

2 ,4 Расчет сопротивлений пусковых резисторов для асинхронного двигателя.
1. Считая, что Мп= I2пнаходим ток ротора при торможении противовключением

3. Сопротивление тормозной секции, включенной последовательно с пусковым резистором
![]()
4, Определяем сопротивление тормозной секции противовключения zп= mg му= 0,144*45= 6,47Ом. Сравнивая результаты аналитического и графического методов (пункты 3 и 6), убеждаемся, что они достаточно близки.
Режим рекуперативного торможения.
1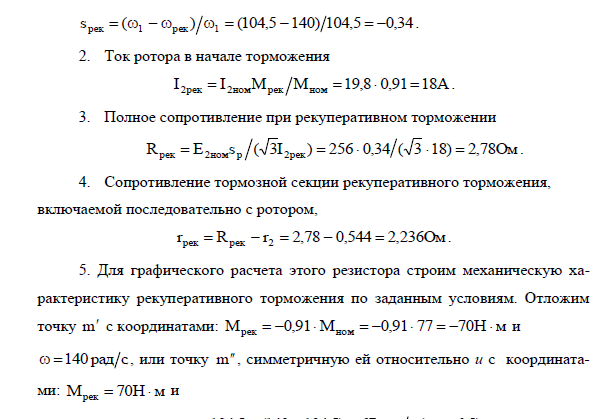 .
Скольжение при рекуперативном торможении
.
Скольжение при рекуперативном торможении
2,5 Переходные режимы при нелинейной совместной характеристике
 Если
механическая характеристика двигателя
или механизма нелинейна, то и совместная
характеристика также получается
нелинейной. Прежде чем приступить к
расчету переходного процесса, следует
разделить совместную характеристику
на отдельные участки такой длины, чтобы
можно было пренебречь их кривизной и
считать их прямолинейными.
Если
механическая характеристика двигателя
или механизма нелинейна, то и совместная
характеристика также получается
нелинейной. Прежде чем приступить к
расчету переходного процесса, следует
разделить совместную характеристику
на отдельные участки такой длины, чтобы
можно было пренебречь их кривизной и
считать их прямолинейными.
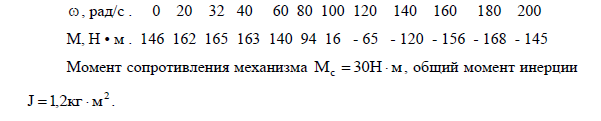
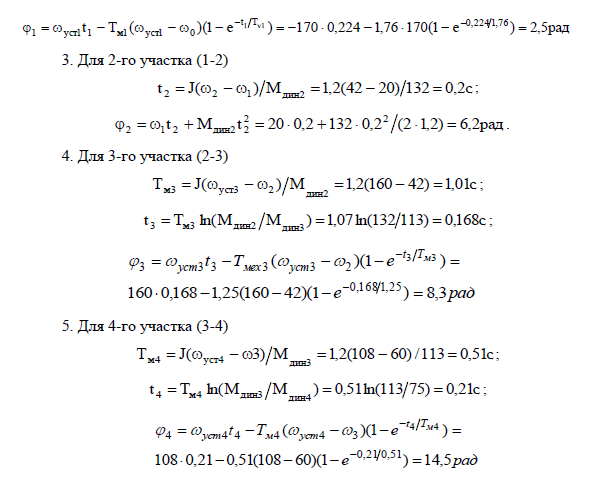
Строим совместную характеристику (рис. 2.3) по формуле М дин=М-Мс и разбиваем ее на отдельные участки: ω1=20 рад с, ω2=42рад с, ω3= 60рад с, ω4=76 рад с, ω уст =95рад с,
 Метод
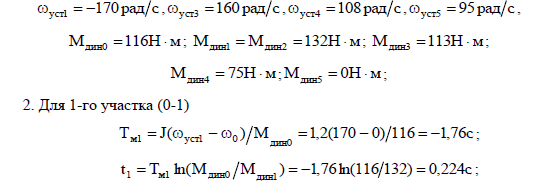
линеаризации. 1. Через начало и конец
каждого участка проведем прямую до
пересечения с вертикальной осью. Получим
установившиеся угловые скорости участков
и соответственно динамические моменты:
Метод
линеаризации. 1. Через начало и конец
каждого участка проведем прямую до
пересечения с вертикальной осью. Получим
установившиеся угловые скорости участков
и соответственно динамические моменты:
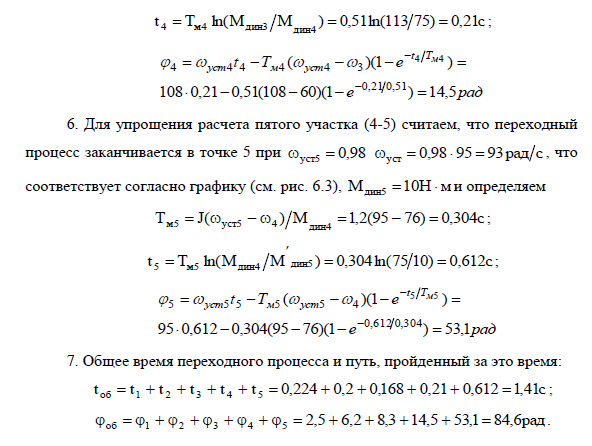
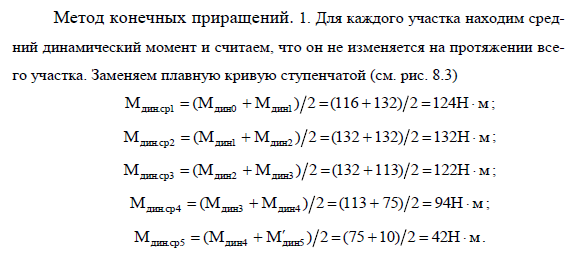
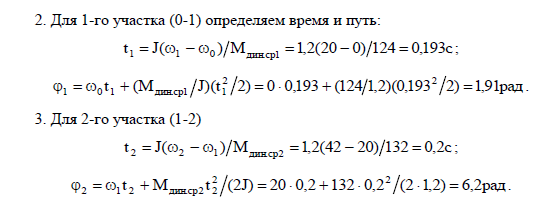
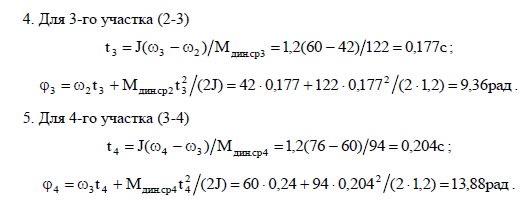
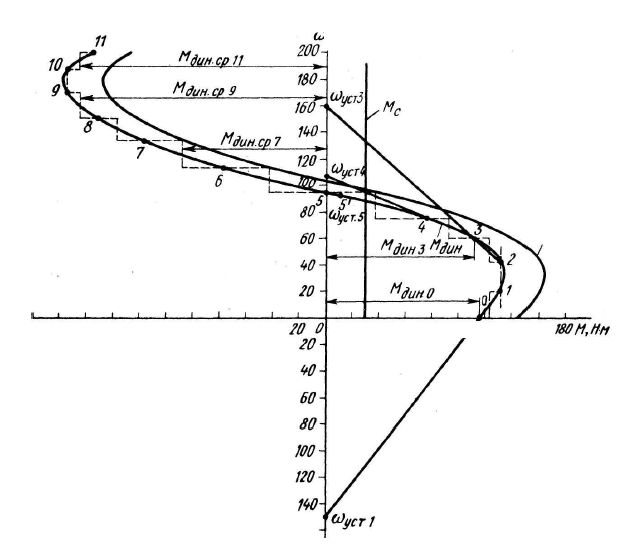
 рис.
2.3 Совместная характеристика для расчета
переходных процессов
рис.
2.3 Совместная характеристика для расчета
переходных процессов
3 Частотный преобразователь
Частотный преобразователь, или преобразователь частоты - электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя.
Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты - полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь - это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.
Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
Современные электроприводы должны отвечать различным требованиям таким как:
максимальный КПД;
широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения;
быстрое удаление ошибок при изменении управляющих сигналов и/или помех;
максимальное использование мощности двигателя во время сниженного напряжения или тока;
надежность, интуитивное управление.