

Лекция n10 Уравновешивание механизмов
При движении звеньев механизма в кинематических парах возникают дополнительные динамические нагрузки от сил инерции звеньев. Это возникает из-за того, что центры масс звеньев в общем случае имеют переменные по величине и направлению ускорения. Так как всякий механизм имеет неподвижное звено-стойку, то и на стойку механизма также воздействуют вполне определенные динамические нагрузки. В свою очередь через стойку эти нагрузки передаются на фундамент механизма. Динамические нагрузки, возникающие при движении механизма, являются источниками дополнительных сил трения в кинематических парах, вибраций звеньев и фундамента, дополнительных напряжений в отдельных звеньях механизма, причиной шума и т.д. Поэтому при проектировании механизма ставиться задача о рациональном подборе масс звеньев механизма, обеспечивающем полное или частичное устранение указанных динамических нагрузок. Решение подобной задачи, относящейся к динамическому проектированию механизма машины, называется его уравновешиванием.
Цель урановешивания механизмов- устранение переменных воздействий на фундамент, вызывающих нежелательные колебания, как самого фундамента, так и здания, в котором он находится
Понятие о неуравновешинности механизма (звена)
Рассмотрим плоский механизм (рис. 10.1), начальное звено 1 которого вращается с постоянной угловой скоростью. При этом все остальные звенья будут двигаться с угловыми ускорениями, а центры масс S1, S2, S3будут иметь линейные ускорения.
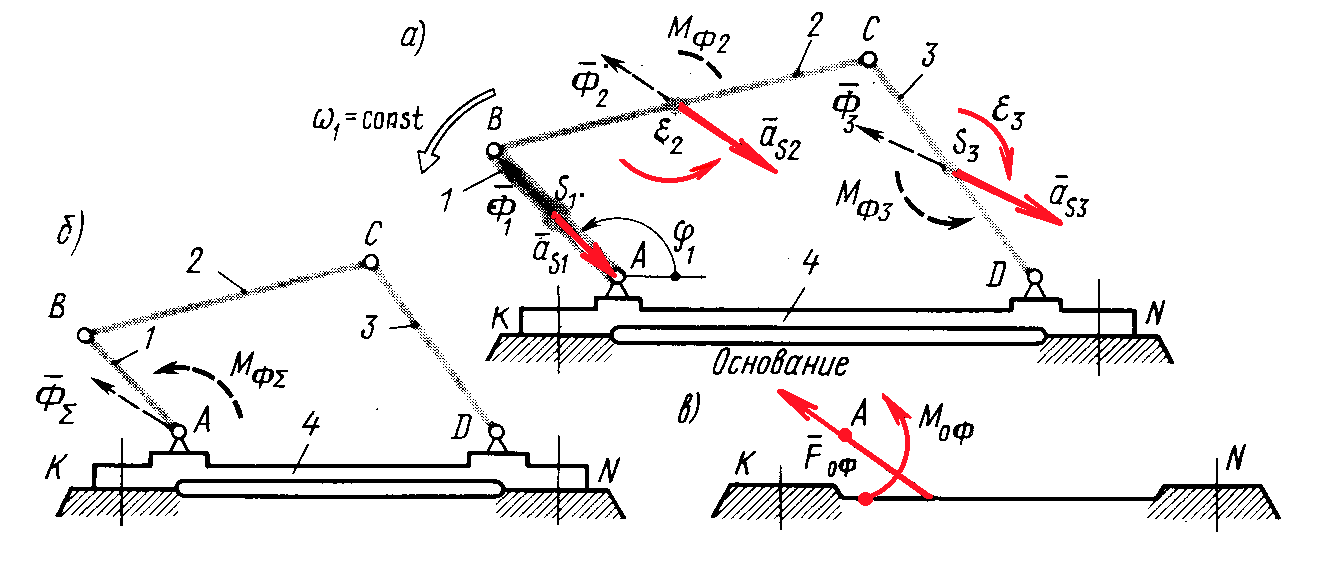
Приведем всю систему сил инерции к центру А, в результате чего вся эта система сведется к общему главному вектору:
![]() (10.1)
(10.1)
и к общему главному моменту: ![]() , (10.2)
, (10.2)
Т.к. 1= соnst, тоМФ1 =0.
Динамические составляющие нагружения основания численно равны общему главному вектору Ф и общему главному моментуМФсистемы сил инерции.
Уравновешенным считается механизм, для которого главный вектор и главный момент сил инерции равны нулю.
Если общий главный вектор сил инерции механизма Ф 0, то такой механизм называетсястатически неуравновешенным.
Если МФ 0, ноФ =0-моментная неурановешенность.
Если МФ 0иФ 0-динамическаянеурановешенность.
Полное уравновешивание рычажных механизмов является очень трудной задачей, поэтому в большинстве случаев ограничиваются их статическим уравновешиванием. Однако и его не всегда удается осуществить в полной мере. В этих случаях производят частичное статическое уравновешивание. При статическом уравновешивании механизма необходимо обеспечить условие:
Ф =0. (10.3)
Так как масса системы всех подвижных звеньев mi0, то ускорение центра массS этой системы должно быть равно нулю (аSM=0). Это условие выполняется, когда центр массSсистемы подвижных звеньев механизма не перемещается. Таким образом,статическое уравновешивание есть такое действие, в результате которого центр масс системы подвижных звеньев работающего механизма становиться неподвижным.
На практике наиболее часто статическое уравновешивание проводится тремя способами:
выбором симметричных схем механизмов;
Примером такого механизма является сдвоенный кривошипно-ползунный механизм, используемый для мотоциклетных и других ДВС (рис. 10. 2).

Рис. 10. 2
Механизм выполнен кососимметричным, правая и левая шатунно-поршневые группы 2-3 и 4-5 абсолютно одинаковы, центр масс S1коленчатого вала находиться на оси вращения (Ф1=0).Ф =Ф1 +Ф2 +Ф3 +Ф4 +Ф5 =0, что и свидетельствует о полной статической уравновешенности механизма.
Однако МФ = МФ2 + МФ4 + МА(Ф2) + МА(Ф4) 0, т.е. моментной уравновешенностью механизм не обладает.
установкой корректирующих масс (противовесов) (рис. 10.3);

Рис. 10. 3

размещением противовесов на дополнительных звеньях или кинематических цепях (рис. 10.4);
Рис. 10. 4
Наиболее наглядным и простым методом уравновешивания механизмов является метод замещающих масс.