

Радиоавтоматика.-6
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
230 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
kO |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
W ( p) |
|
|
1 |
|
|
p TO |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
1 |
kOC |
|
kO |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
p T |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
(14.62) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kO |
|
|||
|
|
|
|
|
|
|
|
kO |
|
|
|
|
|
|
1 |
|
|
|
|
kOC kO |
|
|||||
|
|
|
|
|
|
1 k |
|
k |
|
|
p T |
|
|
|
|
|
|
|
|
|
|
TO |
||||
|
|
|
|
|
|
|
OC |
|
O |
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
p 1 |
kOC kO |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W ( p) |
|
|
|
k |
, |
(14.63) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
pT |
|||||||||||||||
где k |
|
kO |
, T |
|
|
TO |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 kOC kO |
1 |
kOC kO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Таким образом, |
|
в |
результате |
охвата |
апериодического звена первого |
||||||||||||||||||||
порядка жесткой обратной связью тип звена не изменяется, а его коэффициент
передачи и постоянная времени изменяются в (1 kOC kO ) раз, то есть уменьшаются в случае отрицательной обратной связи и увеличиваются при положительной обратной связи.
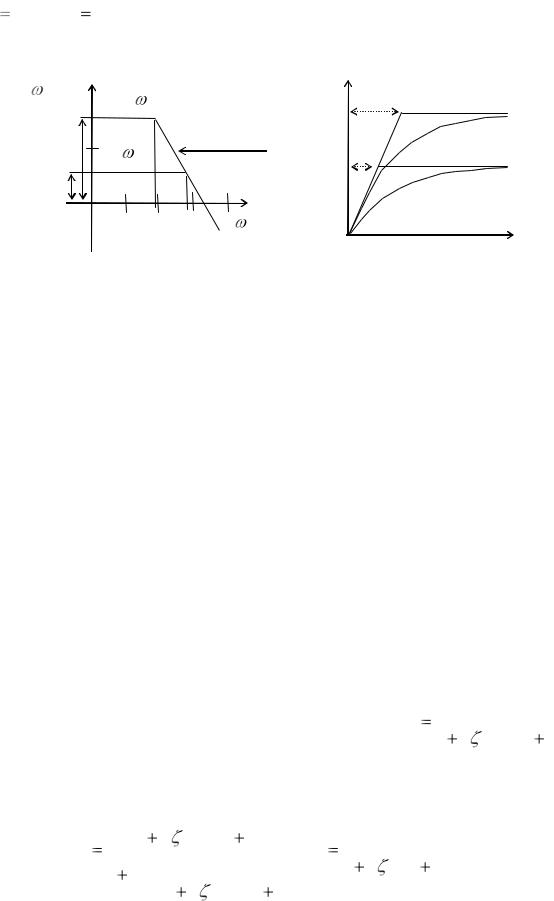
В качестве корректирующей обратной связи применяется в основном отрицательная обратная связь для уменьшения инерционности и улучшения качества переходного процесса. На рис. 14.12 приведены соответственно ЛАЧХ
и переходные характеристики |
|
|
апериодического |
звена |
при отсутствии |
|||||||||||
( LO ( ) , hO (t) ) и при наличии ( L( |
|
) , h(t) ) отрицательной обратной связи. |
||||||||||||||
При охвате жесткой |
обратной |
связью интегрирующего |
звена с |
|||||||||||||
передаточной функцией W ( p) |
|
|
kO |
согласно выражению (14.61) получим |
||||||||||||
|
|
|
|
|
|
|||||||||||
O |
|
|
|
p |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
kO |
|
|
|
|
|
|
|
|
|
|
|
|
|
W ( p) |
|
|
p |
|
|
|
|
|
|
kO |
|
k |
|
, |
(14.64) |
|
|
|
|
|
|
|
kO |
p kOC kO |
pT 1 |
||||||||
1 |
kOC |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
p |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
231
где k |
|
1 |
; T |
1 |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
kOC |
kOC kO |
|
|
|
|
|
|||||
|
L( ), ДБ |
|
|
|
|
|
|
|
|
h(t) |
hO (t) |
||
|
LO ( |
) |
|
|
|
|
TO |
||||||
|
|
|
|
|
|
|
|
kO |
|
||||
|
20 lg kO |
L( |
) |
|
|
|
-20дБ/дек |
T |
h(t) |
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
k |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 lg k |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
TO |
T |
0 |
t |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
б |
|
Рис. 14.12. Характеристики апериодического звена без отрицательной обратной связи
ис отрицательной обратной связью:
а— АЛАЧХ; б — переходная
Таким образом, охват интегрирующего звена жесткой обратной связью превращает его в статическое звено. Согласно (14.64) при положительной обратной связи получается неустойчивая система, поэтому практический интерес в данном случае представляет только отрицательная обратная связью.
Охват интегрирующего звена отрицательной обратной связью применяется для снижения порядка астатизма системы и соответственно для повышения ее устойчивости и качества переходного процесса, если САР имеет излишний порядок астатизма.
При охвате жесткой отрицательной обратной связью апериодического
звена второго порядка с передаточной функцией WO ( p) |
|
kO |
|
|
||||||||||||||
|
|
p 2T 2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 2 |
pT |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O O |
O |
|
согласно выражению (14.61) получим |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
kO |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 2 |
pT |
|
p 2T 2 |
|
|
|
|
k |
|
|
|
||||||
W ( p) |
|
|
|
|
O O |
|
O |
|
|
|
|
|
|
, |
(14.65) |
|||
1 kOC |
|
|
|
|
|
kO |
|
|
|
|
1 2 pT p 2T 2 |
|||||||
|
1 |
2 |
O |
pT |
p |
2T 2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
O |
|
|
O |
|
|
|
|||||
232
где k |
kO |
|
; T |
|
TO |
|
; |
|
O |
|
. |
|
|
|
|
|
|
|
|
||||
|
|
|
|
||||||||
|
1 kOC |
kO |
1 kOC kO |
|
|
|
1 kOC kO |
|
|
||
Таким образом, в результате охвата апериодического звена второго порядка жесткой отрицательной обратной связью тип звена не изменяется, его
коэффициент передачи уменьшается в (1 kOC kO ) |
раз, а постоянная времени и |
||
|
|
|
|
коэффициент демпфирования уменьшаются в 1 |
kOC kO раз. При этом если |
||
коэффициент демпфирования остается больше 0.707, то качество переходного процесса повышается, а если  0.707 , то появляется колебательность переходного процесса.
0.707 , то появляется колебательность переходного процесса.
14.3.3. Гибкая корректирующая обратная связь
Идеальная гибкая обратная связь представляет собой идеальное
дифференцирующее звено. Если это звено дает первую производную
WOC ( p) kOC p , то такая связь называется обратной связью по скорости. Для
основного звена с передаточной функцией |
WO ( p) |
kO |
согласно |
||||||||||
QO ( p) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
выражению (14.61) получим |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
kO |
|
|
|
|
|
|
|
|
|
|
W ( p) |
|
|
QO ( p) |
|
|
|
kO |
|
. |
(14.66) |
|||
|
|
|
kO |
|
|
QO ( p) kOC kO p |
|||||||
1 |
kOC p |
|
|
|
|
|
|
|
|
|
|||
QO ( p) |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Таким образом, гибкая обратная связь, не влияя на коэффициент передачи охватываемого звена, изменяет коэффициент при p в знаменателе его передаточной функции. Такая обратная связь применяется в УКВ-приемниках для перестройки в диапазоне частот, чтобы исключить влияние системы АПЧ.
|
|
|
|
|
233 |
|
В случае апериодического звена первого порядка, когда WO ( p) |
|
kO |
|
, |
||
|
|
|
||||
|
|
|
1 pTO |
|||
получим |
|
|
|
|
|
|
|
kO |
|
|
|
|
|
W ( p) |
|
, |
(14.67) |
|||
1 (TO kOC kO ) p |
||||||
то есть постоянная времени основного звена изменяется на величину |
|
kOC kO , |
||||
пропорциональную коэффициенту обратной связи, причем отрицательная обратная связь увеличивает постоянную времени, а положительная — уменьшает. При этом в отличие от отрицательной жесткой обратной связи применение положительной гибкой обратной связи позволяет повышать быстродействие без снижения коэффициента передачи основного звена.
Для интегрирующего |
звена с |
передаточной функцией |
WO ( p) |
kO |
|
|||||
p |
||||||||||
|
|
|
|
|
|
|
|
|||
согласно выражению (14.61) |
получим |
|
|
|
|
|
|
|
||
W ( p) |
|
kO |
|
k |
, |
(14.68) |
||||
(1 |
kOC kO ) p |
|
p |
|||||||
то есть гибкая обратная связь изменяет коэффициент передачи, но не изменяет тип звена, как это было в случае жесткой обратной связи.
При гибкой обратной связи по ускорению, то есть по второй
производной, когда |
W |
( p) |
k |
OC |
p 2 . |
для |
основного |
звена с |
передаточной |
||||||||||
|
|
OC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
функцией WO ( p) |
|
kO |
согласно выражению (14.61) получим |
|
|||||||||||||||
QO ( p) |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
kO |
|
|
|
|
|
|
|
|
|
|
||
|
W ( p) |
|
|
|
QO ( p) |
|
|
|
kO |
|
|
, |
(14.69) |
||||||
|
1 |
kOC p |
2 |
|
|
kO |
|
Q ( p) k |
|
k |
p 2 |
||||||||
|
|
|
|
|
|
|
|
|
O |
OC |
|
O |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
QO ( p)
то есть изменяется коэффициент передачи при p 2 в знаменателе передаточной функции. Такую обратную связь имеет смысл применять для основных звеньев второго и более высоких порядков. Инерционность гибкой обратной
235
Таким образом, на основе практически безынерционного усилителя можно получить звено с передаточной функцией, обратной передаточной функции звена обратной связи.
Несмотря на эквивалентность всех способов коррекции на передаточную функцию системы в соответствии с выражениями (14.8) - (14.13), обратные связи получили большее распространение благодаря следующим достоинствам:
обратную связь, как правило, легче реализовать из-за того, что на ее вход поступает более мощный сигнал, чем уровень мощности в той точке системы,
куда подключен выход цепи обратной связи;
отрицательные обратные связи уменьшают отрицательное влияние нелинейностей и нестабильности параметров системы, имеющихся в охваченной основной части системы, что также объясняет их основное применение в технике САР.
236
Литература
1. Якушевич Г.Н. Радиоавтоматика / Г.Н. Якушевич; Федер. агентство по образованию, Томск. гос. ун-т систем упр. и радиоэлектроники. – Томск:
Томск. гос. ун-т систем упр. и радиоэлектроники, 2005. – 229 с.
2.Востриков А.С. Теория автоматического регулирования: учеб. пособие для вузов/ А.С.Востриков, Г.А. Французова. – М.: Высш. шк., 2004. – 365 с.
3.Коновалов Б.И. Теория автоматического регулирования: учеб. пособие /
Б.И. Коновалов, Ю.М. Лебедев. – Томск: Томск. гос. ун-т систем упр. и
радиоэлектроники, 2003. – 205 с.
4. |
Ким Д.П. Теория автоматического управления. Т.1. Линейные системы. - |
М.: Физматлит, 2003. – 288с. |
|
5. |
Кориков А.М. Основы теории управления: учебное пособие / |
А.М. Кориков – Томск, - ТУСУР. – 2002. – 392 с. |
|
6. |
Справочное пособие по теории систем автоматического регулирования и |
управления / под общей ред. Е.А. Санковского. Мн.: Вышэйш. школа, 1973. –
584с.
7.Справочник по радиоэлектронным системам. Т.1. Захаров В.Н., Кривицкий Б.Х., Мамаев Н.С. и др.; Под ред. Б.Х. Кривицкого. – М.: Энергия, 1979. – 352с.
8.Справочник по радиоэлектронике в 3 т. / под общей ред. проф. д-ра. техн.
наук А.А.Куликовского. – М.: Энергия, 1970.-816c.
9. Коновалов Г.Ф. Радиоавтоматика / Г.Ф. Коновалов – М.: Радио и связь,
1990. – 335 с.
10. Первачев В.С. Радиоавтоматика / В.С. Первачев. – М.: Радио и связь,
1982. – 296 с.
11. Юревич Е.И. Теория автоматического управления \ Е.И. Юревич – М.:
Энергия, 1975.- 416 с.
12. Попов Е.П. Теория линейных систем автоматического регулирования и управления / Е.П. Попов. – М.: Наука, 1989. – 304 с.
237
13. Уваров Р. В. Радиоприемные устройства: Учебник для техникумов /
Р.В. Уваров, В.И. Хиленко. – М.: Радио и связь, 1989. – 280 с.
14. Справочник по учебному проектированию приемно-усилительных
устройств / М. К. Белкин, В. [и др.]. – 2-е изд. – Выща шк.: Головное изд-во,
1988. |
– 472 с. |
|
|
15. |
Проектирование радиоприемных устройств: учеб. пособие для вузов / под |
||
ред. А.П. Сиверса. – М : Сов. Радио, 1976. – 488 с. |
|
|
|
16. |
Шахгильдян В.В. Системы фазовой автоподстройки |
частоты |
/ |
В.В. Шахгильдян, А.А. Ляховкин. – М.: Связь, 1972. – 450 с. |
|
|
|
17. |
Кривицкий Б.Х. Системы автоматической регулировки |
усиления |
/ |
Б.Х. Кривицкий, Е.Н. Салтыков. – М.: Радио и связь, 1982. – 192 с. |
|
|
|