

1.3.5 Начальный механизм 0-1
Определим
уравновешивающую силу
![]() приложенную по касательной к точке
В,
которую определим из уравнения моментов
относительно точки А:
приложенную по касательной к точке
В,
которую определим из уравнения моментов
относительно точки А:
![]()
![]()
Примем:
![]()
Построив план сил, найдём:
![]()
1.3.6 Определение величины уравновешивающей силы методом рычага н.Е. Жуковского
Этот
метод позволяет определить величину
уравновешивающей силы без определения
реакции в КП, то есть без выполнения
силового расчёт групп Ассура. Для этого
необходимо план скоростей повернуть
на 90 градусов, принимаемый как
твёрдое тело, с неподвижной точкой в
полюсе. К концам векторов одноимённых
точек которого, приложены внешние силы,
в этом числе
![]() и моменты инерции Ми3,
и
Ми2
звеньев 3 и 2.
и моменты инерции Ми3,
и
Ми2
звеньев 3 и 2.
Размер плеч на рычаге Н.Е. Жуковского:


Моменты инерции на рычаге Н.Е. Жуковского:

Принимая повёрнутый на 90 градусов план скоростей как твёрдое тело (рычаг) напишем уравнение равновесия:
![]()
Из
уравнения равновесия находится
![]() :
:
![]()
![]()
Примем равным 1923.8 Н;
Знак минус говорит о том, что уравновешивающая сила направлена в обратную сторону.
Расхождение в значениях величины уравновешивающей силы, полученных из
плана сил и “рычага” Жуковского, определяемые по формуле:

Значения реакций в КП и уравновешивающей силы приведены в таблице 1.7
Таблица 1.7
|
|
|
|
|
|
|
|
|
|
Ньютоны |
|
||||||||
1680 |
430 |
2800 |
2600 |
1700 |
1700 |
1800 |
1858.8 |
1923.8 |
3.4% |
1.3.7 Определение кпд механизма
КПД является показателем степени совершенства механизма. Мгновенное значение КПД механизма вычисляется по формуле:
![]()
где:
РПС – мощность, затрачиваемая на преодоление сил производственного сопротивления.
![]()
![]() –
суммарная
мощность, затрачиваемая на преодоление
сил полезного сопротивления.
–
суммарная
мощность, затрачиваемая на преодоление
сил полезного сопротивления.
Определим радиусы цапф вращательных кинематических пар:

Примем коэффициент трения в КП равным 0.1.
Тогда моменты трения во вращательных КП:

Силы трения поступательных КП:
![]()
Определим мощности трения:

Вычислим суммарную мощность, затрачиваемую на преодоление сил полезного сопротивления:
![]()
Тогда значение КПД механизма для четвёртого положения равно:
![]() %
%
Томский политехнический университет
Кафедра теоретической и прикладной механики
КУРСОВОЙ ПРОЕКТ ПО ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Студента Машиностроительного факультета, группы 4310 Фролова В.А..
ЗУБЧАТЫЙ МЕХАНИЗМ
Синтез, анализ зубчато механизма и профилирование зацепления
Задание № 13
Схема механизма
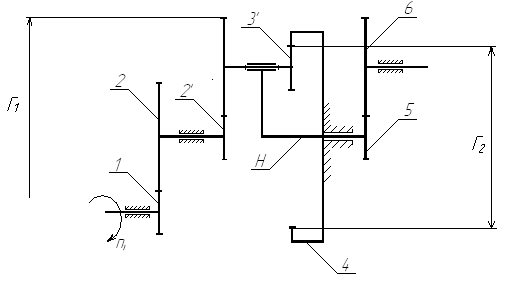
Исходные данные:
Передаточное число механизма…………………………………………………………U = 72
Число сателлитов……………………………………………………………………………………p = 3
Модули зацепления……………………………………………….………………………………….m1,2,5,6, = 3 мм
m 2,2’3,3’ = 3 мм
Частота вращения ведущего звена……………………………………………….n1 = 1200 об/мин
Дата выдачи задания:
Срок выполнения:
Руководитель: Скорых Н. В..
2. Зубчатый механизм
(ЛИСТ 2)
Введение
Целью данной работы является приобретение навыков в подборе чисел зубьев планетарного механизма, геометрического расчета зубчатого эвольвентного зацепления, кинематического исследования зубчатого механизма
По данным задания необходимо:
Произвести разбивку передаточного отношения сложного зубчатого механизма по ступеням и подобрать числа зубьев зубчатых колес, Размеры механизма должны быть минимальными
Определить основные геометрические параметры всех зубчатых колёс механизма(
Определить числа оборотов всех звеньев механизма
Провести полный геометрический расчёт одного и того же эвольвентного зацепления зубчатых колёс, нарезанных со смещением режущего инструмента (А) и без (Б – нулевые колёса). Результаты расчёта геометрических параметров зубчатых колёс свести в таблицу
5. определить КПД всего механизма (КПД, одной пары зубчатых колёс принять 0,99)