


34
uС. Д , зависящее от угла отклонения Da . Эта зависимость показана на рисунке
6.8, б. Она определяется изменением глубины модуляции импульсной последовательности.
Рисунок 6.8.
Знак напряжения uС. Д при положительных и отрицательных значениях
угла Da различен, что объясняется изменением фазы огибающей на1800 при смене знака отклонения угла. Можно показать, что наибольшая крутизна пеленгационной характеристики обеспечивается при условииg @ q , где q - ширина диаграммы направленности.
При многоканальной реализации амплитудных пеленгаторов для формирования пеленгационной характеристики вырабатывают разностное напряжение путем вычитания выходных сигналов приемников. Принцип формирования ПХ остается таким же, как и в случае, показанном на рисунке 6.8, б. Чтобы исключить влияние амплитуды сигнала на точность пеленгации, применяют различные методы нормировки : сигналаорганизуют формирование суммарного напряжения каналов, по которому осуществляется регулировка усиления каналов; используют логарифмические амплитудные характеристики усилителей каналов.
Фазовый метод пеленгации в системах с направленными антеннами реализуется на основе разнесенного приема, который был выше описан(см. рисунок 6.1).
6.2.Многоканальные (моноимпульсные) системы
В импульсных многоканальных РЛС каждый отраженный |
импульс |
|
||||||
несет информацию о положении цели |
по |
угловым |
координатам и |
по |
||||
дальности. |
Выделение |
информации |
об |
угловом |
положении |
цел |
||
осуществляется путем сравнения амплитуд и фаз отраженных сигналов, |
|
|||||||
принимаемых несколькими антеннами одновременно. По этой причине РЛС и |
|
|||||||
измерители подобного типа называют моноимпульсными. В зависимости от |
|
|||||||
способа обработки сигналов моноимпульсные измерители угловых координат |
|
|||||||
разделяют на амплитудные и фазовые. |
|
|
|
|
|
|||
Амплитудная разностная система основана на формировании РСН с |
|
|||||||
помощью |
перекрывающихся |
диаграмм |
|
направленности. Для |
случая |
|
||

35
пеленгации в одной плоскости достаточно двух каналов приема. Диаграммы направленности каналов смещены относительно друг друга, как показано на рисунке 6.6. В сантиметровом диапазоне волн смещение обеспечивается за счет расфокусировки облучателей антенны. Структурная схема следящего пеленгатора амплитудно-разностного типа приведена на рисунке 6.9.
Рисунок 6.9. |
|
|
|
|
|
Включенные |
после |
смесителей |
логарифмические |
усилите |
|
промежуточной частоты (ЛУПЧ), детекторы огибающей и вычитающее |
|||||
устройство обеспечивают формирование напряженияuВ , которое является |
|
||||
функцией угла рассогласования Da : |
|
|
|
||
uВ = kВ (log (U0GA (Da +g 2))- log(U0GA (Da - |
|
|
|
||
-g 2))) = kВ log (GA (Da +g 2) |
GA (Da -g 2)), |
|
(6.4) |
|
|
где kВ - коэффициент передачи вычитающего устройства; GA (Da ) - функция |
|
||||
направленности антенны. Выражение (6.4) представляет ПХ |
системы. При |
|
|||
Da = 0 ПХ обращается в нуль за счет того, что GA (g |
2) = GA (-g |
2). Как видно |
|
||
из выражения (6.4), крутизна ПХ не зависит от уровня принимаемого сигнала |
|
||||
U0 , если каналы идентичны. Управление положением равносигнального |
|
||||
направления в пространстве |
осуществляется следящим силовым приводом |
||||
(СПр), который обеспечивает требуемый поворот антенной системы. Чтобы следить за угловыми координатами цели в двух плоскостях, необходимо дополнить систему двумя или одним каналом.
При несоблюдении идентичности каналов обработки неравенство коэффициентов передачи приводит к смещению нуля ПХ(см. выражение (6.4)), что влечет появление ошибок слежения. Указанный недостаток устраняется в амплитудной суммарно-разностной системе, структурная схема которой приведена на рисунке6.10. В этой системе исключается
влияние амплитуды и фазы сигнала на стабильность равносигнального направления и ПХ. Чтобы устранить влияние неравенства и нестабильности коэффициентов усиления каналов, сравнение амплитуд и формирование суммы и разности сигналов производятся непосредственно в -антенно фидерном тракте. Формирование суммы и разности сигналов осуществляется

36
с помощью мостовых схем. Применительно к СВЧ диапазону кольцевой волноводный мост условно показан на рисунке 6.10.
Облучатели, смещенные относительно фокуса отражателя антенны,
обеспечивают |
формирование |
РСН. Точки a1 и |
a2 волноводного моста, |
|||
расположенные |
на расстоянииl0 2 |
друг |
от |
друга, подсоединены |
к |
|
облучателям. Точка c , расположенная |
посредине |
между точкамиa1 и |
a2 , |
|||
является отводом суммарного |
сигнала, |
снимаемого |
с облучателей. В эту же |
|||
точку через антенный переключатель подводится излучаемый сигнал от передатчика, не показанного на рисунке.
Рисунок 6.10.
Напряжение uS суммарного сигнала подается в первый канал, на смеситель СМ1. Зависимость суммарного напряжения от величины угла
рассогласования |
Da определяется |
суммарной |
диаграммой |
направленности |
||
GS , показанной на рисунке 6.11.Точка p |
кольцевого моста отстоит от точки |
|||||
a1 на l0 2 дальше, чем от точки a2 , |
и сигналы от точек a1 и a2 приходят в p |
|||||
со сдвигом на1800 . Образующееся |
разностное |
напряжение uD |
подается |
во |
||
второй канал, на |
смеситель СМ2. |
Это |
напряжение зависит |
от углаDa |
в |
|
соответствии с разностной диаграммой направленностиGD (рисунок 6.11). После усиления суммарное и разностное колебания промежуточной частоты подаются на синхронный детектор(СД). Его опорным сигналом является сигнал суммарного канала. Этот же сигнал после детектирования в ДО может использоваться для индикации цели. Быстродействующая автоматическая
регулировка |
|
|
усиления (БАРУ), работающая |
по |
суммарному |
сигналу, |
||||
обеспечивает |
|
исключение влияния амплитуды |
сигнала на крутизну. ПХ |
|||||||
Таким |
образом, напряжение, вырабатываемое |
синхронным детектором, |
||||||||
определяется отношением разностной и суммарной ДН: |
|
|
||||||||
u |
@ |
uD |
@ |
GA (Da + g 2) -GA (Da -g 2) |
. |
|
|
|
||
|
|
|
|
|
||||||
С. Д |
|
uS |
|
|
GA (Da +g 2)+ GA (Da -g 2) |
|
|
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Неидентичность амплитудных характеристик каналов не влияет на положение РСН; ошибки, обусловленные флуктуациями амплитуды сигнала, в данной системе исключаются. Фазовые нестабильности также не влияют на

37
точность пеленгации, поскольку в системе используется сравнение амплитуд сигналов.
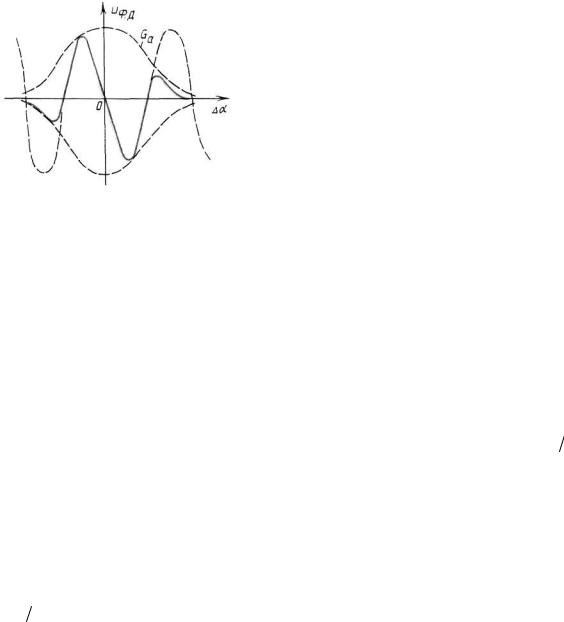
Принцип действия фазоразностной и фазовой суммарно-разностной систем основан на разнесенном приеме сигналов. Принцип разнесенного приема рассматривался выше (рисунок 6.1). В фазоразностной системе для управления положением антенн используется напряжение, снимаемое с выхода фазового дискриминатора (ФД). Входными для ФД являются сигналы каналов антенн A1 и A2 . В некоторых системах автосопровождения напряжение uФ. Д служит для сдвига по фазе колебания гетеродина(Г) с
помощью управляемого фазовращателя (УФВ) (рисунок 6.12).
Рисунок 6.11. |
Рисунок 6.12. |
Этот же фазовращатель обеспечивает постоянный сдвиг фаз p 2 между сигналами каждого канала для формирования нечетной пеленгационной характеристики. Напряжение, вырабатываемое на выходе фазового дискриминатора, по аналогии с формулой (6.2) определяется выражением
2 между сигналами каждого канала для формирования нечетной пеленгационной характеристики. Напряжение, вырабатываемое на выходе фазового дискриминатора, по аналогии с формулой (6.2) определяется выражением
u |
= k |
G |
Da G |
Da |
sin æ |
2pd |
sin |
( |
Da |
ö , |
|
|
|
|
|
|
|
|
|
||||||||||
Ф. Д |
|
П a1 ( |
) a2 |
( |
)ç |
l0 |
|
÷) |
|
|
|
|
||
|
|
|
|
|
è |
|
|
ø |
|
|
|
|
||
где Ga1 и Ga2 - диаграммы направленности первой и второй антенн; kП - |
|
|||||||||||||
коэффициент, учитывающий усиление каналов и характеристику передачи |
|
|||||||||||||
ФД. Если в системе с ненаправленными антеннами ПХ имела периодический |
|
|||||||||||||
характер, приводящий к Неоднозначности отсчета угла, в рассматриваемой |
|
|||||||||||||
системе |
за |
счет |
направленных |
свойств |
антенн |
многозначность |
П |
|||||||
практически исключается. На |
рисунке 6.13 |
показано |
формирование ПХ в |
|
||||||||||
фазовой |
системе |
с |
направленными |
антеннами. Ограничители (Огр), |
|
|||||||||
включенные в каналы УПЧ, приводят к нормировке ПХ. Крутизна ПХ |
|
|||||||||||||
определяется относительной базой: |
|
|
|
|
|
|
|
|||||||
SП . Х = kП ×2pd l0 . |
|
|
|
|
|
|
|
|
|
|
|
|||
38
Рисунок 6.13.
При большой относительной базе ( d l0 >>1) число ложных нулевых направлений в пределах ширины диаграммы направленности возрастает, в результате возникают аномальные ошибки пеленгации. Дня их устранения прибегают к многобазовым системам, имеющим ПХ с малой и большой крутизной.
l0 >>1) число ложных нулевых направлений в пределах ширины диаграммы направленности возрастает, в результате возникают аномальные ошибки пеленгации. Дня их устранения прибегают к многобазовым системам, имеющим ПХ с малой и большой крутизной.
|
Фазовая |
|
|
|
суммарно-разностная система |
строится |
по |
|
, схеме |
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
приведенной |
на |
рисунке6.14. Принцип ее работы во многом схож с |
|||||||||||||||||||||||
принципом действия амплитудной суммарно-разностной системы. Отличие |
|||||||||||||||||||||||||
заключается в том, что информация об угловом положении цели извлекается |
|||||||||||||||||||||||||
из фазы сигналов. В разностный канал включается фазовращатель наp 2 . |
|||||||||||||||||||||||||
При одинаковых |
характеристиках |
|
направленности антенн( G |
= G |
= G |
A |
) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
a2 |
|
|
|
напряжения на входах суммарного и разностного каналов имеют следующий |
|||||||||||||||||||||||||
вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uS = kGa (Da )(cos (w0t )+ cos (w0t - Dj )); |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
uD = kGa (Da )(cos (w0t )- cos (w0t - Dj )), |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
где |
|
|
сдвиг |
фазDj |
|
|
определяется |
углом |
рассогласованияDa : |
|||||||||||||||
Dj = (2p d l0 )´sin (Da ); |
k |
|
- |
коэффициент |
передачи |
суммарно-разностного |
|||||||||||||||||||
устройства. После преобразования сигналов на выходе ФД вырабатывается |
|||||||||||||||||||||||||
напряжение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
u |
= k |
G |
2 |
|
Da |
cos |
j |
|
-j |
|
sin |
æ |
2p d |
sin |
|
Da |
ö |
|
|
(6.5) |
|
|
||
|
|
( |
2( |
|
|
( |
÷) |
|
|
|
|
||||||||||||||
|
Ф. Д |
|
|
П a |
|
) |
|
1 ) |
|
ç |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è l0 |
|
|
ø |
|
|
|
|
|
|
||
где j1 , j2 |
|
- |
сдвиги |
|
фаз |
|
в |
|
каналах. Для |
идентичных каналовj1 = j2 . |
|||||||||||||||
Коэффициент |
|
kП |
определяется усилением каналов и характеристикой |
||||||||||||||||||||||
передачи |
|
ФД. |
Из |
выражения (6.5) видно, |
что в |
системе |
имеет |
место |
|||||||||||||||||
неоднозначность ПХ, которая может быть устранена описанными выше способами. Напряжение uФ. Д в приведённой на рисунке 6.14 схеме, управляет
через силовой привод(СПр) положением антенной системы, обеспечивая сведения угла Da к нулю. Возможен вариант реализации системы с электронным управлением (управляемым фазовращателем), как показано на рисунке 6.12.