


102
мощность сигнала увеличивается с ростом числаLKB уровней квантования, поскольку растет число кодовых импульсов на один отсчет и вместе с этим падает энергия элемента сигнала за счет уменьшения длительности импульса. Однако уменьшение энергии сигнала происходит значительно медленнее, чем уменьшение шума квантования. Так, при переходе от 128 к 256 уровням шум квантования падает на 6 дБ (см. таблицу 11.1), а длительность импульса при переходе от 7 к 8 разрядам уменьшается в 8 7 @ 1,14 раза, т.е. несущественно. Для обеспечения в данном случае той же вероятности ошибкиPe требуется увеличить мощность сигнала в 1,14 раза, т.е. всего на 0,6 дБ.
7 @ 1,14 раза, т.е. несущественно. Для обеспечения в данном случае той же вероятности ошибкиPe требуется увеличить мощность сигнала в 1,14 раза, т.е. всего на 0,6 дБ.
Как и в помехоустойчивых аналоговых системах модуляции, в системах с ИКМ можно производить обмен полосы частот сигнала на мощность.
Действительно, |
спектр |
ИКМ |
сигнала |
имеет , ширинузначительно |
||
превышающую |
ширину |
спектра |
сообщения. За счет этого |
достигается |
||
высокая |
помехоустойчивость |
ИКМ |
.системМинимальная |
частота |
||
дискретизации в соответствии с теоремой Котельникова равна удвоенной ширине спектра сообщения (FB ) . После квантования каждый отсчет может
принимать LKB = 2lmax (Dl +1) |
возможных |
значений |
и заменяться |
кодовой |
|
комбинацией из n = log LKB |
двоичных |
импульсов. Длительность каждого |
|||
символа не может быть больше, чем tИ =1 (2FB log LKB ) , поэтому необходимая |
|||||
полоса частот DfЭ ³ 1 (2tИ ) = FB log LKB . Для системы |
ИКМ - AM сигнал |
будет |
|||
занимать полосу DfЭ = 2Df = 2FB log LKB , т.е. |
полоса |
DfЭ |
растёт с увеличением |
||
уровней квантования по логарифмическому закону. При этом, согласно формуле (11.21), растет верность передачи сообщений.
Таким образом, обмен полосы частот на мощность в ИКМ системах осуществляется более эффективно, чем в системах с аналоговой ЧМ или ФМ. Отношение мощности сообщения к мощности шума на выходе в этих системах растет пропорционально квадрату ширины спектра сигнала.
В системе с ИКМ это отношение растет быстрее, поскольку ширина спектра пропорциональна числу и символов, а мощность шума квантования
обратно пропорциональна 22n . В спутниковых |
радиолиниях, где требуется |
обеспечить высокую верность передачи |
при минимальной мощности |
передатчика, применяют системы с ИКМ. |
|
11.3.2Системы, использующие кодирование с предсказанием
При передаче речевых и телевизионных сообщений между отсчетами имеются корреляционные связи, которые обусловлены неравномерностью спектра и выбором отсчетов через интервалDt , несколько меньший, чем это требуется по теореме Котельникова. Используя корреляционные связи между отсчетами, можно повысить эффективность систем передачи информации.
103
Один из способов повышения эффективности основан на передаче с предсказанием.
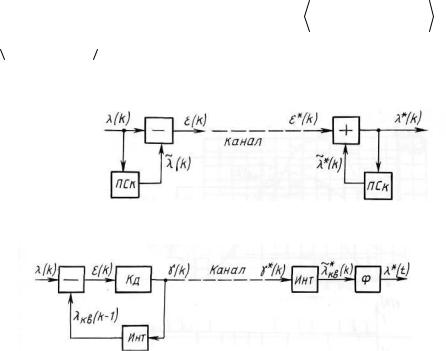
Структурная схема, поясняющая принцип построения систем с предсказанием, приведена на рисунке11.6. На передающей стороне формируется сигнал ошибки предсказания e (k ) путем вычитания из каждого отсчетаl (k )
сигнала |
предсказания l%(k ) , |
вырабатываемого |
из |
предыдущих |
коррелированных отсчетов в предсказателе(ПСк). В |
сигнале |
ошибки e (k ) |
||
содержатся новые сведения, представляющие разность между истинным и предсказанным значениями. На приемной стороне формируется отсчет l* (k )
путем суммирования принятого значения ошибки предсказанияe* (k ) с
предсказанным значением l%* (k ) . При отсчетах с большей корреляцией сигнал предсказания формируется точнее и для передачи сигнала ошибки требуется
меньше |
энергии, чем |
для передачи исходного сигнала. Действительно, |
||||
средняя |
энергия |
сигнала |
ошибки |
при |
марковском |
сообщенииl (t ) |
определяется |
выражением Ee = (l (k )- l k(-1))2 = 2El (1- r ), |
где |
||||
r =  l (k )l (k -1)
l (k )l (k -1) - коэффициент корреляции между отсчетами.
- коэффициент корреляции между отсчетами.
Рисунок 11.6.
Рисунок 11.7.
При p > 0,5 энергия сигнала ошибки Ee меньше энергии исходного сигнала El .
В цифровых системах отсчеты сигнала ошибкиe (k ) передаются с
предварительным квантованием и кодированием. Такие системы называют
системами с дифференциальной ИКМ(ДИКМ). Шум квантования в системах с ДИКМ меньше, чем в обычной системе с ИКМ, поскольку его мощность составляет долю мощности ошибки предсказания. Что касается шума ложных импульсов, то он ухудшает верность передачи при ДИКМ
104
больше, чем при ИКМ, поскольку ошибочный прием кодовой комбинации ведет к ошибочному приему нескольких коррелированных отсчетов сообщения.
Другим способом реализации систем с предсказанием является дельтамодуляция (ДМд), при которой число уровней квантования сигнала ошибки снижено до двух. Это становится возможным при большой частоте дискретизации и росте корреляции между отсчетами. Квантованный сигнал ошибки можно представить в виде
eKB.C (k ) = g (k ) Dl
где
ì+1 при e (k ) ³ 0; g (k )= ïí
ïî-1 при e (k )< 0.
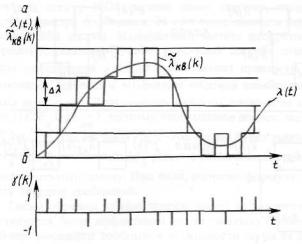
Сигнал на выходе дельта-модулятора несет информацию только о знаке сигнала ошибки. На приемной стороне включается интегратор (Инт), который прибавляет или вычитает Dl , за счет чего уменьшается погрешность между исходными и восстановленными значениями отсчетов. Схема, поясняющая принцип системы с ДМд, приведена на рисунке 11.7. Кодер (квантователь) (Кд) формирует знакопеременные импульсы g (k ) в соответствии с правилом
g (k ) = sin n{l (k ) - lKB (k -1)},
Рисунок 11.8.
где
ì1, если x ³ 0; sin n{x }= í
î-1, если x < 0.
Сигнал lKB (k -1) определяется в результате суммирования всех предыдущих квантованных сигналов ошибки:
k -1 |
k -1 |
lKB (k -1) = åÎKB.C (i )= Dlåg (i ).
i =0 |
i=0 |
105
Символы g (k ) передаются по каналу связи. Одновременно импульсы Dlg (k ) поступают на интегратор (сумматор), где формируется квантованный отсчет lKB (k ) , который сравнивается с последующим отсчетом сообщения.
Вид квантованного сигнала l%KB (t ) на выходе интегратора показан на рисунке 11.8, а, символы g (k ) - на рисунке 11.8, б. При ДМд соседние значения ступенчатой функции l%KB (k ) различаются обязательно на величину одного
шага квантования Dl . Интегратор на приемной стороне выполняет ту же операцию, что и интегратор на передающей стороне, формируя по принятым
знакопеременным импульсам g * (k ) |
ступенчатую |
функциюl%KB* (k ) . |
Эта |
|
функция после сглаживания в фильтре преобразуется в сообщение l* (t ) . |
|
|||
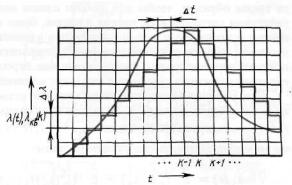
Чем меньше шаг квантованияDl , тем меньше шум квантования, |
||||
определяемый разностью lKB (t ) - l (t ) . Однако при слишком малом шагеDl |
||||
возникают искажения, называемые |
перегрузкой по |
наклону. При |
этом |
|
ступенчатая функция не успевает следить |
за |
быстрыми |
изменениями |
|
сообщения l (t ). Рисунок 11.9 иллюстрирует такие искажения. |
|
|||
Системы с ДМд имеют более высокую частоту следования отсчетов по сравнению с системами ИКМ и ДИКМ.
Рисунок 11.9.
При ДМд на каждый отсчет приходится один импульс, а при ИКМ — несколько в зависимости от числа уровней, поэтому частота следования
импульсов и в той, и в другой системах |
при одной и той же верности |
передачи примерно одинакова. При одной и |
той же полосе система с ДМд |
реализуется более просто, чем система с ИКМ. |
|
Частота дискретизации в системах с ДМд может быть снижена путем введения переменного шага квантования, зависящего от скорости изменения сообщения: на участках с более высокой крутизной шаг квантования увеличивается. Для этого требуется вводить анализатор плотности единиц, который фиксирует наличие определенного числа следующих подряд символов одного знака и формирует последовательность импульсов. Эта последовательность
интегрируется, и результат подается на амплитудный ,модулятор