

Министерство образования Российской Федерации
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Наименование факультета: Машиностроительный факультет
Наименование выпускающей кафедры: Электропривод и электрооборудование
Наименование дисциплины: Автоматизированный привод
Лабораторная работа № 6
Системы логического управления электроприводом постоянного тока.
Исполнители: студенты группы М93 |
|
Кучерова А.Г. |
|
|
|
|
|
Сотников Н.Н. |
|
|
|
|
|
Котельников А.А. |
|
|
|
Руководитель: преподаватель |
|
Семенов С.М. |
Томск 2003
Цель работы: Изучение принципов управления пуском и остановом электрического двигателя и построение логического управления.
Паспортные данные двигателя:
Pн=0,49 кВт |
nн=2000 мин |
Uн=60 В |
Mн=4,7 Н м |
Iн=12 А |
Mм=19 Нм |
Iн=56 А |
Mм/Мн=4 |
nн=1000 мин-1 |
J=5,4 * 103 кгм2 |
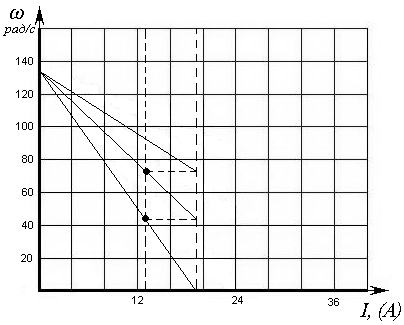
Расчет искусственных характеристик пусковых сопротивлений в цепь якоря.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ;
;![]()
![]()
![]()
Сопротивление секции реостата:
![]() первая секция
реостата
первая секция
реостата
![]() вторая секция
реостата
вторая секция
реостата
![]()
![]()
![]()
![]()
![]()
![]()

Рис. 1. График переходного процесса при пуске в 2 ступени в функции =f(w)
Imax1 = 25 А |
ω0 = 82 рад/с |
tnn1 = 1200 мс |
Imax2 = 18 А |
ωуст = 10 рад/с |
tnn2 = 580 мс |
I0 = 28 А |
|
tnn3 = 600 мс |
=Iуст = 3 А |
|
|

Рис. 2. График переходного процесса при пуске в 2 ступени в функции =f(I)
Imax1 = 18 А |
ω0 = 80 рад/с |
tnn1 = 1500 мс |
Imax2 = 20 А |
ωуст = 10 рад/с |
tnn2 = 500 мс |
I0 = 28 А |
|
tnn3 = 510 мс |
Iуст = 3 А |
|
|

Рис. 3. График переходного процесса при пуске в 2 ступени в функции =f(t)
Imax1 = 28 А |
ω0 = 90 рад/с |
tnn1 = 980 мс |
Imax2 = 24 А |
ωуст = 10 рад/с |
tnn2 = 500 мс |
I0 = 30 А |
|
tnn3 = 600 мс |
Iуст = 3 А |
|
|

Рис. 4. График переходного процесса при пуске в 2 ступени в функции =f(i)
Imax1 = 48 А |
ω0 = 7,5 рад/с |
tnn1 = 490 мс |
Imax2 = 46 А |
ωуст = 7,5 рад/с |
tnn2 = 700 мс |
I0 = 2,5 А |
|
tnn3 = 750 мс |
Iуст = 2,5 А |
|
|

Рис.5. График переходного процесса при пуске ДПТ с НВ из неподвижного состояния
Электромеханическая
постоянная времени переходного процесса
составила
![]()
Установившаяся
скорость
![]()
Момент инерции
![]()
Вывод:
1)Время разгона на первой ступени меньше, чем на второй за счет того, что в цепь якоря вводится добавочное сопротивление, что приводит у увеличению инерционности системы, что в свою очередь ведет к увеличению времени необходимого на разгон(как видно из уравнения приведённого ниже). Скорость изменяется постепенно за счет инерционности механической системы, вращающиеся части обладают массой, что приводит к тому, что скорость увеличивается по экспоненциальной зависимости (постепенно), а не скачком. Ток изменяется скачком за счет того, что носители тока, заряженные частицы, движутся со скоростью близкой к скорости.
2) Изменение скорости во время переходного процесса описывается ниже приведёнными уравнениями:
1 отрезок
![]()
2 отрезок
![]()
3 отрезок
![]()
Таким образом, скорость увеличивается по экспоненциальной кривой, до точки переключения сопротивлений. Данные уравнения позволяют определить время изменения скорости от какого – либо начального значения до значений i
3) Суммарное время переходного процесса:
а) при пуске в функции скорости составило 2380 мс
б) при пуске в функции тока составило 2510 мс
в) при пуске в функции времени составило 2080 мс
Таким образом суммарное время переходного процесса при пуске в функции скорости больше чем при пуске в функции тока и времени. Данное различие обусловлено в первую очередь тем , что в управлении используются различные элементы схемы:
При пуске в функции скорости управление основано на косвенном контроле скорости путём измерения величин, однозначно связанных со скоростью, в данном случае это ЭДС.
При пуске в функции тока для управления используется токовое реле или контактор с токовой катушкой.
При пуске в функции времени для управления используется электромагнитное реле времени
4) Согласно проведенным предварительным вычислениям токи переключения составили соответственно. Анализируя графики переходного процесса было сделано наблюдение о том, что реальные токи переключения не соответствуют расчетным.
Imax1 = 25 А Imin2 = 10 А
Данный показатель обусловлен инерционностью системы, так как введение секций реостата происходит не мгновенно, а с временным интервалом величиной в миллисекунды.
5) По графику переходного процесса при пуске ДПТ с НВ из неподвижного состояния определили электромеханическую составную времени ТМ. Она численно равна времени разбега двигателя вхолостую до скорости идеального холостого хода под действием момента короткого замыкания МКЗ.