

Примеры решения лабораторных работ / Программирование 8535 на СИ
.pdf-два 16-разрядных регистра сравнения OCR1A, OCR1B;
-два 8-разрядных регистра управления TCCR1A, TCCR1B.
Каждый |
из 16-разрядных регистров физически размещается в двух |
регистрах |
||||
ввода/вывода, |
названия |
которых получаются |
добавлением к |
названию |
регистра |
|
буквы «Н» |
(старший байт) и «L» (младший |
байт). Счетный регистр |
таймера |
|||
счетчика TCNT1, например, размещается в регистрах TCNT1H:TCNT1L. |
|
|||||
Счетный регистр TCNT1 и регистры сравнения OCR1A и OCR1B |
|
|
||||
Как только таймер |
Т1 запускается, то |
при |
поступлении |
очередного |
импульса |
|
с источника (им является выход предделителя, на вход которого |
подается сигнал с |
||
тактового генератора или импульсы со входа |
T1) содержимое |
счетного |
регистра |
TCNT1 увеличивается на единицу. Так будет |
происходить непрерывно до |
тех пор, |
|
пока не наступит переполнение счетчика или принудительное его обнуление. При переполнении регистра TCNT1 возможна генерация прерывания TIMER0_OVF по переполнению таймера Т1.
Врегистры сравнения OCR1A и OCR1B записываются необходимые
пользовательские значения. При совпадении регистров OCR1A или OCR1B напряжения изменяются. Этот момент можно использовать совпадению TIMER1_СОМРA и TIMER1_СОМРA.
значений счетного |
регистра |
и |
|
на |
выходах OC1A |
или OC1B |
|
для |
генерирования прерываний |
по |
|
Регистры управления TCCR1A и TCCR1B
Для управления таймером/счетчиком используются два регистра управления:
TCCR1A, TCCR1B. |
Форматы этих регистров и назначение отдельных битов - |
приведены в табл. 1.3. |
|
Табл. 1. Разряды регистра TCCR1A
Бит |
Название |
|
|
Описание |
|
|
||
|
|
|
|
|
|
|
||
7,6 |
COM1A1:COM1A0 |
Режим работы |
блоков сравнения |
A и |
В. |
Эти разряды определяют |
||
поведение выводов ОС1А |
и |
ОС1В |
при наступлении события |
|||||
|
|
|||||||
5,4 |
COM1B1:COM1B0 |
«Совпадение». Влияние содержимого этих разрядов на состояние |
||||||
|
|
вывода зависит от режима работы таймера/счетчика |
||||||
3,2 |
FOC1A:FOC1B |
Принудительное |
изменение |
состояния |
выводов соответственно |
|||
OC1A и OC1B |
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
|
||||||
|
|
Режим работы таймера/счетчика. Совместно с разрядами |
||||||
1,0 |
WGM11:WGM10 |
WGM13:WGM12 регистра TCCR1B определяют режим работы |
||||||
|
|
таймера/счетчика Т1 |
|
|
|
|
||
Табл. 2. Формат регистра TCCR1B
Бит |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
Обозначение |
ICNC1 |
ICES1 |
- |
WGM13 |
WGM12 |
CS12 |
CS11 |
CS10 |
|
|
|
|
|
|
|
|
|
Примечание: биты WGM13...WGM10 используются в основном |
для работы |
таймера в режимах ШИМ. Содержимое битов COM1n1:COM1n0 тоже |
должно быть |
«0» при отсутствии связи таймера 1 с выводами OC1x. |
|
Значения разрядов CS12...CS10 определяют коэффициент деления тактовой частоты и источник тактовых импульсов для таймера Т1. Их возможные значения представлены в табл. 3.
Табл. 3. Выбор коэффициента предделителя таймера Т1
Биты TCCR1B |
Коэффициент предделителя таймера Т1 |
|||
|
|
|
||
CS12 |
CS11 |
CS10 |
||
|
||||
0 |
0 |
0 |
Таймер/счетчик остановлен |
|
0 |
0 |
1 |
clkI/o |
|
0 |
1 |
0 |
clkI/o/8 |
|
0 |
1 |
1 |
с1кю/64 |
|
1 |
0 |
0 |
clkI/o/256 |
|
1 |
0 |
1 |
clkI/o/1024 |
|
1 |
1 |
0 |
Вывод T1, счет осуществляется по спадающему фронту импульсов |
|
1 |
1 |
1 |
Вывод Т1, счет осуществляется по нарастающему фронту импульсов |
|
Регистр захвата ICR1
Регистр захвата ICR1 входит в состав блока захвата, назначение которого -
сохранение в |
определенный |
момент |
времени состояния |
таймера/счетчика в |
регистре захвата |
ICR1. Это |
действие |
может производиться |
либо по активному |
фронту сигнала на выводе ГСР микроконтроллера, либо по сигналу от аналогового
компаратора. |
Одновременно |
с |
записью в |
регистр |
захвата |
устанавливается |
флаг |
||||||||||
ICF1 регистра TIFR и генерируется запрос на прерывание. Разрешение прерывания |
|||||||||||||||||
осуществляется |
установкой |
разряда |
TICIE1 |
регистра |
TIMSK. |
Для |
управления |
||||||||||
схемой захвата используются два разряда |
регистра |
TCCR1B |
- |
ICNC1 |
(бит 7) и |
||||||||||||
ICES1 (бит 6). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разряд |
ICNC1 |
управляет |
схемой |
подавления помех. Если этот разряд |
|||||||||||||
сброшен в «0», схема подавления помех |
выключена |
и |
захват |
производится |
по |
||||||||||||
первому же активному фронту. Если же |
этот |
разряд |
установлен в «1», |
то |
при |
||||||||||||
появлении |
активного |
фронта |
производится |
4 выборки с частотой, равной тактовой |
|||||||||||||
частоте микроконтроллера. Захват будет выполнен только в том случае, если |
все |
||||||||||||||||
выборки |
имеют |
уровень, соответствующий |
активному |
фронту |
сигнала |
(логическая |
|||||||||||
«1» для нарастающего и логический 0 для спадающего). |
|
|
|
|
|
|
|
|
|||||||||
Активный фронт сигнала, т. е. |
фронт, по которому будет выполнено |
||||||||||||||||
сохранение содержимого счетного регистра в регистре |
|
захвата, |
определяется |
||||||||||||||
состоянием разряда ICES1. Если этот разряд сброшен в «0», то активным является |
|||||||||||||||||
спадающий |
фронт. |
Если |
разряд |
установлен |
в |
«1», |
то |
активным |
является |
||||||||
нарастающий фронт. Для захвата по сигналу с вывода ГСР, этот вывод должен быть
сконфигурирован |
как |
входной |
(разряд |
регистра |
DDRx, |
соответствующий выводу |
||||
ICP, должен быть сброшен в «0»). |
Если |
же |
он будет |
сконфигурирован как |
||||||
выходной, |
захват |
можно |
будет |
осуществлять |
программно, |
управляя |
||||
соответствующим |
разрядом порта. Следует |
понимать, |
что |
между |
изменением |
|||||
состояния входа |
блока захвата и копированием счетного регистра в регистр захвата |
||||||
таймера/счетчика |
проходит |
некоторое |
время. |
Эту |
задержку |
вносит |
каскад, |
состоящий из синхронизатора и детектора фронта. Величина задержки составляет |
|
||||||
2,5..3,5 машинных циклов. При включении схемы подавления помех задержка увеличивается еще на 4 машинных цикла.
Регистры разрешения и обработки прерываний TIMSK и TIFR |
|
|
|
|
||||||||
Для |
разрешения/запрета прерываний от таймеров/счетчиков |
предназначен |
||||||||||
регистр TIMSK |
(Timer/Counter |
Interrupt MaSK Register |
- |
регистр |
маски |
|||||||
прерываний |
от |
таймеров/счетчиков). |
Для |
таймера |
Т1 |
в |
этом |
регистре |
||||
задействованы следующие биты: |
|
|
|
|
|
|
|
|
|
|||
- |
ТГСШ1 |
(бит |
5) - флаг |
разрешения |
прерывания |
по |
событию |
«Захват» |
||||
таймера Т1; |
|
|
|
|
|
|
|
|
|
|
|
|
- |
ОСГЕ1А (бит 4) - флаг |
разрешения |
прерывания |
по |
событию |
«Совпадение |
||||||
А» таймера Т1; |
|
|
|
|
|
|
|
|
|
|
|
|
- |
OCTE1B (бит 3) - флаг разрешения прерывания по |
событию |
«Совпадение |
|||||||||
B» таймера Т1; |
|
|
|
|
|
|
|
|
|
|
|
|
- |
T0IE1 (бит 2)- флаг разрешения прерывания по переполнению таймера Т1. |
|||||||||||
Для индикации наступления прерываний от таймеров предназначен регистр |
|
|||||||||||
TIFR (Timer/Counter Interrupt Flag Register |
- |
регистр |
флагов |
прерываний от |
||||||||
таймеров/счетчиков). |
Для |
таймера |
Т1 |
в этом |
|
регистре |
задействованы |
следующие |
||||
биты: |
|
|
|
|
|
|
|
|
|
|
|
|
-ICF1 (бит 5) - флаг прерывания по событию Захват» таймера Т1;
-0CF1A (бит 4)- флаг прерывания по событию «Совпадение А» таймера Т1;
-0CF1B (бит 3)- флаг прерывания по событию «Совпадение B» таймера Т1;
-T0V1 (бит 2) - флаг прерывания по переполнению таймера Т1.
При наступлении какого-либо |
события соответствующий |
флаг |
регистра |
TIFR устанавливается в «1». При запуске подпрограммы обработки прерывания он |
|||
аппаратно сбрасывается в «0». Любой |
флаг может быть сброшен |
в «0» |
вручную |
путем записи в него логической «1». |
|
|
|
Примеры
Пример 1. В качестве примера, рассмотрим программу, которая выводит в
двоичном коде на |
P0RTC число |
секунд между двумя передними фронтами сигнала |
на ICP(PD6). Т. е. |
используется |
прерывание по захвату таймера Т1. Максимальное |
возможное значение выводимого времени равно Т=1024-65535/(8-106)=8,38 с. При
большей продолжительности паузы таймер переполнится и начнёт считать сначала.
// ---------------------------------------------------------------
//Счёт времени с помощью 16-ти разрядного таймера //Входы: ICP(PD6) - подключаем к кнопке
//Выходы: Порт С - на светодиоды
#include <iom8535v.h> #include <macros.h>
unsigned int v;
void port_init(void) |
|
{ |
|
PORTC = 0x00; |
|
DDRC = 0xFF; |
// порт С работает на выход |
}
void timer1_init(void) // инициализация таймера Т1
{ |
|
|
|
|
TCCR1B |
= 0x00; |
// |
Остановка таймера |
|
TCNT1H |
= 0x00; |
// |
Установка начального |
|
TCNT1L |
= 0x01; |
// |
значения счётного регистра |
|
TCCR1A |
= 0x00; |
// |
Запуск таймера в режиме |
Normal, |
|
|
|
|
// предделитель 1024, захват происходит |
TCCR1B |
= 0xC5; |
|
// по нарастающему фронту сигнала на ICP, |
|
|
|
|
|
// при этом включена защита от помех |
} |
|
|
|
|
//Подпрограмма обработки прерывания по захвату Т1 |
||||
#pragma |
interrupt_handler timer1_capt_isr:6 |
|||
void timer1_capt_isr(void) |
|
|||
CLI (); |
|
|
|
|
TCCR1B |
= 0; |
|
// |
Остановка таймера |
v=ICR1L; |
|
// |
Считывание значения регистра захвата |
|
v|=(int)ICR1H << 8; |
|
|
||
PORTC=v/7812; |
// |
Из единиц таймера переводим это значение в |
||
|
|
|
// секунды и выводим в порт С |
|
TCNT1H |
= |
0x00; |
// |
Установка начального |
TCNT1L |
= |
0x01; |
// |
значения счётного регистра |
TCCR1B |
= |
0xC5; |
// |
Запуск таймера |
SEI(); |
|
|
|
|
} |
|
|
|
|
void init_devices(void)
{
CLI (); |
|
|
port_init(); |
|
|
timer1_init(); |
|
|
TIMSK = 0x20; |
//Разрешение прерывания |
позахвату таймера Т1 |
SEI(); |
|
|
} |
|
|
void main(void) |
|
|
{ |
|
|
init_devices(); |
|
|
for (;;); |
|
|
} |
|
|
Пример 2. Рассмотрим работу таймера Т1 в режиме |
широтно-импульсной |
уляции. Программа использует оба выхода OCR1A |
и OCR1B таймера Т1, |
чем скважности этих каналов набираются раздельно - на младшей и старшей
адах порта A.
// ---------------------------------------------------------------
//Использование таймера Т1 в режиме широтно-импульсной модуляции
//Входы: PA0-PA3 - задают скважность канала A |
|
|||
// |
PA4-PA7 - канала В. |
|
|
|
//В итоге |
получаем по |
16 скважностей для |
каждого |
канала |
//Выходы: |
OCR1A (PD5) |
- ШИМ-выход канала |
А |
|
// |
OCR1B (PD4) - ШИМ-выход канала B |
|
||
#include <iom8535v.h> #include <macros.h>
void port_init(void)
{
PORTA = 0x00; |
|
|
|
|
||
DDRA = 0x00; |
|
|
//Порт А настраиваем как вход |
|||
PORTD = 0x00; |
|
|
|
|
||
DDRD = 0x30; |
|
//Порт D - выход |
|
|||
} |
|
|
|
|
|
|
void timer1_init(void) |
|
|
//Инициализация таймера Т1 |
|||
{ |
|
|
|
|
|
|
TCCR1B = |
0x00; |
//Таймер пускаем в режиме 10-ти битного быстрого |
||||
TCCR1A = |
0xA3; |
//ШИМа, с предделителем 1, выводы OC1A и OC1B при |
||||
TCCR1B = |
0x09; |
//совпадении сбрасываются в «0» |
|
|||
} |
|
|
|
|
|
|
void init_devices(void) |
|
|
|
|
||
{ |
|
|
|
|
|
|
CLI(); |
|
|
|
|
|
|
port_init(); |
|
|
|
|
||
timer1_init() ; |
|
|
|
|
||
SEI(); |
|
|
|
|
|
|
} |
|
|
|
|
|
|
void main(void) |
|
|
|
|
||
{ |
|
|
|
|
|
|
init_devices() ; |
|
|
|
|
||
for (;;) |
|
|
|
|
|
|
{ |
|
|
|
|
|
|
OCR1AH=(PINA&0x0F) |
>> 2; |
// |
записываем в регистр сравнения А |
|||
OCR1AL=(PINA&0x0F) |
<< 6; |
// |
значение новой скважности с PA0-PA3 |
|||
OCR1BH=(PINA&0xF0) |
>> 6; |
// |
записываем в регистр сравнения B |
|||
OCR1BL=(PINA&0xF0) |
<< 2; |
// |
значение новой скважности с PA4-PA7 |
|||
} |
|
|
|
|
|
|
} |
|
|
|
|
|
|
// --------------------------------------------------------------- |
||||||
|
|
|
Задание на выполнение |
|
||
1. |
Напишите программу включения/выключения выхода PD0 с заданным |
|||||
периодом: |
|
|
|
|
|
|
а) 1 мс |
|
б) 5 мс |
|
|
в) 10 мс |
г) 20 мс |
д) 50 мс |
е) 100 мс |
|
ж) 500 мс |
з) 1 с |
||
и) 2 с |
|
к) 5 с |
|
|
|
|
2. |
Реализуйте программу светофор: |
|
||||
- |
в дневном режиме продолжительность включения сигналов красный, |
|||||
желтый, зеленый, желтый 5с/1с/3с/0,5с; |
|
|
|
|||
- |
в ночном режиме включается только желтый свет - 0,5с горит, 1 с - не |
|||||
горит. |
|
|
|
|
|
|
Режим включения задается входом PB0. |
|
|||||
3. |
Напишите программу расчета частоты генератора (на модуле вход |
|||||
генератора 50 Гц) с точностью до сотых долей герц. Результат вывести: |
||||||
- |
в двоичном коде; |
|
|
|
|
|
- |
на семисегментный индикатор. |
|
||||
4. Составьте программу, показывающую время между двумя нажатиями кнопки с точностью до 0,1 с. Считать до 999,9 с. Вывести это число на семисегментный индикатор.
5.Напишите программу, реализующую задержку переднего фронта сигнала с
тумблера. Задержку задавать в |
секундах в двоичном коде с помощью пяти |
|
оставшихся тумблеров. Если продолжительность |
сигнала на входе меньше |
|
продолжительности установленной |
задержки, то срабатывания сигнала на выходе |
|
не происходит. |
|
|
6.Используя программу «Пример 2» реализуйте 8-ми разрядный ШИМ с
выводом |
значения |
скважности |
на |
семисегментные |
индикаторы. |
Скважность |
задается двоичным кодом (тумблерами и кнопками). |
|
|
||||
7. |
Составьте |
программу, |
которая в течение 10 |
секунд плавно изменяет |
||
скважность от 0 до 1, и затем в течение 5 с - от 1 до 0 (использовать таймер Т1 в режиме ШИМ).
Работа №6. Использование аналого-цифрового преобразователя
Цель работы
Познакомиться с работой АЦП микроконтроллера ATmega8535. Составить и отладить программу работы с АЦП (прием кода и выдача его или напряжения на индикацию).
Пояснения к работе
Микроконтроллер ATMega8535 позволяет вводить и обрабатывать до 8 аналоговых сигналов. Для этого в состав контроллера входит 10-разрядный АЦП последовательного приближения. Основные параметры этого АЦП следующие:
-абсолютная погрешность: ±2 МЗР;
-интегральная нелинейность: ±0.5 МЗР;
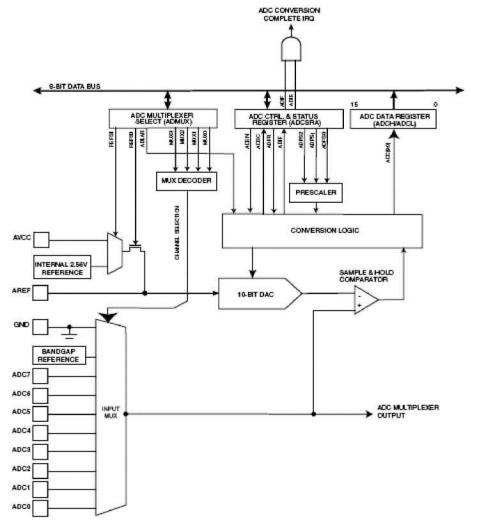
-время преобразования: 65.260 мкс. Структурная схема АЦП приведена на рис. 1.
Рис. 1. Структурная схема АЦП микроконтроллера
АЦП содержит:
- 8-ми канальный аналоговый мультиплексор с дешифратором каналов;
-внутренний источник опорного напряжения 2,56В со схемой выбора;
-АЦП последовательного приближения;
-предделитель для выбора времени преобразования сигнала.
Для ввода аналоговых сигналов ADC0...ADC7 в контроллере используются |
||||||||||
альтернативные |
функции |
порта |
А, |
соответственно |
выводы |
PA0...PA7 |
||||
(приложение 1). Следует обратить |
внимание, что биты портов, используемые как |
|||||||||
входы |
АЦП, |
должны |
быть |
запрограммированы |
как |
входы, |
при |
этом |
||
подтягивающие |
резисторы |
должны |
быть |
выключены, |
иначе это |
приведет |
к |
|||
искажению входного напряжения. |
|
|
|
|
|
|
|
|||
Как видно из рис. 1, на вход АЦП может подаваться |
сигнал |
с одного |
из |
|||||||
входов |
ADC0...7, фиксированное |
напряжение 1,22 В |
(Bandgap Reference) |
|
или |
|||||
напряжение 0 В. В качестве источника опорного напряжения для АЦП может
использоваться как |
напряжение питания микроконтроллера, |
так и |
внутренний |
(2,56 В) либо внешний источник опорного напряжения. АЦП |
может |
формировать |
|
сигнал прерывания |
при окончании цикла преобразования |
(ADC |
Conversion |
Complete IRQ). |
|
|
|
Регистры АЦП
Управление работой АЦП выполняется с помощью 4 регистров:
-регистр выбора канала АЦП и источника опорного напряжения ADMUX;
-регистр управления и статуса АЦП ADCSRA;
-два регистра данных ADCH, ADCL (так как выходной код АЦП 10разрядный, то используются эти 2 регистра).
Регистр выбора канала ADMUX
Номер входного канала АЦП и источник опорного напряжения задаются в регистре ADMUX (табл. 1).
Табл. 1. Разряды регистра ADMUX
Разряд |
Название |
Описание |
7,6 |
REFS1:REFS0 |
Выбор источника опорного напряжения |
5 |
ADLAR |
Выравнивание результата преобразования |
4...0 |
MUX4...MUX0 |
Выбор входного канала |
Два старших разряда этого регистра определяют тип источника опорного
напряжения ИОН (табл. 2). Опорное напряжение определяет |
напряжение, при |
котором выходной код максимален (для 10-разрядного АЦП - это |
1023). Младшие |
4 разряды регистра позволяют выбрать номер канала АЦП (табл. 3). Результат
преобразования |
аналогового |
сигнала |
размещается |
в |
двух |
8-ми |
разрядных |
||||
регистрах. |
Для |
управления |
|
выравниванием |
результата |
преобразования |
(10-ти |
||||
битного |
кода) |
служит разряд |
ADLAR регистра |
ADMUX. |
Если |
этот |
разряд |
||||
установлен в «1», результат преобразования выравнивается по левой границе 16разрядного слова, размещенного в регистрах ADCH:ADCL, если сброшен в «0» - по правой границе.
Табл. 2. Выбор источника опорного напряжения
6,7 биты ADMUX |
Источник опорного напряжения |
|
|
||
REFS1 |
REFS0 |
|
|
|
|
0 |
0 |
Внешний ИОН, подключенный к выводу AREF; внутренний ИОН отключен |
0 |
1 |
Напряжение питания AVCC |
|
|
|
1 |
1 |
Внутренний ИОН 2,56В, подключенный к выводу AREF |
Табл. 3. Управление входным мультиплексором
4...0 биты ADMUX |
Номер канала АЦП |
|
|
||
MUX4...MUX0 |
||
|
||
|
|
|
00000 |
ADC0 |
|
00001 |
ADC1 |
|
|
||
00010 |
ADC2 |
|
|
||
00011 |
ADC3 |
|
00100 |
ADC4 |
|
|
||
00101 |
ADC5 |
|
00110 |
ADC6 |
|
00111 |
ADC7 |
|
|
||
|
|
|
10000 |
ADC0ADC1 |
|
|
||
|
|
|
11110 |
1.22 В |
|
11111 |
0B (GND) |
Регистр управления и статуса ADCSRA
Регистр ADCSRA позволяет запустить и остановить работу АЦП, выбрать режим работы (одиночный или непрерывный), разрешить работу прерывания по окончании преобразования АЦП, а также задать длительность преобразования аналогового сигнала в цифровой код. Назначение битов регистра приведено в табл. 4.
Табл. 4. Биты регистра ADCSRA _____________________________________________________
Разряд |
Название |
Описание |
7 |
ADEN |
Разрешение АЦП (1 - включено, 0 - выключено) |
6 |
ADSC |
Запуск преобразования (1 - начать преобразование) |
5 |
ADFR |
Выбор режима работы АЦП |
4 |
ADIF |
Флаг прерывания АЦП |
3 |
ADIE |
Разрешение прерывания АЦП |
2...0 |
ADPS2:ADPS0 |
Выбор частоты преобразования |
|
|
Разрешить работу АЦП можно установкой бита ADEN регистра ADCSRA в состояние логической «1».
Для запуска АЦП необходимо установить в «1» бит ADSC регистра
ADCSRA.
Существует два режима работы АЦП:
- режим одиночного преобразования, когда запуск каждого преобразования инициируется пользователем;
- |
режим |
непрерывного |
преобразования, |
когда |
запуск |
преобразований |
||||||
выполняется непрерывно через определенные интервалы времени. |
|
|
|
|
|
|
||||||
Режим работы АЦП определяется состоянием разряда |
ADFR. |
Если |
он |
|||||||||
установлен в «1», АЦП работает в режиме непрерывного |
преобразования. |
В |
этом |
|||||||||
режиме |
запуск |
|
каждого |
следующего |
|
преобразования |
|
осуществляется |
||||
автоматически после окончания текущего. Если же разряд |
ADFR |
|
сброшен |
в |
«0», |
|||||||
АЦП |
работает |
в |
режиме |
одиночного |
преобразования |
и |
|
запуск |
|
каждого |
||
преобразования осуществляется |
по команде |
пользователя. |
Количество |
внутренних |
||||||||
циклов АЦП для преобразования входного сигнала в режиме однократного запуска
составляет 25 циклов для |
первого преобразования, 14 |
- для всех последующих, и |
14 - для работы в режиме непрерывного преобразования. |
|
|
Тактирование работы |
внутреннего цикла АЦП |
осуществляется от тактового |
генератора микроконтроллера через предделитель. Частота работы АЦП задается
коэффициентом |
деления |
предделителя |
и |
определяется |
состоянием |
разрядов |
|
ADPS2..ADPS0 регистра ADCSRA. Варианты задания коэффициента предделителя |
|||||||
приведены в табл. 5. |
|
|
|
|
|
|
|
Табл. 5. Задание коэффициента деления предделителя АЦП |
|
|
|||||
|
|
|
|
|
|
|
|
ADPS2 |
ADPS1 |
|
ADPS0 |
|
Коэффициент деления |
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
0 |
|
|
2 |
|
0 |
0 |
|
1 |
|
|
2 |
|
0 |
1 |
|
0 |
|
|
4 |
|
0 |
1 |
|
1 |
|
|
8 |
|
1 |
0 |
|
0 |
|
|
16 |
|
1 |
0 |
|
1 |
|
|
32 |
|
1 |
1 |
|
0 |
|
|
64 |
|
1 |
1 |
|
1 |
|
|
128 |
|
Следует отметить, что от скорости преобразования АЦП зависит и точность
преобразования. |
|
Наибольшая точность |
преобразования достигается, если тактовая |
|||||||
частота |
модуля |
АЦП |
находится в диапазоне 50...200 кГц. Соответственно |
|||||||
коэффициент |
деления |
предделителя |
рекомендуется |
выбирать |
таким, |
чтобы |
||||
тактовая |
частота |
модуля |
АЦП |
находилась в |
указанном диапазоне. Если же |
|||||
точности |
преобразования |
меньше |
10 |
разрядов |
достаточно, можно использовать |
|||||
более высокую частоту, увеличивая тем самым частоту выборки. Для этой же цели
предназначен |
разряд |
ADCHM (бит 4) регистра SFIOR. При установке |
этого |
||||||
разряда |
скорость |
преобразования |
АЦП |
увеличивается. |
Однако |
при |
этом |
||
увеличивается и энергопотребление микроконтроллера. |
|
|
|
|
|||||
При работе с АЦП по прерываниям разрешение прерывания осуществляется |
|||||||||
установкой |
в |
«1» |
разряда ADIE регистра ADCSRA при |
установленном |
флаге I |
||||
(бит 7) |
регистра |
SREG. Как и флаги остальных прерываний, флаг |
ADIF |
||||||
сбрасывается |
аппаратно при запуске |
подпрограммы обработки прерывания |
от |
АЦП |
|||||
или программно записью в него логической «1». |
|
|
|
|
|
||||
50