

Кинематика поступательного и вращательного движения
..pdf20
4 КИНЕМАТИКА
4.1 Пространство и время. Система отсчета. Постановка задачи Движением тел и, в частности, материальных точек называется изменение их
положения в пространстве со временем. Положение тела определяется только по отношению к каким-либо другим телам. Поэтому, чтобы описать движение тела, необходимо условиться, относительно какого тела (или системы тел) рассматривается данное движение. Тело, относительно которого рассматривается положение движущегося тела,называетсяпространственнойсистемойотсчета.
В пространственной системе отсчета выбирают точку, которая принимается за начало отсчета. От этой точки и отсчитываются расстояния до исследуемых точек. Расстояния отсчитываются с помощью эталонов длины. За единицу измерения длиныбыл выбранметр.
Перейдемк вопросу овремени.
Понятия пространства и времени относятся к фундаментальным понятиям. Это означает, что им нельзя дать определения через другие понятия. В этом случае дают способы измерения этих величин, темсамыми устанавливается их точный смысл.
Под временем в количественном смысле мы будем понимать показания каких-
то часов. Под часами понимают тело или систему тел, в которых происходит некоторый периодический процесс. Примерами таких процессов могут служить колебания маятника, вращение Земли, колебания электромагнитного поля, возникающего при переходе электрона с одного энергетического уровня на другой уровень и др. Точнее надо говорить не о времени, а промежутке времени, который характеризуется разностью показаний часов в рассматриваемые моменты времени. Предполагают, что один из этих моментов привязан к некоторому событию в том месте, где находятся часы и фиксирован. Он принимается за начало отсчета времени. За единицувременипринятасекунда.
Пространственная система отсчета плюс часы полностью определяютсистему отсчета.
Не установив систему отсчета, бессмысленно говорить о движении тел, т.к. в одной системе отсчета тело может покоиться, а в другой то же самое тело двигаться. В каждой конкретной задаче выбор системы отсчета производится так, чтобы максимально упростить ее решение.
Описать движение точки означает ответить на вопрос о том, где она будет находиться в любой момент времени, т.е. иметь информацию о ее положении в пространстве.
При изучении законов механики (законы Ньютона, законы сохранения механических величин) существенны и другие кинематические величины – скорость и ускорение. Положение точки, её скорость и ускорение называются
линейными кинематическими параметрами. Строгие определения этих величин мыдадимчуть позже.
21
Описывать движение тел более трудная задача. Описать движение тела – это значит иметь информацию о движении всех материальных точек, составляющих тело.
В общем случае тело может двигаться весьма сложным образом, например, движение подброшенной монеты. При этом очевидно, что все точки монеты движутся по разным траекториям, будут иметь разные скорости и разные ускорения. Как быть в этом случае? Движение какой точки надо описывать? Задача получения информации о движении всех точек тела может показаться неразрешимой. В этом случае поступают следующим образом.
Любое движение тела можно представить как совокупность
поступательногоивращательногодвижений.
Поступательным движением абсолютно твердого тела называют такое движение, при котором любая прямая, проведенная между двумя любыми материальными точками тела, при движении остается все время параллельной самой себе. При поступательном движении все точки тела описывают одинаковые по форме траектории, имеют одинаковые скорости и ускорения. Именно этим поступательное движение удобно для описания: достаточно описать движение только одной, причем любой, точки тела. Все остальные точки тела при поступательномдвижении движутся точно также.
Вращательным движением тела называют такое движение, при котором все точки тела описывают окружности, центры которых лежат на одной прямой, называемой осью вращения. При вращательном движении, в отличие от поступательного, у всех точек тела разные скорости и ускорения и, поэтому, скорость или ускорение какой-либо точки не может служить кинематической характеристикой движения всего тела.
Однако можно заметить, что угол поворота для всех точек тела одинаков и, следовательно, его можно и нужно использовать для описания вращательного движения тела. В соответствии с этим, для характеристики вращательного движения вводят угловые кинематические параметры – угловые скорость и ускорение,
посколькуименно они являются одинаковыми для всех точектела.
Итак, если научиться описывать движение точки с помощью линейных и угловых кинематических параметров, то это позволит описать любое сложное движение тела. Например, движение твёрдого тела, центр масс которого движется поступательно по произвольной траектории, а само тело вращается относительно оси, направление которой в пространстве также изменяется. Поступательное движение описывается с помощью линейных кинематических параметров, а вращательное движение тела и оси– с помощьюугловых.
22
4.2 Линейные кинематические параметры
Как уже отмечалось, достаточно полное описание движения точки должно содержать информацию о трех кинематических параметрах для любого момента времени: о положении точки в выбранной системе координат, о скорости и ускорении точки. Вообще говоря, все эти параметры связаны между собой, и знание одного из них плюс начальные их значения, позволяет определить остальные параметры.
Перемещение
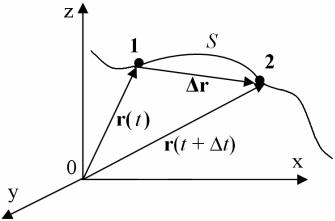
Допустим, что в момент времени t точка находилась в положении 1. Через время t точка оказалась в положении 2 (рис 2.1).
Положение точки определяется радиус-вектором r(t). Это вектор, проведенный из начала отсчета в данную точку.
Например, положение 1 характеризуется вектором r(t), а положение 2 характеризуется вектором r(t + t).
При движении тела конец радиус-вектора r(t), с течением времени, будет описывать траекторию движения. Траектория – это линия, описываемая движущейся материальной точкой в пространстве. Если траектория – прямая линия, то движение называется прямолинейным. В противном случае –
криволинейным.
Рисунок 4.1 – К определениям понятий радиус-вектор, траектория, путь, перемещение
Длина траектории называется путем S.
Перемещением точки называется вектор r, проведенный из начальной точки движения 1 в конечную точку 2.
Из рис. 4.1 видно r(t) + r = r(t + t). Отсюда следует:
r = r(t + t) – r(t). (4.1)
Следовательно, перемещение r точки за время t – это разность конечного и начального положений точки.
23
Законом движения материальной точки называется зависимость координат этой точки от времени: rx = rx(t), ry = ry(t), rz = rz(t).
Скорость
Когда мы хотим объяснить, как быстро передвигалась материальная точка, то есть какова ее скорость, мы говорим, что она за какую-то единицу времени прошла такое-то расстояние.
Если за время t точка совершила перемещение r, то отношение r/ t будет характеризовать среднюю скорость ‹v› точки за время t.
‹v› = r/ t. |
(4.2) |
Конечно, при этом точка на этом участке может двигаться неравномерно. Например, свободно падающее тело за каждую секунду проходит разные расстояния. При этом мы также понимаем, что в начале и в конце каждой секунды тело имело разные скорости.
Если мы будем пытаться определять скорость в момент времени t, то, очевидно, нужно уменьшать промежуток времени t, и в течение этого промежутка определять перемещение r материальной точки. До какого предела можно уменьшать промежутки времени t? При этом r также будет стремиться к нулю. Есть ли предел отношению r/ t?
Предел отношения r/ t существует и будет точно определять мгновенную скорость точки.
Мгновенной скоростью v(t) в момент времени t называется предел отношения r/ t при t стремящимся к нулю. В математике такой предел называется производной от радиус-вектора r(t) по времени t и обозначается dr/dt (см. главу 2).
v(t) lim |
r(t t) r(t) |
lim |
r |
|
dr |
. |
(4.3) |
t |
|
|
|||||
t 0 |
t 0 t |
|
dt |
|
|||
При стремлении t к нулю ( r → 0) направление перемещения dr совпадает с направлением касательной к траектории движения точки в момент времени t (рис. 4.1).
Поэтому направление вектора скорости v(t) всегда совпадает с направлением касательной в данной точке траектории и указывает направление движения материальной точки.
Определим модуль вектора скорости v:
|
v(t) |
|
v(t) |
lim |
r |
|
|
dr |
. |
(4.4) |
|
|
|
||||||||
|
|
|
|
|
||||||
|
|
|
|
t 0 t |
|
|
dt |
|
||
|
|
|
|
|
|
|||||
Так как при стремлении t к нулю модуль перемещения r стремится к длине дуги S, то dr = dS, и поэтому модуль скорости v равен производной пути S по времени t.
24 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
|
dS |
v. |
|
(4.5) |
|||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
dt |
|
||||||||
|
|
|
dt |
|
|
|
|
|
|
|||||||
Компоненты скорости равны производным соответствующих координат по |
||||||||||||||||
времени. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
dx |
, |
v |
|
|
dy |
, |
v |
dz |
. |
||||
|
|
|
|
|
||||||||||||
|
x |
|
|
dt |
|
y |
|
dt |
z |
dt |
||||||
Модуль скорости, выраженный через компоненты скорости равен:
v(t) |
|
v2 |
v2 |
v2 . |
(4.6) |
||
|
|
|
|
x |
y |
z |
|
Модуль средней скорости |
|
v |
|
и средний модуль скорости |
v могут суще- |
||
|
|
||||||
|
|
|
|
|
|
|
|
ственно отличаться.
Модуль средней скорости 
 v
v
 определяется как отношение модуля пере-
определяется как отношение модуля пере-
мещения за некоторый промежуток времени к данному промежутку времени. Средний модуль скорости  v
v определяется как отношение всего пройден-
определяется как отношение всего пройден-
ного пути за некоторый промежуток времени к данному промежутку времени. Например: точка движется равномерно по окружности радиуса R. За пери-
од обращения T перемещение точки равно нулю, так как начало и конец вектора перемещения находятся в одной и той же точке. Следовательно, модуль средней скорости 
 v
v
 за время T равен нулю. Путь же, пройденный точкой за время T,
за время T равен нулю. Путь же, пройденный точкой за время T,
равен 2 R и средний модуль скорости  v
v будет равен:
будет равен:  v
v 2 R . Легко убе-
2 R . Легко убе-
T
диться, что в приведенном примере модуль средней скорости 
 v
v
 зависит от выбранного промежутка времени t, а средний модуль скорости
зависит от выбранного промежутка времени t, а средний модуль скорости  v
v не зависит.
не зависит.
Ускорение
Если скорость v(t) показывает, как изменяется радиус-вектор r точки со временем, то ускорение a(t) показывает, как изменяется скорость v точки. Повторив предыдущие рассуждения, касающиеся скорости, можно прийти к следующим определениям ускорений.
Мгновенным ускорением a(t) называется предел отношения приращения скорости v к промежутку времени t, за который произошло это приращение,
при стремлении t к нулю: |
v |
|
|
|
|
a(t) lim |
|
dv |
. |
(4.7) |
|
|
|
||||
t 0 |
t dt |
|
|||
Более краткая формулировка: мгновенное ускорение это производная скорости по времени.
Введём понятия тангенциального и нормального ускорений.
25
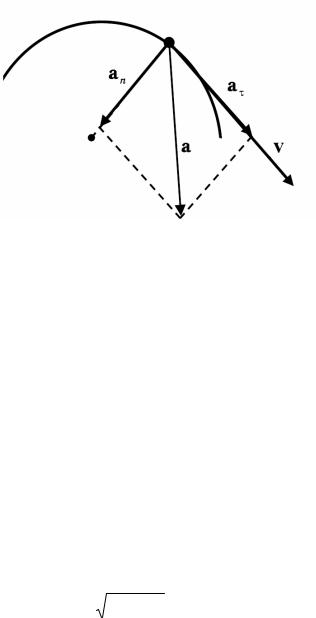
Тангенциальная составляющая ускорения a – вектор, направленный вдоль вектора скорости v, и по модулю равный изменению скорости по абсолютной величине (см. рис 4.2).
Нормальным ускорением an называется вектор, направленный по нормали к траектории (вектору скорости) и отвечающий за изменение скорости по направлению (см. рис 4.2).
Рисунок 4.2 – Векторы тангенциального a , нормального an , полного a ускорений материальной точки и вектор скорости v.
Каждому бесконечно малому участку искривленной траектории можно сопоставить дугу окружности радиуса R, которая сливается с ним на этом участке. Радиус этой окружности характеризует кривизну траектории в данной точке. Поэтому движение точки на криволинейном бесконечно малом отрезке траектории можно представить как движение по окружности радиуса R. Тогда, модуль нормального ускорения можно определить, как
|
|
v2 |
|
|
|
|
|
||
an |
|
|
. |
(4.8) |
|
||||
|
|
R |
|
|
Вектор полного ускорения является векторной суммой векторов тангенциального и нормального ускорений (см. рис 2.2):
a a |
an . |
(4.9) |
Так как векторы тангенциального и нормального ускорений взаимно перпендикулярны, то модуль полного ускорения можно определить по теореме Пифагора:
a a2 |
a2 . |
(4.10) |
|
n |
|
Таким образом, зная зависимость r(t), можно найти скорость v и ускорение a точки в каждый момент времени. Это прямая задача кинематики.
В СИ единицами длинны, скорости и ускорения являются соответственно метр (м), метр на секунду (м/с), метр на секунду в квадрате (м/с2).
26
4.3 Уравнения движения
Возникает и обратная задача: можно ли найти v(t) и r(t), зная зависимость от времени ускорения a(t)? Оказывается, для получения однозначного решения этой задачи одной зависимости a(t) недостаточно, необходимо знать так называемые начальные условия, а именно скорость v0 и радиус-вектор r0 точки в некоторый начальный момент времени t = 0.
Движение материальной точки с постоянным ускорением (a = const), называется равнопеременным движением, которое описывается двумя векторными кинематическими уравнениями – законом изменения приращения:
t |
|
at |
2 |
|
|
r(t) v(t)dt v0t |
|
. |
(4.11) |
||
|
|
||||
0 |
2 |
|
|
|
|
и законом изменения скорости: |
at. |
|
|
(4.12) |
|
v(t) v0 |
|
|
|||
где v0 = v(t0) – начальная скорость. Если, в соответствии с (4.1), вместо приращения ввести начальный и конечный радиус-векторы материальной точки, то (4.11) перепишется в виде:
r(t) r |
v |
t |
at |
2 |
(4.13) |
|
|
||||
0 |
0 |
|
2 |
|
|
|
|
|
|
|
Если начало системы координат совпадает с начальным положением точки (r0 = 0), то уравнения движения (4.12) и (4.13) приобретают следующую форму:
r(t) v0t |
at |
2 |
, |
(4.14) |
2 |
|
|||
|
|
|
|
|
v(t) v0 at. |
(4.15) |
|||
Векторным уравнениям движения (4.14) и (4.15) соответствуют системы |
||||
скалярных уравнений для проекций на координатные оси: |
|
|||
|
|
|
a |
t |
2 |
, |
|
|
|
|
ayt2 |
, |
|
|
a t2 |
(4.16) |
||
r (t) v |
t |
x |
|
|
r (t) v |
t |
|
r (t) v t |
z |
|||||||||
x |
0x |
|
|
2 |
|
|
y |
0y |
|
2 |
|
z |
0z |
|
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
vx(t) v0x |
axt, |
|
|
vy(t) v0y |
ayt. |
|
vz(t) v0z |
azt |
(4.17) |
|||||||||
При определении проекций следует придерживаться следующего правила: если направление проекции на некоторую ось совпадает с выбранным положительным направлением этой оси, то проекция считается положительной. В противоположном случае – отрицательной.
Если вектор ускорения а параллелен вектору начальной скорости v0, то движение является равноускоренным (и прямолинейным); при этом скорость материальной точки возрастает: v > v0. Если вектор ускорения а антипараллелен вектору начальной скорости v0, то движение является равнозамедленным (и прямолинейным); при этом скорость материальной точки убывает: v < v0.

27
Если при движении материальной точки ее ускорение равно нулю, то такое движение называется равномерным. Из выражений (4.14) и (4.15), как частный случай, следуют уравнения равномерного движения:
r(t) v0t, |
(4.18) |
v(t) v0 . |
(4.19) |
Отсюда видно, что равномерное движение происходит без изменения ско-
рости (v = const).
4.4 Относительность движения. Закон сложения скоростей
Понятие движение тела является относительным. Так как, одно и то же тело в разных системах отсчёта может, как двигаться, так и покоиться. При этом, направление и модуль скорости движения тела, а также траектория движения зависят от выбора системы отсчёта.
Рассмотрим случай движения одной и той же точки М в различных системах отсчета. Пусть система K является неподвижной системой отсчета, а система K' движется относительно системы K со скоростью u. Обозначим через v вектор скорости точки М в неподвижной системе отсчета K, а через v' – вектор скорости этой же точки в подвижной системе K'. Связь между скоростями точки М в указанных системах отсчета дается классическим законом сложения скоростей (законом Галилея):
v v u. |
(4.20) |
Таким образом, скорость тела в неподвижной системе отсчёта v определяется как векторная сумма скорости тела в подвижной системе отсчёта v' и скорости u подвижной системы отсчёта K' относительно неподвижной K.
Рисунок 4.3 – Пример сложения скоростей при движении лодки в реке. Здесь система K – берег; система K' – течение воды в реке; v' – скорость лодки относительно воды; u – скорость течения реки относительно берега; v – скорость лодки относительно берега
28
4.5 Кинематика вращательного движения
Движение твёрдого тела, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой называется вращением тела вокруг неподвижной оси.
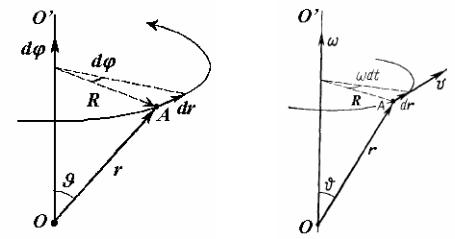
Пусть абсолютно твёрдое тело вращается вокруг неподвижной оси ОО'. Проследим за некоторой точкой A этого тела (рис. 4.4).
За время dt точка A совершает перемещение dr. При этом же угле поворота d другая точка, отстоящая на большее расстояние от оси вращения, совершит другое (большее) перемещение. Поэтому использовать перемещение dr любой точки твёрдого тела неудобно для характеристики вращения всего тела.
За время dt любая плоскость, связанная с твёрдым телом и проходящая через ось вращения, повернётся на угол d , или, что тоже самое, на угол d повернётся радиус-вектор R точки A, перпендикулярный оси вращения. Угол d служит характеристикой вращения всего твёрдого тела. Удобно ввести вектор d поворота тела, численно равный d и направленный вдоль оси вращения ОО' так, чтобы, глядя по направлению вектора d , мы видели вращение по часовой стрелке (рис. 4.4, а). Направление вектора d и направление вращения связаны
правилом правого винта (см. параграф 1.5, Е, рис. 1.7).
а) |
б) |
Рисунок 4.4 – Вращение тела относительно неподвижной оси. Векторы угла поворота d (а), угловой скорости (б), перемещения dr точки и
вектор скорости v.
Для характеристики быстроты вращения, по аналогии с линейной скоростью, вводят векторы средней и мгновенной угловой скорости.
|
|
|
|
|
|
|
d |
|
|
|
ср |
|
|
; lim |
|
|
|
(4.21) |
|
t |
t |
dt |
|||||||
|
|
t 0 |
|
|
Векторы и d направлены в одну сторону (рис. 4.4). Если = const, то вращение является равномерным.
29
Рассмотрим связь между линейной скоростью v точки A и её угловой скоростью .
За время dt точка A проходит путь равный
Следовательно, |
v |
dS |
R |
d |
R . |
dt |
|
||||
|
|
|
dt |
||
Таким образом, v R . |
|
|
(4.22) |
||
Из рисунка видно, что векторы v и v R, т.е. вектор v есть векторное |
|||||
произведение. |
|
|
|
|
|
v ω,R |
|
|
(4.23) |
||
Или в скалярной форме: v R sin ω,R . |
Причём, |
sin ω,R 1. |
|||
Наряду с угловой скоростью используются понятия периода Т и частоты вращения .
Период вращения Т – это промежуток времени, в течение которого тело совершает один полный оборот, т.е. поворот на угол = 2 .
Частота вращения – это число оборотов за единице времени. Период и частота связаны с угловой скоростью выражениями:
|
2 |
2 , |
T |
2 |
, |
|
1 |
. |
|
T |
|
|
T |
||||
Угловое ускорение вводится для характеристики неравномерного вращения тела. Угловое ускорение является вектором. Векторы среднего и мгновенного углового ускорения:
ε |
|
|
ω |
, |
|
|
|
|
ε lim |
ω |
|
dω |
|
|||
|
ср |
|
t |
|
|
|
|
|
|
|
|
t 0 |
t |
|
dt |
|
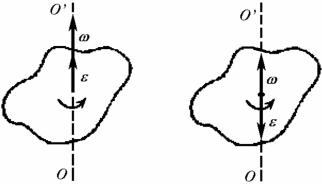
Вектор углового ускорения направлен в ту же сторону, что и вектор |
||||||||||||||||
|
|
|
d |
|
|
|
|
|
|
|
|
|||||
при ускоренном вращении |
|
|
|
|
|
0 |
|
(рис. 4.5, а) и в противоположную сторону |
||||||||
|
|
dt |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
при замедленном вращении |
d |
0 |
|
(рис. 4.5, б). |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
||||
а) |
б) |
Рисунок 4.5 – Направление векторов угловой скорости и углового ускорения ε при равноускоренном (а) и равнозамедленном вращении (б).