

Методология системотехнического проектирования электронных и радиоэлектронных средств (в двух частях)
..pdfТаблица 5.2 – Значения определителя det R
|
|
|
Det R |
|
n |
|
|
rij |
|
|
0 |
0,1 |
0,5 |
1,0 |
2 |
1 |
1 |
0,25 |
0 |
4 |
1 |
0,8 |
0,3 |
0 |
8 |
1 |
0,63 |
0,036 |
0 |
12 |
1 |
0,5 |
0,004 |
0 |
Как видно из таблицы, по мере увеличения взаимной ковариации между выходными сигналами компонентов, составляющих систему, величина определителя ковариационной матрицы det R уменьшается от единицы (отсутствие связей между компонентами: rij 0) до нуля в случае максимально возможной связи
компонентов: rij 1. Из таблицы также видно, что det R убывает и по мере увели-
чения числа компонентов в системе даже при сравнительно слабых связях между ними. В первом случае систему часто называют сложной, во втором – большой. Совокупность компонентов будет проявлять себя как система при условии det R << 1, и в этом случае её нельзя рассматривать по отдельным образующим её компонентам независимо от того, чем обеспечивается малая величина определителя det R – большим числом компонентов или сильными связями между ними.
Кроме большой размерности и сложности, отметим ещё ряд характерных особенностей больших и сложных систем: слабую структурированность теоретических и фактических знаний о системе и её компонентах; физическую разнородность подсистем и компонентов, образующих систему; случайность и неопределённость факторов, действующих в системе; многокритериальность оценок качества функционирования системы.
Имитационное компьютерное моделирование является одним из важнейших инструментов изучения системы, помогающим во многом преодолеть трудности, возникающие при проектировании из-за перечисленных выше особенностей больших и сложных систем. Вычислительные эксперименты с математической моделью системы позволяют сделать выводы оповедении системы в различныхситуацияхбез её построения, если это проектируемая система; без вмешательства в её работу, если это действующая система, экспериментирование с которой дорого и небезопасно; без разрушения системы, если цель исследования состоит в нахождении предельных условий её работы. Процесс моделирования системы включает построение модели, организацию вычислительных экспериментов с ней, создание программного обеспечения моделирования.
Процесс построения модели состоит из ряда этапов, из которых можновыделить два: построение формальной аналитической или алгоритмической модели на основе знаний о моделируемой системе и формирование машинной модели по построенной формальной. Второй этап является предметом ответственности специалистов по программированию и здесь рассматриваться не будет. Построение формальной
136
модели системы производится её разработчиком и представляет сложную научную задачу. Впоследнеевремя чащеиспользуются алгоритмическиеформальныемодели больших систем на основе специальных средств автоматизации системотехнического моделирования, в состав которых входят:
–язык описания моделируемых систем;
–средства обработки конструкций языка описания (компилятор, транслятор или интерпретатор);
–управляющая программа моделирования, осуществляющая имитацию моделирования системы во времени;
–набор стандартных программных средств, используемых для организации вычислительных экспериментов с моделью.
Такие специализированные средства моделирования обладают перед моделями, реализованными с помощью универсальных языков программирования, рядом преимуществ: меньшими затратами на программирование, возможностью использования моделей стандартных компонентов, автоматическим формированием данных, соответствующих принятому способу моделирования системы, удобством их накопления и представления.
Вычислительные эксперименты с любой технической системой вообще, и радиотехнической в частности, проводятся для получения информации о её поведении, а эта информация довольно многообразна и характеризует различные стороны функционирования ТС. На основании полученной информации вычисляются показатели эффективности системы, что представляет собой сложную задачу, которая решается на этапе организации вычислительных экспериментов и требует привлечения теории планирования, эксперимента, статистики и других математических методов. В связи с тем что ТС работают в условиях действия случайных факторов, значения многих функционалов, характеризующих эффективность системы, могут оказаться случайными величинами. Поэтому при выборе показателей эффективности обычно пользуются средними значениями соответствующих функционалов, либо вероятностями совершения некоторых случайных событий, либо строятся совокупности функционалов, характеризующие свойства системы интегрально, такие как помехозащищённость, надежность и т.п.
С точки зрения целевого назначения и описательных свойств различные уровни моделирования систем имеют свои характерные особенности. Можно выделить ряд уровней моделирования ТС, каждому из которых соответствуют свои формальные модели системы. Отметим прежде всего следующие:
–модели потенциальной предельной достижимости, которые характеризуют потенциальные возможности моделируемой системы в целом или отдельных её подсистем и компонентов. Они создаются на основе изучения фундаментальных достижений науки в данной области;
–системотехнические или имитационные модели, которые описывают функционирование системы в кибернетических терминах. С помощью этих моделей выполняется имитационное моделирование ТС. Термин «имитационное моделирование» означает, что результат моделирования нельзя вычислить или предсказать
137
заранее и необходим вычислительный эксперимент на модели, чтобы исследовать поведение проектируемой системы;
– функциональные модели, в основу построения которых положены макромодели отдельных компонентов и подсистем. При классификации функциональных моделей радиосистем обычно учитывают способы получения и свойства макромоделей отдельных компонентов, а также способы описания сигналов и помех в системе. Подобные системные модели имеют большую конкретность по сравнению с имитационными и благодаряэтомупозволяют уточнять характеристики отдельных компонентов системы в процессе проектирования, а также изучать их влияние на работу системы в целом. Однако они требуют больших затрат на программирование
иорганизацию вычислительных экспериментов.
5.5Краткий обзор САПР в области системотехники электронных
ирадиоэлектронных средств
5.5.1 Пакеты прикладных программ
компьютерного математического моделирования электронных
ирадиоэлектронных средств
Впроцессе проектирования необходимо не просто создать аппаратуру, которая будет обеспечивать требуемое функционирование, но и оптимизировать её по широкому спектру функциональных, конструкторско-технологических, эксплуатационных и экономических показателей. На отдельных этапах для частных задач оптимизацию можно осуществить на основе разработанных формальных математических методов. Однако применительно к комплексным ЭРЭС задача оптимизации часто не поддается формализации. Встречаясь с такой ситуацией, разработчики обычно рассматривают несколько вариантов решения поставленной задачи, подсказанных, как правило, предшествующим коллективным опытом, интуицией, и выбирают лучший из них. Такой подход называется эвристическим многовариантным анализом. Однако в связи с возрастающей сложностью ЭРЭС, с повышением требований к ним необходимые расчеты оказываются все более трудоёмкими, а количество вариантов, целесообразных для рассмотрения, катастрофически увеличивается. Эта ситуация получила название «тирания альтернатив». Часто на этапе проектирования трудно предвидеть некоторые требования, вытекающие из условий эксплуатации. В результате создание нового ЭРЭС затягивается на долгие годы. Представляемые к испытаниям опытные образцы не удовлетворяют заданным требованиям, а доводка аппаратуры происходит в процессе испытаний, что удорожает проектирование во много раз [10].
Подобное положение не является виной разработчиков. Это результат возникшего принципиального несоответствия традиционного подхода к проектированию и сложности современных ЭРЭС. Указанное противоречие вызвало интенсивное
138
развитие новой технологии проектирования ЭРЭС, базирующейся на системном подходе и совершенствовании процессов проектирования с применением математических методов и средств вычислительной техники, комплексной автоматизации трудоемких и рутинных проектных работ, с заменой макетирования и натурного моделированияматематическим и компьютерным моделированием, использованием эффективных методов многовариантного проектирования и оптимизации, а также с повышением качества управления проектированием.
В процессе проектирования ЭРЭС на системном уровне важную роль играют пакеты прикладных программ компьютерного математического моделирования, схемо- и системотехнического проектирования.
Среди систем компьютерной математики наиболее популярными являются интерактивные среды универсального типа: Mathcad, MatLAB, Maple, Mathematica и др. Каждая из них имеет свои достоинства и недостатки, связанные со спецификой построения и наиболее эффективной областью применения [11].
MatLAB. Система MatLAB занимает лидирующее положение среди математических и инженерных пакетов. Она в основном ориентирована на компьютерное моделирование сложных систем, решение задач многомерной обработки данных, исследование процессов имитационного моделирования и цифровой фильтрации. Моделирование динамических систем в MatLAB осуществляется с помощью встроенного пакета программ Simulink. Система также имеет большое число инструментов и пакетов расширений (Toolboxes) для проектирования специфических объектов и проведения различных исследований, в том числе решения задач идентификации систем (System Identification, Frequency Domain Identifications),
разработки систем управления (Control Systems), моделирования и проектирования систем связи (Communications), событийного моделирования систем (Stateflow), моделирования в реальном времени (Real-Time Workshop) и пр.
При моделировании с использованием Simulink реализуется принцип так называемого визуального программирования, в соответствии с которым пользователь на экране монитора из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от прежних классических способов моделирования, не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний, требующихся при работе на компьютере, и, естественно, знаний в данной предметной области.
Maple и Mathematica. Системы Maple и Mathematica создавались как инструменты, позволяющие выполнять сложные символьные аналитические преобразования. Поэтому они в первую очередь предназначены для научных работников и математиков, профессионально работающих в этой области.
Mathcad. Система Mathcad получила наибольший спрос среди «массовых» потребителей. Она в максимальной степени доступна широкому кругу пользователей, так как обладает уникальным интерфейсом, исключающим необходимость изучения для работы в этой среде какого-либо алгоритмического языка высокого уровня. Mathcad использует общепринятую символику математических выражений и нотаций. В сочетании с развитым программным обеспечением, обширной
139
библиотекой встроенных функций, наличием удобного редактора текста и формул, а также с большим количеством продуманных и выверенных учебно-практических пособий Mathcad стал наиболее популярной средой для выполнения расчетнографических работ, особенно в вузовском техническом образовании. С помощью Mathcad можно решать самые разные математические задачи, выполнять сложные исследования и оформлять их результаты на высоком профессиональном уровне.
5.5.2Пакеты прикладных программ компьютерного схемо-
исистемотехнического моделирования ЭРЭС
Среди схемо- и системотехнических САПР необходимо отметить следующие пакеты прикладных программ: LabVIEW, SysCalc, Hypersignal RIDE, Vis Sim, Visual System Simulator, System Vue, MicroCAP.
Если программы компьютерного математического моделирования можно применять для математического описания объекта проектирования на разных уровнях – от системного уровня до уровня элементной базы, то программы схемо- и системотехнического проектирования применяются на уровне систем, подсистем и функциональныхузлов, а такжедля моделированияканалов распространениясигналов на физическом уровне.
Рассмотрим основные САПР.
Simulink. Simulink является достаточно самостоятельным инструментом MatLAB и при работе с ним совсем не требуется знать сам пакет MatLAB и остальные егоприложения. С другой стороны, доступ к функциям MatLAB и другим его инструментам остается открытым, их можно использовать в Simulink. Имеются также дополнительные библиотеки блоков для разных областей применения (например, Power System Blockset – моделированиеэлектротехническихустройств, Digital Signal Processing Blockset – набор блоков для разработки цифровых устройств и т.д.).
При работе с Simulink пользователь имеет возможность модернизировать библиотечные блоки, создавать свои собственные, составлять целые библиотеки новых блоков.
При моделировании можно выбирать стратегию и технику моделирования, например численный метод решения дифференциальных уравнений, способ изменения модельного времени (с фиксированным или переменным шагом) и т.д. В ходе моделирования имеется возможность следить за процессами, происходящими
всистеме. Для этого используются специальные устройства наблюдения, входящие
всостав библиотеки Simulink. Результаты моделирования могут быть наглядно представлены в виде графиков или таблиц.
Преимущество Simulink заключается также в том, что он позволяет пользователю самостоятельно пополнять библиотеки блоков с помощью подпрограмм, написанных как на языке MatLAB, так и на классических языках алгоритмического программирования (С ++, Fortran).
140

На рисунке 5.19 показан пример моделирования ветрогенератора в пакете
Simulink.
Рисунок 5.19 – Пример моделирования в Simulink
LabVIEW. Система LabVIEW – это программный продукт фирмы National Instruments (США), предназначенный для создания моделей виртуальных приборов и контрольно-измерительных систем на базе алгоритмического языка графического программирования (http://www.labview.ru/LabVIEW). Система LabVIEW исполь-
зуется для проектирования и исследования систем сбора и обработки данных, удаленного управления ходом эксперимента, управления роботами и системами машинного зрения, генерации и цифровой обработки сигналов, проектирования систем управления техническими объектами и технологическими процессами и пр. По принципам построения эта система аналогична SCADA-системам.
LabVIEW – это среда прикладного графического программирования, которая используется разработчиками, инженерами, преподавателями и учеными по всему миру для быстрого создания комплексных приложений в задачах измерения, тестирования, управления, автоматизации научного эксперимента, а такжев области образования.
В основе LabVIEW лежит концепция графического программирования (графический язык G), заключающаяся в описании системы в виде графической блокдиаграммы, состоящей из функциональных блоков и связей между ними [5]. Несмотря на графический ввод, в языке G используются те же конструкции
141
иметоды, что и в классических языках программирования: типы данных, циклы, переменные, рекурсия, обработка событий и объектно-ориентированное программирование.
LabVIEW является идеальным программным средством для создания информа- ционно-измерительных систем, а также систем автоматизации управления на основе технологии виртуальных приборов. LabVIEW позволяет взаимодействовать с реальными аппаратными средствами, такими как встраиваемые в компьютер много- канальныеизмерительныеаналого-цифровыеплаты, платы захватаи синхронизации видеоизображения для систем машинного зрения, платы управления движением и исполнительныемеханизмы, измерительныеприборы, подключаемыек компьютеру через стандартныеинтерфейсы RS-232, RS-485, USB, GPIB (КОП), PXI, VXI. Всеэто в комплексе позволяет разрабатывать системы измерения, контроля, диагностики
иуправления практически любой сложности.
Кроме того, LabVIEW может интегрировать в себя программы, написанные в среде MatLAB и на языке C. Большое количество встроенных алгоритмов цифровой обработки одномерных и двумерных сигналов позволяет осуществлять весьма сложную обработку сигнала, изображения и экспериментальных данных во временной, в пространственной и спектральной областях. Программная среда LabVIEW постоянно расширяется новыми средствами обработки сигналов на основе вейвлетанализа, алгоритмов нечеткой логики, сетевых технологий и т. д.
Эффективность использования среды LabVIEW в научных исследованиях состоит в том, что, оставаясь в ее рамках, можно разрабатывать математическую модель объекта и снабжать эту модель экспериментальными данными с помощью аппаратных средств ввода-вывода, сопряженных с реальным объектом.
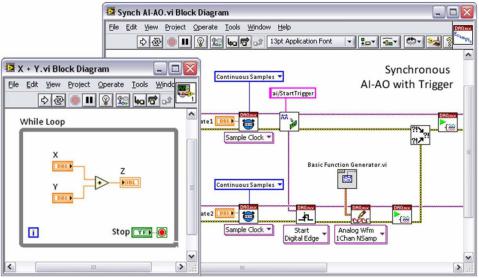
На рисунке 5.20 приведен пример графического моделирования в пакете
LabVIEW.
Рисунок 5.20 – Интерфейс программы LabVIEW
142

SysCalc. SysCalc – это программный пакет от компании Arden Technologies Inc. для расчета на системно-техническом уровне различных характеристик: шумовых, коэффициента усиления, интермодуляционных характеристик и суммарного коэффициента усиления последовательности каскадно включенных компонентов, где каждый компонент описывается своими параметрами
(http://www.ardentech.com/).
Программа SysCalc позволяет на этапе эскизного проектирования осмысленно подбирать такие параметры системы и отдельных блоков, как динамический диапазон, чувствительность, уровнипобочныхгармоник, инаходитьихоптимальное покаскадное распределение [8]. Используя данную программу, можно оценить, какие узлы в тракте вносят ухудшение в результирующие характеристики всего тракта, а также исчерпывающе документировать разрабатываемые проекты. SysCalc использует иерархические закладки, чтобы объединить компоненты в связанные страницы автономной системы.
Страницы затем объединяются, формируя законченную систему. Каждая системная страница может быть отдельно настроена, чтобы отображать только важную для пользователя информацию и поля данных. Число компонентов, которые могут быть помещены в страницу, или число страниц, которые могут быть созданы в проекте, произвольно. Можно присоединять один или большее количество отчетов (таблиц и графиков) к каждой системной странице.
Система отчетов программы SysCalc позволяет производить моделирование фазового шума, анализ линейности и ее диапазона, оценку энергетического потенциала канала связи, анализ побочного электромагнитного излучения и т.п. (рисунок 5.21).
Рисунок 5.21 – Интерфейс программы SysCalc
143
Hypersignal RIDE (Hypersignal Block Diagram). В 1990 г. фирма Hyperception
выпустила систему автоматизированного проектирования Hypersignal Block Diagram для визуального проектирования и моделирования на ПК сложных динамических систем с использованием вычислительных возможностей ПК
(http://www.ni.com/support/ride.htm). В 2003 году компания National Instruments
объявила оприобретении Hyperception. Логическим развитием пакета BlockDiagram стала САПР Hypersignal RIDE, которая поддерживает аппаратные средства цифровой обработки сигналов (ЦОС), установленные в ПК или связанные с ним по последовательному интерфейсу, и позволяет комбинировать в одном проекте как функции, выполняющиеся в среде процессора ПК, так и функции, выполняющиеся
всреде процессора ЦОС.
Всостав Hypersignal входит несколько сотен тематически сгруппированных функций-блоков [8]. Среди них блоки генераторов сигналов, блоки арифметических функций, блоки матричных и векторных операций, блоки функций ЦОС, блоки файловых операций, блоки визуализации сигналов и так далее. В состав САПР Hypersignal также входят блоки управления клавиатурой, переключателями, линейными и стрелочными индикаторами и так далее. Наличие этих функциональных блоков позволяет создавать пользовательский интерфейс разрабатываемой системы совместнос разработкой алгоритма функционирования. В дополнениепоставляются специализированные библиотеки функций для обработки речи (Advanced Speech Library), библиотеки коммуникационных функций (Advanced Transmission Library)
и библиотеки функций для обработки изображений (Image Processing Library). Пользователям САПР Block Diagram и RIDE дополнительно предлагается
генератор ANSI Си-кода. Генератор Си-кода генерирует ANSI Cи-код, соответствующий визуализованному алгоритму, разработанному с помощью Hypersignal RIDE или Hypersignal Block Diagram. В дальнейшем этот код может быть встроен в различные программные продукты для ПК, перенесен на альтернативные UNIXплатформы или встроен с применением соответствующих средств кросс компиляции
вавтономные системы реального времени, созданные на базе различных процессоров.
На рисунке 5.22 приведен пример моделирования системы амплитудной модуляции/демодуляции в пакете Hypersignal.
Vis Sim. Программа Vis Sim от компании Visual Solutions (http://www.vissim. com/) предназначена для построения, исследования и оптимизации виртуальных моделей физических и технических объектов, в том числесистем управления [8]. Vis Sim – это сокращение выражения Visual Simulator – визуальная, т.е. непосредственно воспринимаемая зрением, программная среда и средство моделирования.
Программный пакет предоставляет развитой графический интерфейс, используя который исследователь создает модель из виртуальных элементов (с некоторой степенью условности и идеализации компонентов) так же, как если бы он строил реальную систему из настоящих элементов (рисунок 5.23). Это позволяет создавать, а затем исследовать и оптимизировать модели систем широкого диапазона назначения и различного уровня сложности.
144

При использовании Vis Sim не требуется владеть программированием на языках высокого уровня или на ассемблере. В то же время специалисты, владеющие программированием, могут создавать собственные блоки, дополняя ими богатую библиотеку стандартных блоков Vis Sim.
Рисунок 5.22 – Интерфейс программы Hypersignal
Рисунок 5.23 – Интерфейс программы Vis Sim
145