = 1.
В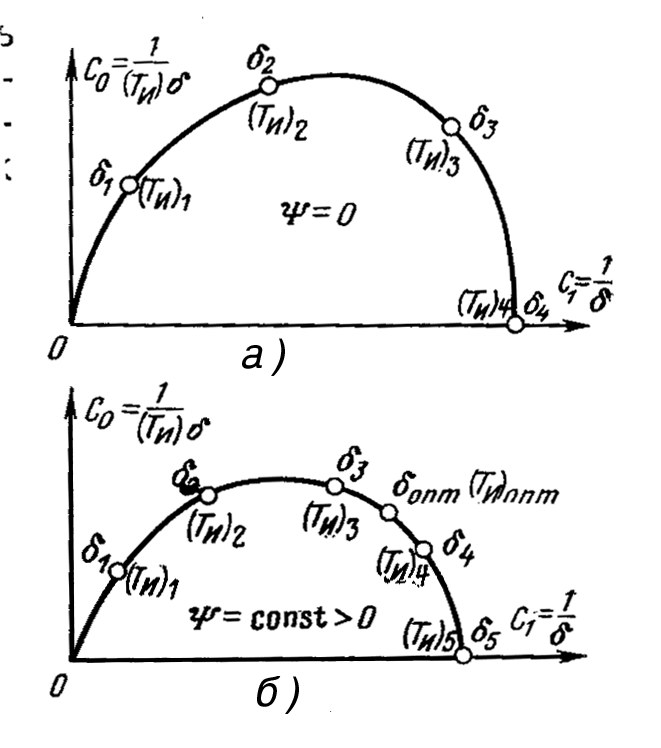
 этом случае строится линия заданной
степени затухания (например, = 0,75)
и на ней выбираются значения параметров
настройки регулятора, обеспечивающие
оптимальный переходный процесс. Так же
как при аналитическом расчете, можно
построить переходные процессы,
соответствующие конкретным настройкам,
и из них выбрать оптимальный процесс.
Однако приближенно можно рекомендовать
значение настройки, лежащее несколько
правее максимума кривой = const
(рис. 32, б).
этом случае строится линия заданной
степени затухания (например, = 0,75)
и на ней выбираются значения параметров
настройки регулятора, обеспечивающие
оптимальный переходный процесс. Так же
как при аналитическом расчете, можно
построить переходные процессы,
соответствующие конкретным настройкам,
и из них выбрать оптимальный процесс.
Однако приближенно можно рекомендовать
значение настройки, лежащее несколько
правее максимума кривой = const
(рис. 32, б).
Р ис.
32. К расчету настройки регулятора
графо-аналитическим методом
ис.
32. К расчету настройки регулятора
графо-аналитическим методом
Графо-аналитический метод определения оптимальных параметров настроек регуляторов по амплитудно-фазовой характеристике объекта является не достаточно точным, т.к. предусматривает использование графиков.