

Курсовая работа / Структурный и кинематический анализ плоского рычажного механизма (метод. указ. к курс. работе)
.pdfФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ
Забайкальский институт железнодорожного транспорта
В. В. Капшунов,
В. А. Ильиных
СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА
Методические указания к курсовой работе по дисциплине «Теория механизмов и машин» для студентов инженерно-
технических специальностей
http://lib.zab.megalink.ru/viewer.pl?book_id=20575.pdf
Чита
2016
УДК 62-23:621.01
ББК К41
К 20
Рецензент:
профессор кафедры «Научно-инженерные дисциплины» Забайкальского института железнодорожного транспорта, д. т. н., профессор
О. А. Баландин
Капшунов, В. В., Ильиных, В. А.
Структурный и кинематический анализ плоского рычажного механизма: методические указания по выполнению курсовой работы по дисциплине «Теория механизмов и машин» для студентов очной и заочной форм обучения инженернотехнических специальностей. – Чита: ЗабИЖТ, 2016. – 22 с.
Методические указания содержат методику выполнения курсовой работы на тему «Структурный и кинематический анализ плоского рычажного механизма» по дисциплине «Теория механизмов и машин». Указания могут быть также использованы при преподавании дисциплин с тематикой, сходной с тематикой теории механизмов и машин.
© Капшунов В. В., Ильиных В. А. 2016 © Забайкальский институт железнодорожного транспорта (ЗабИЖТ), 2016
2
|
СОДЕРЖАНИЕ |
|
ВВЕДЕНИЕ ......................................................................................................................... |
4 |
|
1. СТРУКТУРНЫЙ АНАЛИЗ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА ......................... |
5 |
|
1.1. Механизм и его элементы. Степень подвижности механизма .......................... |
5 |
|
1.2. Структурная классификация механизмов по Ассуру ......................................... |
7 |
|
1.3. Порядок выполнения структурного анализа ..................................................... |
10 |
|
2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА ............... |
12 |
|
2.1. Основные сведения о кинематическом анализе .............................................. |
12 |
|
2.2. Методика определения скоростей и ускорений................................................ |
14 |
|
2.3. |
Построение плана скоростей ............................................................................. |
16 |
2.4. |
Построение плана ускорений............................................................................. |
18 |
2.5. Порядок выполнения кинематического анализа .............................................. |
20 |
|
СПИСОК ЛИТЕРАТУРЫ .................................................................................................. |
22 |
|
3
ВВЕДЕНИЕ
Целью методических указаний по выполнению курсовой работы является получение практических навыков и закрепление теоретических знаний по вопросам структурного и кинематического анализа плоских рычажных механизмов.
Указания содержат методику расчленения механизма на составные элементы, определения характеристик этих элементов и параметров всего механизма, а также методику построения планов скоростей и ускорений.
4
1. СТРУКТУРНЫЙ АНАЛИЗ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА
1.1. Механизм и его элементы. Степень подвижности механизма
Механизмом называется система, состоящая из звеньев и кинематических пар, образующих замкнутые или разомкнутые цепи, которая предназначена для передачи и преобразования перемещений входных звеньев и приложенных к ним сил в требуемые перемещения и силы на выходных звеньях.
Механизмы образуются последовательным присоединениям звеньев к начальному механизму.
Звено – одна или несколько неподвижно соединенных друг с другом деталей, входящих в механизм и движущихся, как одно целое. Звенья в зависимости от вида их материала могут быть твердые и гибкие (упругие), например, ремень. Жидкости и газы в гидро- и пневмомеханизмах звеньями обычно не считаются.
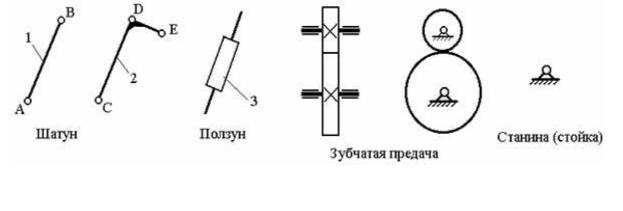
Условное изображение звеньев на кинематических схемах механизмов регламентируется ГОСТ 2.770. Примеры изображения некоторых звеньев приведены на рис. 1.1.
Рис. 1.1. Примеры изображения звеньев и пар на кинематических схемах механизмов
Стойка – звено, которое при исследовании механизма принимается за неподвижное.
Кривошип – вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси.
Коромысло – вращающееся звено рычажного механизма, которое может совершать только неполный оборот вокруг неподвижной оси.
Шатун – звено рычажного механизма, образующее кинематические пары только с подвижными звеньями.
Кулиса – звено рычажного механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару; в зависимости от степени протяженности элемента поступательной пары различают «камень» (звено меньшей протяженности) и «направляющую».
5
Ползун – звено рычажного механизма, образующее поступательную пару со стойкой.
Камень – звено, совершающее поступательное движение относительно подвижной направляющей, называемой кулисой
Таким образом, каждый механизм имеет стойку и подвижные звенья, среди которых выделяют входные, выходные и промежуточные звенья.
Входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. Входное звено соединено с двигателем либо с выходным звеном другого механизма.
Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм. Выходное звено соединено с исполнительным устройством (рабочим органом, указателем прибора), либо с входным звеном другого механизма.
Начальное звено – звено, координата которого принята за обобщенную. При этом начальный механизм образуется как начальное звено, присоединенное к стойке.
Обобщенная координата механизма – каждая из независимых координат, определяющих положение всех звеньев механизма относительно стойки.
Звенья соединяются между собой кинематическими парами, которые представляют собой подвижное соединение двух звеньев, допускающее их определенное относительное движение.
Кинематические пары могут быть классифицированы по типам (вращательная или поступательная), классам, а также по виду места контакта (места связи) поверхностей звеньев (высшие и низшие пары).
Класс пары определяется числом условий связи, накладываемых на относительное движение звеньев, соединяемых этой парой. Например, если телами (звеньями), образовавшими кинематическую пару, утрачено по 5 степеней свободы каждым, эту пару называют кинематической парой 5-го класса. Если утрачено 4 степени свободы – 4-го класса и т.д. Число степеней подвижности обозначается H. Число налагаемых связей обозначается S. При этом число степеней подвижности можно определить по формуле:
H = 6-S. |
(1.1) |
Низшими парами являются пары, в которых контакт звеньев осуществляется по плоскости или поверхности (пары скольжения). Высшими парами – пары, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием).
Кинематическая цепь – система звеньев, образующих между собой кинематические пары.
По признаку наличия разветвлений различают цепи простые (каждое звено цепи входит не более чем в две кинематических пары) и сложные или разветвленные (некоторые звенья входят в три или более пары); в
6
разветвленных цепях могут присутствовать так называемые кратные (двойные, тройные и т. д.) шарниры.
По области движения звеньев цепи бывают плоские (траектории движения точек всех звеньев – плоские кривые, лежащие в параллельных плоскостях) и пространственные.
Плоским механизмом называется механизм, все звенья которого двигаются в одной или в параллельных плоскостях.
Рычажными механизмами называют механизмы, в которые входят жесткие звенья, соединенные между собой вращательными и поступательными кинематическими парами.
На кинематических схемах звенья нумеруются арабскими цифрами, а кинематические пары обозначаются заглавными буквами латинского алфавита (рис. 1.1). Стойку принято выделять штриховкой. Элементы высшей пары очерчивают кривыми, которыми они характеризуются в натуре.
Степень подвижности плоского рычажного механизма определяется по формуле П. Л. Чебышева:
W 3n 2P |
P |
, |
5 |
4 |
где n – число подвижных звеньев механизма; Р5 – число пар пятого класса; Р4 – число пар четвертого класса.
1.2. Структурная классификация механизмов по Ассуру
(1.2)
Согласно классификации, предложенной Ассуром Л. В., механизмы, не имеющие избыточных связей и местных подвижностей, состоят из первичных (начальных) механизмов и структурных групп Ассура.
Структурной группой Ассура (или группой нулевой подвижности) называется кинематическая цепь, образованная только подвижными звеньями механизма, подвижность которой равна нулю.
Конечные звенья групп Ассура, входящие в две кинематические пары, из которых одна имеет свободный элемент звена, называются поводками.
Структурные группы Ассура делятся на классы в зависимости от числа звеньев, образующих группу, числа поводков в группе, числа замкнутых контуров внутри группы. В пределах класса группы подразделяются по числу поводков на порядки (порядок группы равен числу ее поводков). Механизмы классифицируются по степени сложности групп входящих в их состав. Класс и порядок механизма определяется классом и порядком наиболее сложной из входящих в него групп. Класс группы за-
7
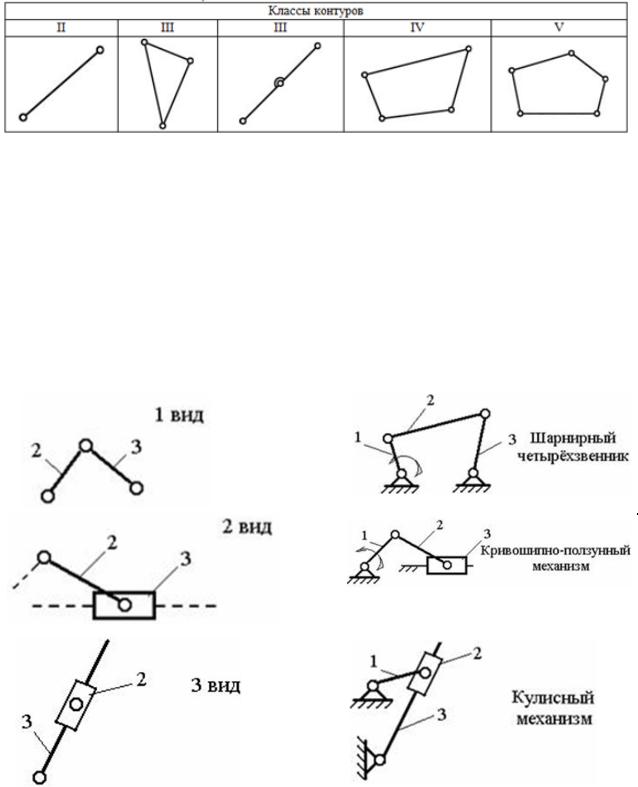
дается наивысшим замкнутым контуром, входящим в ее состав. Класс контура определяется числом внутренних кинематических пар, образующих этот замкнутый контур (рис. 1.2).
Рис. 1.2. Классы контуров групп Ассура
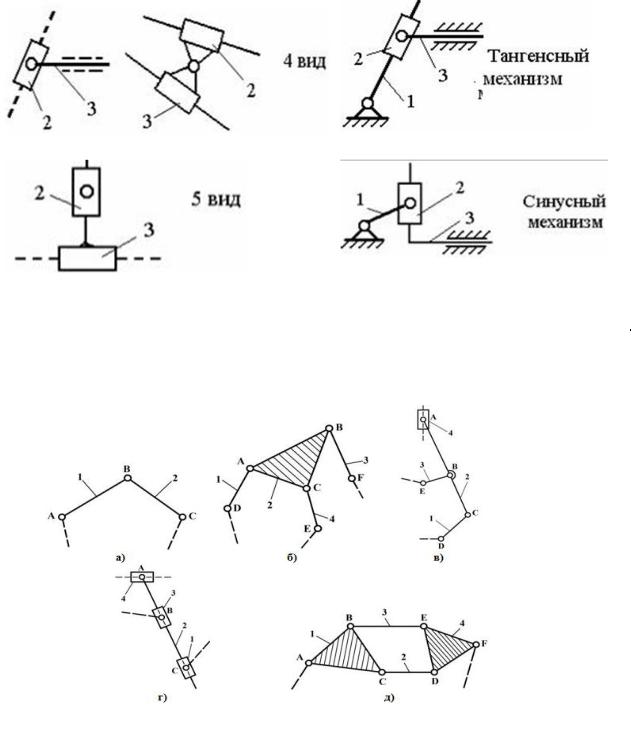
На рис. 1.3 показаны примеры группы Ассура различных классов. Наиболее распространённые структурные группы 2-го класса подраз-
деляются на пять видов (модификаций) (табл. 1.1).
|
Таблица 1.1 |
Виды групп Ассура |
|
|
|
Кинематическая схема структурной группы, |
Механизм, содержащий такую |
вид |
структурную группу |
|
|
|
|
|
|
|
|
8
|
Окончание таблицы 1.1 |
|
|
Кинематическая схема структурной группы, |
Механизм, содержащий такую |
вид |
структурную группу |
|
|
|
|
|
|
Рис. 1.3. Группы Ассура: а) II-го класса; б) в) г) III-го класса; д) IV-го класса
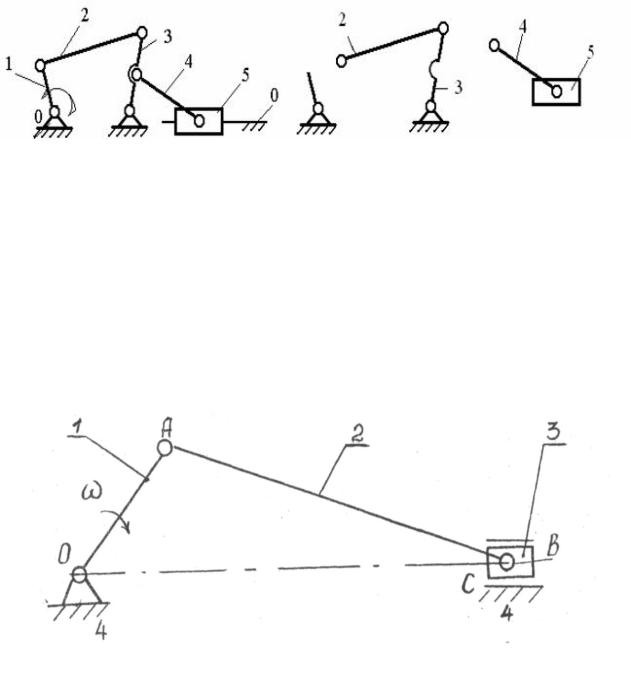
При структурном анализе надо последовательно отсоединять от механизма наиболее удаленные простые структурные группы таким образом, чтобы каждый раз оставалась замкнутая кинематическая цепь с прежним числом степеней свободы (рис. 1.4).
9
а) |
в) |
г) |
|
б)
Рис. 1.4. Расчленение механизма на структурные группы: а – исходный механизм; б – начальный механизм; в – 2-й класс, 1-й вид; г – 2-й класс, 2-й вид
При структурном анализе механизма составляется формула строения механизма. Для механизма, изображенного на рис. 1.5, формула строения механизма (Ф.М.) будет иметь вид:
Ф.М. = I(4,1) → II(2,3)
где I (1,4) – исходный механизм первого класса;
II (2,3) – двухповодковая группа Ассура второго класса второго порядка.
Стрелки указывают порядок присоединения групп.
Рис. 1.5. Механизм: 1 - кривошип; 2 - шатун; 3 - ползун; 4 - стойка
1.3.Порядок выполнения структурного анализа
1)Изобразить в произвольном масштабе кинематическую схему заданного механизма.
2)Нанести обозначения звеньев и кинематических пар на схему; присвоить наименования звеньям и также нанести эти наименования на схему.
3)Составить таблицу звеньев и кинематических пар (табл. 1.2).
10