

|
R |
|
Q |
R |
|
P |
|
Q |
|
P |
. |
|
rot A |
y |
i |
x |
j |
x |
k |
||||||
|
|
z |
|
|
z |
|
|
y |
|
|||
|
rot( A B) rot A rot B , |
. |
|
: |
— |
||
. |
|
|
|
, |
( |
, |
|
) |
|
|
. |
16.2. |
. |
|
|
( A, dr ) |
A |
|
2- |
|
|
L . |
|
L |
|
|
|
A |
|
|
|
, |
L |
– |
- |
, |
|
|
|
- |
|
|
, |
L : |
|
|
|
( A, dr ) (rot A, n)d ( |
|
|
). |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. 16.1 |
|
|
|
n , |
|
|
|
|
|
L |
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
( |
. 16.1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
( |
|
. . |
14.3) |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
Q |
|
P |
|
R |
|
Q |
|
P |
|
|
|
Pdx Qdy Rdz |
y |
cos |
z |
cos |
x |
cos d |
. |
|||||||||
L |
|
|
|
z |
|
|
x |
|
|
y |
|
|
||||
|
cos , |
cos , |
|
cos – |
|
|
|
|
|
|
|
|
n |
|||
|
, |
|
|
|
|
|
|
|
L , |
P , |
Q |
R |
– |
|
|
|
A .
101

16.3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
16.3.1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A yzi xzj (x y)k . |
||||||
|
. |
|
P yz , |
Q xz |
|
|
R x y . |
|
|
|||||||||||||||
rot A |
|
R |
Q |
|
x y |
|
xz 1 x , |
|
|
|||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
x |
y |
z |
y |
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|||
rot A |
|
P |
R |
|
|
yz |
|
|
|
x y y 1, |
|
|
|
|||||||||||
z |
|
|
|
|
|
|||||||||||||||||||
|
y |
z |
x |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
rot A |
|
Q |
P |
|
xz |
|
|
yz z z 0 . |
|
|
||||||||||||||
x |
|
|
|
|||||||||||||||||||||
|
z |
x |
y |
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
, rot A (x 1)i ( y 1) j . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
16.3.2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A {y2 , 2xy, 2 y} |
|
|
|
|
|
|
|
|
|
|
x 1, y cost , |
z sin t , |
|
|||||||||||
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
. |
|
|
|
|
|
|
y2 z2 1 |
|
|
x 1. |
|
|
|||||||||||||
|
|
|
L , |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n i . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
j |
|
k |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
: |
rot A |
|
|
|
|
|
|
2i , |
(rot A, n) 2 . |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
x |
|
y |
|
z |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
2xy |
2 y |
|
|
|
|
|||||
( A, dr )
L |
|
16.3.3.
L : x cost, y sin t, |
|
|
z 2(1 cost) |
t . |
|
. |
|
, |
, |
|
|
, |
t |
|
, |
(2)d 2S 2 , |
S – |
|
, |
. |
|
|
|
A (z y)i (x z) j ( y x)k |
|
||
, |
|
|
|
|
|
. |
|
x2 y2 1 |
, |
L — |
, |
|
z 2 2x . |
|
|
L ,
.
,
,
2x z 2 0
|
2 |
|
|
1 |
|
|
|||
, . . n |
|
|
|
, 0, |
|
|
|
. |
|
|
|
|
|
|
|
||||
5 |
5 |
||||||||
|
|
|
|
|
|||||
102
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
j |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
rot A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2i 2 j 2k . |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
x |
|
|
|
|
y |
|
z |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
z y |
x z |
y x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
(rot A, n) |
|
2 |
|
2 0 2 |
|
1 |
|
2 |
|
6 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
5 |
|
5 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
( A, dr ) (rot A, n)d |
|
6 |
|
d |
6S |
|
. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
z 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 y2 1, |
|
|
|
, |
|
|
|
||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2x z 2 0 |
z 0 |
|||||||
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
( A, dr ) 6 . |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: ( A,dr ) (z y)dx (x z)dy ( y x)dz |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
(2 2cost sin t)(sin t) (cost 2 2cost)cost (sin t cost) 2sin t |
dt |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
z y |
|
|
|
|
xt |
|
|
|
|
|
|
|
|
|
|
|
x z |
|
|
|
|
|
yt |
y x |
zt |
|
|
|
|||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
02 |
|
|
|
|
|
|
|
(2sin t 2cost 3)dt 2cost 2sin t 3t |
|
6 . |
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
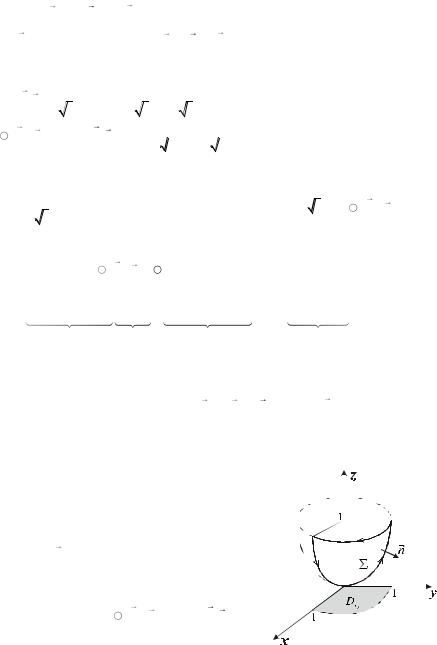
16.3.4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A y2i xyj (x2 y2 )k |
|
|
L , |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 y2 z |
x 0 , |
y 0 , |
z 1 |
|||||||||||||||
x 0 , |
|
y 0 . |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z . |
|
|
|
|
||
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
. 16.2). |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
, . . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
L , |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( A, dr ) (rot A, n)d |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. 16.2 |
|
|
|
103

|
|
i |
|
j |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
rot A |
|
|
|
|
|
|
2 yi 2xj yk . |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
x |
|
y |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
y2 |
|
xy |
x2 y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
. 13.1, |
|
|
|
|
, |
|
|
|
|
|
|
xOy . |
|
|
|
|
|
|
, |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
||||||||||
|
|
|
|
|
|
|
|
Dxy |
|
|
1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
z (x, y) x2 y2 , |
|
|
|
|
|
|
|
|
P 2 y , |
Q 2x , |
R y . |
, |
|||||||||||||||||||
|
, |
|
|
|
|
. |
13.1, |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
, |
|||||||
|
(rot A, n)d |
|
|
Oz , |
y |
|
|
|
|
|
( y 2 y 2x 2x 2 y)dxdy |
||||||||||||||||||||
|
|
|
x |
z ( x, y) |
|||||||||||||||||||||||||||
|
|
|
R P |
Q |
|
|
|
dxdy |
|
||||||||||||||||||||||
|
|
|
|
|
|
Dxy |
|
|
|
|
|
|
|
|
|
|
Dxy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/2 |
1 |
|
|
|
|
|
/2 |
1 |
|
|
|
|
/2 |
|
r |
3 |
|
1 |
|
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
ydxdy d r sin rdr |
sin d r |
dr cos |
|
0 |
|
|
|
|
|
|
|
|
. |
|
|||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
3 |
|
|
|
3 |
|
||||||||||||||||||||||||
|
Dxy |
|
0 |
|
0 |
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
0 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
, |
|
|
|
|
|
|
|
|
|
( A, dr ) |
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
L |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16.3.5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A yzi xzj (x y)k |
|
||||||||||||||
|
|
, |
|
x y 0. |
|
|
|
|
|
|
|
|
|
|
x2 y2 2z2 2 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
.
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
x2 y2 2z2 2 . |
||||
1 |
1 |
|
|
1 |
|
|||||
n |
|
|
; |
|
|
;0 |
cos |
|
|
, |
|
|
|
|
|
|
|||||
|
2 |
|
2 |
|
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
(rot |
x2 z2 |
1. |
|
|
, |
|
|
||||
|
|
|
|
xOz |
|
|
|
|
||
( A, dr ) x |
y |
2 d |
|
|
||
2 |
||||||
2 |
||||||
L |
|
|
|
|
||
|
2 |
1 |
|
|
|
|
( A, dr ) 2 d (r cos 1)rdr
|
|
16.3.1. |
|
|
|
|
|
, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x y 0 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x y 0 |
|||||
(rot A, n) x |
|
|
1 |
y 1 |
x y 2 . |
|||||||||||||||
|
|
|
||||||||||||||||||
|
|
|
2 |
2 |
|
|
|
|
2 |
|
|
|
||||||||
A, n) x |
y |
2 |
|
|
|
2(x |
|
1) |
|
|
|
|||||||||
|
|
|||||||||||||||||||
|
|
2(x 1) . |
||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
2 |
|
|
|
y x |
2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
y : x2 ( x)2 2z2 2 , |
|||||||||||||
1. |
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
(x 1) |
dxdz |
|
2 |
(x 1)dxdz . |
|||||||||||||||
cos |
|
|||||||||||||||||||
x2 z2 1 |
|
: |
x2 z2 1 |
|
|
|
|
|
|
|
|
|||||||||
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||
1 |
|
|
|
1 |
|
|
|
|
|
|||||||||||
2 |
cos d r 2dr 2 d rdr 2 . |
|||||||||||||||||||
L |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
|
0 |
2 |
1/2 |
104
16.4.
|
|
|
|
|
|
|
|
z |
|
x |
|
|
16.4.1. |
rot A , |
: |
) |
A z3i y3 j x3k ; |
) A |
y |
, |
, |
. |
|||
|
|
|
||||||||||
|
|
|
|
) |
|
z |
. |
x |
y |
|||
16.4.2. |
|
14.5.5 |
|
|
|
|
|
|
|
|||
16.4.3. |
|
|
|
|
A z2i x2 j y2k |
|
|
|||||
x2 y2 z2 1 |
|
|
|
x y z 1 |
|
|
|
|
|
|
|
|
|
|
|
|
n {1, 1, 1} . |
|
|
|
|
|
|
|
|
16.4.4. |
|
|
|
|
A {x,2z, y} |
|
|
|
|
|
||
x cost, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t . |
y 2sin t, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z 3cost - sin t 1, |
|
|
|
|
|
|
. |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
16.4.5. |
|
|
|
|
A 2xi 2zj yk |
|
|
|||||
ABOCDA , |
O (0, 0, 0) , |
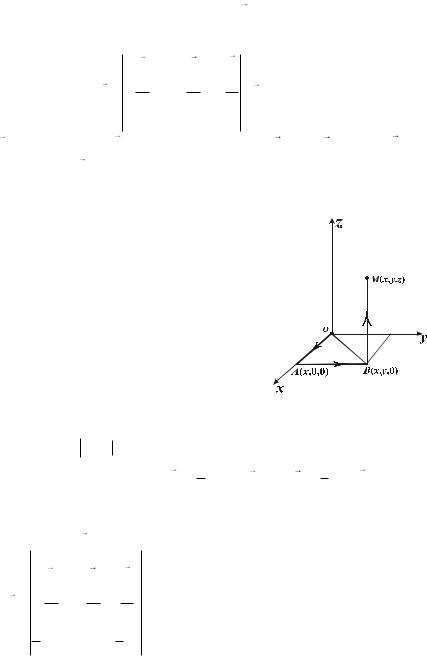
A (1, 0, 0) , B (1, 2, 0) , C (0, 2, 3) , D (0, 0, 3) — |
||||||||||
|
|
|
|
, |
. |
, |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
||
|
|
|
|
|
A (xz y)i yzj 2xyk |
|||||||
16.4.6. |
|
|
|
|
|
|||||||
, |
x 0 , y 0 |
z 5 |
x 0, y 0 . |
x2 y2 z2 16 0 |
||||||||
|
|
|
|
|
|
|
|
|||||
.
|
|
|
2 |
x |
2 |
|
|
x2 y2 |
|
16.4.1. |
) 3(z |
|
|
) j ; |
) |
|
|
||
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
xy |
|
16.4.4. |
6 . |
16.4.5. 3 . |
16.4.6. |
9 |
|||||
|
|||||||||
|
|
|
|
|
|
|
|
|
4 |
17.
17.1.
|
y2 |
z2 |
z2 x2 |
|
|
|
||||
|
|
|
|
|||||||
, |
|
|
|
, |
|
|
. 16.4.3. |
14 3 / 9 . |
||
yz |
2 |
zx |
2 |
|||||||
|
|
|
|
|
|
|
|
|||
.
17
|
|
|
|
|
|
f (M ) |
grad f , |
|
|
|
|
u f (x, y, z) |
: |
||
grad f |
|
f |
i |
f |
j |
f k . |
Д1Ж, 21.1.2. |
|
|
x |
|
y |
|
z |
|
105
|
|
|
|
|
|
|
|
|
f (x, y, z) |
|
|
|
|
|
. |
|
|
. |
|
( |
): |
|
|
|
|
|
|
|
|
|
||
|
|
|
, |
|
, |
|
. |
|
|
|
x |
y |
|
|
|
||||||
|
|
|
|
z |
, |
, |
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
. |
. |
, |
|
|
grad f |
f |
|
|
|
||||||
""
:(a b) (a) (b) .
,–
""
), |
, |
: (ab) a (ab) b (ab) .
,
b .
.
17.2.
A {P,Q, R}
|
|
|
|
, |
A : |
A grad |
, |
P |
|
|
|
|
|
x |
|
|
|
|
A : div A (, A) .
: rot A [, A] .
|
|
, |
, |
, |
|
|
|
||
a |
|
b – |
, |
|
|
. |
|
( |
|
|
|
|
|
|
|
" |
" |
a |
|
|
|
|
|
a |
|
|
|
, |
, |
|
|
|
|
|
|
, |
|
(x, y, z) , . . |
||
Q |
, R |
. |
|
y |
z |
|
, |
, |
A |
D , |
|
rot A 0 |
|
, |
: |
1) |
|
D ; |
L D |
|
2) |
|
|
- |
|
|
: |
( A, dr ) 0 ; |
|
|
|
|
L |
|
|
3) |
|
|
, |
M1 M 2 |
|
D , |
|
, |
|
M2
:( A, dr ) (M 2 ) (M1) .
M1
, |
- |
, |
: |
|
106 |

M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(M ) Pdx Qdy Rdz C |
. |
|
|
M 0 |
– |
|
|
|
|
|
|
|
|
||||||||||
M0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(x0 ; y0 ; z0 ) ; M (x, y, z) – |
|
|
|
|
|
|
|||||||
D ; |
C – |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
, |
|||
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
A {P,Q, R} |
|
|
|
|
, |
|
|
|
|
||||
Pdx Qdy Rdz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(x, y, z) . |
|
|
||||||
|
|
|
17.3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
A {P,Q, R} |
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
v : |
|
. |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
A rot v |
|
v(x, y, z) |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
A . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
, |
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
D , |
||
1) div A 0 |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
D ; |
|
|
|
|
|
|
|
|
|
|
|
D |
||||||
2) |
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|||
: ( A, n)d 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3) |
|
A |
|
|
|
|
|
- |
|
|
|
|
|
|
D |
||||||||
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
L , |
|
|
|
|
|
|
|
|
|
|
|
|
|
( . 16.1). |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
A |
|
|
|
: v1 v2 grad f , |
|
|
|
v2 – |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A . |
|
|
|
|
|
|
|
. |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
. |
|
|
, |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
vz |
0 , |
|
|
|
|
|
|
|
A rot v |
, |
|
|
|
|
|
, |
||||||
|
i |
|
j |
|
k |
|
|
|
|
vy |
|
|
|
|
|
vy |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Pi Qj Rk |
|
|
|
|
|
|
, |
|
|
P , |
v |
x Q , |
|
|
v |
x |
R . |
||||||
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
x |
|
||||||||
|
x |
|
y |
|
z |
|
|
|
|
|
|
z |
|
|
y |
|
|||||||
|
vx |
|
vy |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
, |
|
v v1 |
grad f , |
f – |
|
v1 |
|
|
|
|
|
A . |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
.
,
.
107
17.4. |
|
|
, |
17.4.1. |
: |
1) |
div( f A) ( A,grad f ) f div A ; |
2) rot( f A) [grad f , A] f rot A . |
|
|
|
. |
1) div( f A) ( f A) f ( f A) A ( f A) (A, f ) f (, A) |
||
( A,grad f ) f div A .
2) rot( f A) [, f A] [ f , f A] [A, f A] [ A, f ] f [, A]
[ A,grad f ] f rot A [grad f , A] f rot A . |
|
|
|
|
|
|
, |
||
|
|
|
|
|
|
|
. |
|
|
17.4.2. |
rot[r ,[c,r ]] , |
r {x, y, z} – |
|
|
|
|
|
(x, y, z) , |
|
c – |
. |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
[b,[a,c]] b(a,c) c(a,b) |
: |
|
|
|
|
|
|
|
|
rot[r ,[c,r ]] rot(c r2 r (c,r )) rot(c r2 ) rot(r (c,r )) . |
|
|
|
|
|
|
|||
|
2) |
17.4.1, |
|
rot(c r2 ) [grad r2 ,c] , |
|||||
rot(r (c,r )) [grad(c,r ),r ] (c,r ) rot r . |
|
|
|
|
|
|
|
||
grad r2 grad(x2 |
y2 z2 ) 2xi 2yj 2zk 2r , |
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
j |
|
k |
|
|
|
|
|
|
|
|
|||
grad(c, r ) grad(cx x cy y cz z) cxi cy j czk c , |
rot r |
|
|
|
|
|
0 . |
||
x |
|
y |
|
z |
|||||
|
|
|
|
|
|
|
|||
|
|
|
|
x |
|
y |
|
z |
|
|
|
|
|
|
|
|
|
|
|
rot[r ,[c,r ]] [2r,c] [c,r ] 3[r,c] .
17.4.3., rot rot A grad div A 2 A .
|
. |
|
|
|
|
|
|
|
|
|
|
( . |
|
|||
17.4.2), |
|
|
|
|
|
|
|
|
|
|
rot rot A [,[A]] (, A) (,) A div A 2 A . |
|||||
|
|
|
|
|
|
|
|
|
|
|
grad div A , |
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
. |
. . |
( |
|
), |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
2 |
|
|
2 |
. |
|
|
|
|
, |
|
|
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
||||
|
|
x |
|
|
y |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
. |
|
||
|
|
|
|
|
|
|
|
|
. |
|
rot rot A grad div A A |
|
||||
108
17.4.4. |
|
, |
|
|
|
|
|
|
A {2xy z, x2 2y, x} |
||||
|
. |
, |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
j |
|
k |
|
|
|
|
|
|
|
rot A |
|
|
|
|
|
i (x) y |
(x2 2 y)z |
||||
|
|
|
|
|
x |
y |
|
z |
|
|
|
|
|
|
|
|
|
2xy z |
x2 2 y |
x |
|
|
|
|
|||
j ((x) (2xy z) ) k ((x2 2 y) (2xy z) ) 0 i (1 1) j (2x 2x)k 0 . |
|||||||||||||
|
x |
z |
|
|
|
x |
|
|
y |
|
|
|
|
|
, |
A |
|
|
. 17.2, |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M 0 |
|
||
|
|
|
|
|
, |
|
|
|
|
|
|
O |
M (x, y, z) , |
|
|
|
OABM |
|
|
|
|
, |
|
|
|
||
|
|
|
|
|
|
|
( |
|
. 17.1). |
|
|
|
|
|
(M ) Pdx Qdy Rdz C , |
|
|
|
|
||||||||
|
|
OA |
|
AB |
|
BM |
|
|
|
|
|
|
|
|
|
|
OA y z 0 , |
(dx 0) , |
|
|
|
|
|||||
AB |
|
x |
|
|
|
|
|
|
|
|
|||
z 0 , |
|
|
BM |
|
|
|
|
|
|
|
|
|
|
|
x |
y |
(dx dy 0) . |
|
|
, |
|
|
|
|
|||
|
OA |
|
|
P 2xy z |
|
|
|
, |
|
|
|
||
. . |
y z 0 . |
|
|
|
|
, |
|
|
|
|
|
|
|
|
y |
|
z |
|
|
|
|
|
|
|
|
|
|
(M ) (x2 2 y)dy xdz C . |
|
|
|
|
|
|
. 17.1 |
||||||
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
(M ) x2 y y2 y xz z |
C x2 y y2 xz C . |
|
|
|
|||||||||
|
|
0 |
0 |
|
|
|
|
|
|
|
|
x |
|
17.4.5. |
|
, |
|
|
|
y |
|
i |
ln x |
||||
|
|
|
|
A |
|
ln z |
j |
1 k |
|||||
|
|
|
|
|
|
x |
|
|
|
|
z |
|
|
|
|
, |
M1(2, 2, 2) . |
|
|
|
|
|
|
, |
|||
|
M0 (1, 0, 1) |
|
|
|
|
|
|
|
|||||
|
. |
A |
|
|
|
|
|
|
x 0 , |
z 0 . |
|
||
|
i |
j |
|
k |
|
|
|
|
|
|
|
|
|
rot A |
|
|
|
|
0 |
, |
|
|
|
|
, |
|
|
x |
y |
|
z |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
y ln z |
ln x |
x 1 |
|
|
|
|
|
|
|
|
||
|
x |
. |
z |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
109 |
|
|
|
|
|
|
|
P |
y |
ln z |
, |
x |
|
|||
|
x |
|
||
F( y, z) –
""
y
y |
|
|
|
|
|
|
ln z dx y ln x |
x ln z F ( y, z) , |
|
|
||||
x |
|
z , |
|
|
|
|
y |
|
|
|
|
|
x . |
|
Q ln x , |
, |
|
|
|
(x, y, z) , |
|
|
y ln x x ln z F ( y, z) ln x , |
|
F 0 , . . |
||||||||
|
y |
|
|||||||||||
|
|
|
|
|
|
|
y |
|
|||||
F( y, z) G(z) . |
G(z) |
|
|
|
R |
x |
1 |
|
|||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
z |
|
z |
|
|
|
|
|
x |
1, . |
. |
|
1, |
G(z) z C . |
, |
||||
|
|
|
|||||||||||
y ln x x ln z G(z) z |
|
z |
Gz |
||||||||||
y ln x x ln z z C , |
|
|
C – |
|
|
|
|
. |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
M 0 M1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
M1 |
|
(2, 2,2) |
( A, dr ) (M1) (M0 ) y ln x x ln z z |
|
|
|
||
|
(1,0,1) |
|
|
||
M0 |
|
|
2ln 2 2ln 2 2 1 1 .
17.4.6. |
|
, |
|
|
|
|
|
A {x2 , y2 , xy 2xz 2 yz} |
|
||||||||
|
, |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|||
|
. div A |
(x2 ) |
( y2 ) |
(xy 2xz 2 yz) 2x 2 y 2x 2 y 0 , |
|||||||||||||
|
|
|
|
|
|||||||||||||
|
|
x |
y |
z |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
vy |
|
. |
|
|
|
v |
, |
|
||
. 17.3, |
|
vz 0 , |
|
|
|
P x2 |
, |
x Q y2 |
, |
||||||||
|
|
|
|
z |
|
|
|||||||||||
vy x2 z F1(x, y) , |
|
|
|
|
|
|
|
|
|
|
z |
|
|||||
vx y2 z F2 (x, y) , |
F1(x, y) |
|
F2 (x, y) – |
|
|||||||||||||
|
. |
|
|
|
|
|
|
|
|
|
vy |
|
|
v |
x R xy 2xz 2 yz , |
||
|
|
|
|
|
|
|
|
|
|
x |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|||
, |
F1 2 yz |
F2 xy 2xz 2 yz . |
|
|
|
|
|
|
vy |
vx , |
|||||||
2xz |
|
|
|
|
|
|
F2 (x, y) 0 , |
||||||||||
|
x |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
x2 y |
|
|
|
1 |
xy , |
|
|
F1(x, y) |
|
. |
|||||
|
|
|
|
2 |
||||||||
|
x |
|
|
|
|
y |
|
|
|
|||
|
|
|
2 |
|
|
2 |
|
|
|
|||
|
v y |
|
z i |
x |
|
|
|
z |
j grad f |
|||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
17.4.7. |
|
|
, |
|
|
A , |
||||||
|
|
|
|
. |
|
|
|
|
, |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
||
A graddiv A rot rot A .
,
, |
f (x, y, z) – |
. |
,
A 0 .
17.4.3, ,
( |
), |
110