

Лабораторная работа № 10
ИЗУЧЕНИЕ КОЛЕБАНИЙ ФИЗИЧЕСКОГО МАЯТНИКА
Цель работы изучение колебаний физического оборотного маятника, определение ускорения свободного падения с помощью оборотного маятника.
|
2. Теоретические основы работы |
|
|||||||||
изическим маятником называется твердое тело, которое может со- |
|||||||||||
О |
|
вершать колебания относительно неподвиж- |
|||||||||
Ф |
|
||||||||||
|
ной горизонтальной оси. Рассмотрим тело |
||||||||||
|
массой m (рис. 1), подвешенное на горизон- |
||||||||||
и |
тальной оси, проходящей через точку О (точ- |
||||||||||
ка подвеса). Если повернуть тело на угол от |
|||||||||||
Я |
положения равновесия, то сила тяжести со- |
||||||||||
здаст вращающий момент, проекция которо- |
|||||||||||
|
|
го на ось z, совпадающей с осью вращения, |
|||||||||
|
|
будет выражаться соотношением |
|
||||||||
С |
|
M z (mg) mgl sinφ, |
(1) |
||||||||
|
Н |
|
|
|
|||||||
где l — расстояние от точки подвеса (точка О) до положения центра масс |
|||||||||||
тела (точка С). Знак “минус” в выражении (1) показывает, что возникший |
|||||||||||
вращающий момент направленИпротив углового перемещения тела и |
|||||||||||
стремится вернуть систему к положению равновесия. |
|
||||||||||
Движение физического маятника |
относительно |
|
горизонтальной |
оси, |
|||||||
|
|
|
|
|
|
|
|
У |
|
|
|
проходящей через точку О описывается основным уравнением динамики |
|||||||||||
вращательного движения |
|
Izεz Mz (mg), |
|
|
|
||||||
|
|
|
|
|
|
||||||
которое, с учетом (1) принимает вид |
М |
|
|||||||||
|
|
Э |
|
||||||||
|
|
|
Iz z |
mgl sin , |
|
(2) |
|||||
где Iz — момент инерции тела относительно оси z, |
εz — угловое ускоре- |
||||||||||
ние в данный момент времени. |
|
|
|
|
|
|
И |
||||
|
|
|
|
|
|
|
|
||||
|
d2 |
|
|
|
|
|
|
|
|
|
|
Поскольку z |
dt2 и при малых углах sin , то можно записать |
||||||||||
|
|
|
|
d2 |
|
|
|
|
|||
|
|
Iz |
|
|
|
mgl 0 |
|
|
|
||
|
|
dt |
2 |
|
|
|
|||||
или в стандартной форме |
|
|
|
|
|
|
|
|
|||
|
d2 |
|
|
|
|
|
|
|
|||
|
|
|
|
2 0, |
|
|
(3) |
||||
|
|
|
|
|
|
||||||
|
|
|
dt2 |
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
где
2 mgl .
0 Iz
Уравнение (3) является дифференциальным уравнением собственных колебаний физического маятника. Решением уравнения (3) является гармоническая функция
(t) m cos( 0t ), |
(4) |
О |
|
|
|
|
|
mgl — собственная частота не- |
|||||
где m — амплитуда колебаний; 0 |
|||||||||||
Ф |
|
|
|
|
|
I z |
|
|
|
|
|
затухающих колебаний; — начальная фаза колебаний. |
|
|
|
|
|||||||
Поскольку пер од колебаний связан с циклической частотой 0 |
соот- |
||||||||||
ношением |
|
|
|
|
|
|
|
|
|
|
|
и |
|
T |
2 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Я |
|
0 |
|
|
|
|
|
|
|||
то для периода колебаний физического маятника получаем |
|
|
|
|
|||||||
С |
Iz |
. |
|
|
|
|
(5) |
||||
|
|
T 2 |
|
|
|
|
|
||||
|
|
|
mgl |
|
|
|
|
|
|
||
|
|
Частным случаем физического маятни- |
|||||||||
|
|
ка является математический маятник, вся |
|||||||||
|
Нмасса которого сосредоточена фактиче- |
||||||||||
|
|
И |
|
|
|
|
|
||||
|
|
ски в точке и подвешена на достаточно |
|||||||||
|
|
длинной нити. Момент инерции матери- |
|||||||||
|
|
|
У |
|
|
|
|
|
|||
|
|
альной точки относительно оси опреде- |
|||||||||
|
|
ляется выражением |
Iz ml2. |
|
|||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
М |
(6) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя (6) в (5) получаем выраже- |
|||||||||
|
|
|
|
|
|
|
Э |
|
|||
|
|
нием для периода колебаний математиче- |
|||||||||
|
|
ского маятника Тм |
|
И |
|||||||
|
|
|
|
|
|
Тм 2π |
|
lм |
, |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
(7) |
|
|
где l — длина математического маятника. |
|||||||||
|
|
Приведенной длиной физического ма- |
|||||||||
Рис. 2. Оборотный |
ятника lпр называют длину такого мате- |
|||||
матического маятника, период колебаний |
||||||
маятник |
||||||
которого равен периоду колебаний физи- |
||||||
|
||||||
ческого маятника. Из равенства периодов колебаний (5) и (7) получаем |
|
|||||
|
l |
|
Iz |
, |
(8) |
|
|
|
|||||
|
пр |
|
ml |
|
||
где Iz — момент инерции физического маятника относительно оси под-
веса, m — масса маятника, l — расстояние от точки подвеса до центра масс физического маятника.
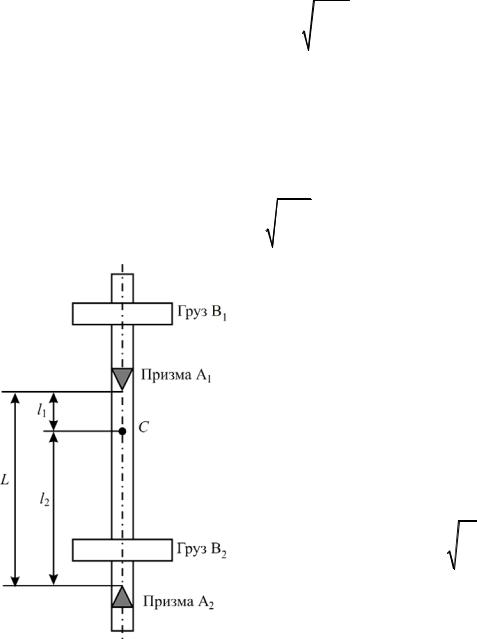
Используемый в данной работе физический маятник представляет собой стальной стержень (рис. 2), на котором закрепляются опорные стальные призмы (А1, А2) и стальные грузы (В1, В2). Такой маятник называется оборотным, поскольку может совершать колебания, опираясь на опору как призмой А1 (в прямом положении), так и призмой А2 (в перевернутом положении).
ОНа рис. 2 обозначены: L — расстояние между ребрами опорных призм, l1 и l2 — расстояния от ребер соответствующих призм (точек подвеса) до центра масс системы (точка С).
Маятник, подвешенный на опоре А1 будет совершать колебания с пери- |
|||||||||||||||||||||
одомФ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
Т 2 |
|
|
|
Iz1 |
|
|
, |
|
|
|
|
(9) |
|||||||
|
|
mgl |
|
|
|
|
|||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
а подвешенныйЯна опоре А2 — с периодом1 |
|
|
|
|
|||||||||||||||||
С |
|
|
|
|
|
|
|
Iz |
2 |
|
|
|
|
|
|||||||
|
|
|
Т2 2 |
|
|
|
|
|
. |
|
|
(10) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
mgl2 |
|
|
|
|
|||||
Оборотный маятник позволяетНдостаточно точно провести опытное |
|||||||||||||||||||||
|
|
|
И |
|
|
|
|||||||||||||||
определение ускорения свободного падения. Перемещением одной из |
|||||||||||||||||||||
опорных призм маятника (например, |
|
|
А1) находят такое расположение |
||||||||||||||||||
|
|
|
|
|
|
|
|
У |
|
|
|||||||||||
призм, при котором периоды колебаний маятника, подвешенного как на |
|||||||||||||||||||||
призме А1, так и на призме А2, оказываются равными |
|
|
|||||||||||||||||||
Из (9) и (10) следует, что |
|
Т1 Т2 |
|
Т0. |
М |
(11) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Iz |
|
|
|
Iz |
|
|
|
|
|
|
|
|
|
Э |
|
||||
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|||||||
|
|
|
|
l |
l |
|
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
И |
||||
Используя теорему Гюйгенса-Штейнера, получаем |
|||||||||||||||||||||
|
I |
c |
mgl |
2 |
|
|
|
|
|
I |
c |
mgl2 |
|||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
, |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
|
|
|||||||
откуда |
|
l1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Ic ml1l2. |
|
|
(12) |
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
Подставив (12) в (9), (10), с учетом (11) получаем
|
|
Iz |
|
|
ml l |
ml2 |
|
|
|
Iz |
2 |
|
|
ml l |
ml2 |
|
l |
l |
|
Т |
2 |
1 |
|
2 |
1 2 |
1 |
Т |
2 |
2 |
|
|
2 |
1 2 |
2 |
2 |
1 |
2 |
. |
|
|
|
|
|
|
|
||||||||||||||
1 |
|
mgl1 |
mgl1 |
|
|
mgl2 |
|
|
mgl2 |
|
|
g |
|||||||
|
|
|
|
|
|
|
|
|
|||||||||||
Тогда период колебаний маятника Т0 оказывается равным |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
Т0 2 |
l1 l2 |
. |
|
|
(13) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
Т1 |
Как следует из (13), при |
найденном |
положении призмы |
А1 (когда |
|||||||||||||||
Т2 Т0) расстояние между опорными призмами L = l1 + l2 оказывает- |
|||||||||||||||||||
Ося равным приведенной длине физического маятника lпр. Точка К (рис. 1), |
|||||||||||||||||||
Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
лежащая на л н и, соединяющей точку подвеса О с центром масс С на |
|||||||||||||||||||
расстоянии |
lпр от точки подвеса О, называется центром качания. Точка |
||||||||||||||||||
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
подвеса |
точка качания обладают свойством взаимности: если маятник |
||||||||||||||||||
подвесить так, чтобы ось подвеса прошла через точку К, то точка О ока- |
|||||||||||||||||||
|
|
Я |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
жется центром качания, а период колебаний маятника останется преж- |
|||||||||||||||||||
ним.
Ускорение свободного падения рассчитывается по соотношению (14): |
|||
С g |
4 2L |
, |
(14) |
T2 |
|||
|
0 |
|
|
где Т0 определяется по результатам графической обработки эксперимен- |
|
тальных данных, |
L – расстояниеНмежду опорными призмами, которое в |
случае Т1 = Т2 = Т0 |
оказывается равным lпр. |
|
У |
|
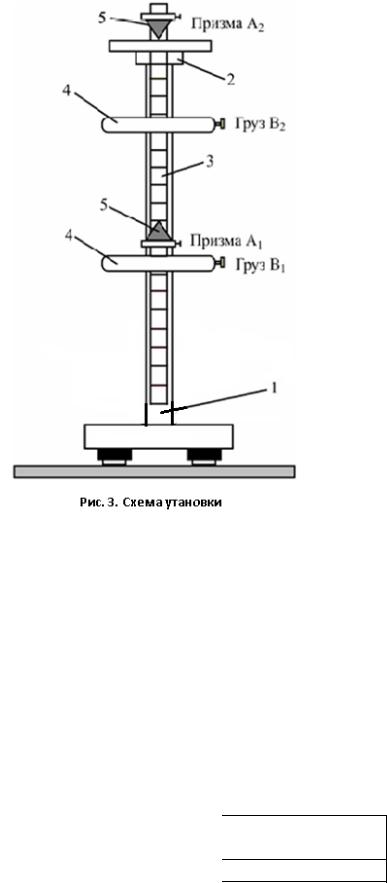
3. ОписаниеИсхемы установки |
Схема установки представлена на рис. 3. На вертикальной стойке 1 за-
креплен кронштейн 2, с опорой, на которую подвешивается маятник. Фи-
двумя грузами 4. Маятник подвешивается наМопору с помощью опорных призм 5. Грузы и опорные призмы можно перемещать и фиксировать по всей длине стержня. Стержень имеет проточки нанесенныйЭс шагом 10
зический оборотный маятник представляет собой стальной стержень 3 с
мм. Толщина грузов 20 мм, высота призм – 30 мм. Винты фиксации гру- И
зов находятся строго посередине, что облегчает определение их положения на стержне.
О Фи Я С Н И
секундомер с разрешением не хужеУ0,2 с;
линейка с миллиметровой шкалой.
Взависимости от конструкции установкиМвозможно использование автоматической системы измерения времени электронными средствами.
Всостав системы входят фотоэлектрический датчикЭперемещения и электронный секундомер, позволяющие производить отсчет времени заданного числа периодов колебаний N. И
1.Заполните табл. 1.4. Порядок выполнения работы
Спецификация измерительных приборов
Название при- |
Предел |
Цена |
Инструментальная |
бора и его тип |
измерения |
деления |
погрешность |
|
|
|
|
2. Расположите грузы и призмы на стержне маятника согласно указаниям на установке.
3.Определите не менее пяти раз период колебаний маятника при его
качании на призме А2, руководствуясь указаниями на установке. Результаты экспериментов запишите табл. 2.
4.Определите зависимость периода колебаний маятника от расстоя-
ния L между призмами при его качании на призме А1, перемещая призму А1 вдоль стержня с шагом 10 мм в соответствии с проточками на стержне (не менее пяти шагов). Направление перемещения призмы согласуйте с преподавателем. Результаты экспериментов запишите в табл. 2.
О |
|
|
|
|
|
|
Таблица 2 |
|
|||
|
|
|
|
|
|
|
|
|
|||
Ф |
Определение периода колебаний маятника |
|
|||||||||
|
|
|
|
|
|
|
|
||||
|
№ |
|
Призма 2 |
|
Призма 1 |
|
|
||||
|
опы |
|
|
|
L= ,м |
L= ,м |
L= ,м |
L= ,м |
L= ,м |
|
|
|
и |
|
|
|
|
|
|
|
|||
|
та |
|
T2, с |
|
|
Т1, с |
|
|
|||
|
1 |
Я |
|
|
|
|
|
|
|
||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
С |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|||||
|
|
|
|
4. Обработка результатов измерений |
|
||||||
1. По данным табл.1 рассчитайте средние значения периода колебаний |
|||||||||||
маятника Т1 |
для каждого значения расстояния между призмами. |
|
|||||||||
|
|
|
|
|
|
У |
|
||||
2. Постройте график зависимостиИпериода колебаний маятника Т1 |
от |
||||||||||
расстояния L между призмами. |
|
|
|
|
|
|
|||||
3. По данным табл.1 рассчитайте среднее значение периода колебаний |
|||||||||||
маятника Т2.
4. Определите по графику приведенную длину маятника lпр (найдя зна- |
|
чение L, при котором Т1 Т2 Т0 ). |
М |
5.Рассчитайте значение ускорения свободного падения по формуле
(14).
6.Рассчитайте абсолютную погрешность экспериментального определения ускорения свободного падения: ЭИ
|
|
T |
2 |
|
lпр |
2 |
|
g g |
4 |
о |
|
|
|
. |
|
T |
l |
||||||
|
|
|
|
|
|||
|
|
о |
|
|
пр |
|
7. Запишите окончательный результат в стандартной форме.
|
|
|
5. Контрольные вопросы |
|
1. |
Сформулируйте определения физического и математического маят- |
|||
ников. |
|
|
|
|
2. |
Дайте определение понятиям приведенная длина физического маят- |
|||
ника, центр подвеса и центр качаний маятника. |
||||
3. |
Запишите основное уравнение динамики вращательного движения |
|||
для физического маятника и объясните смысл входящих в него величин. |
||||
4. |
Запишите дифференциальное уравнение малых колебаний маятника. |
|||
О |
|
|
|
|
5. |
Выведите формулу периода колебаний физического маятника. |
|||
6. |
Какой |
маятник называют оборотным? Какие характеристики обо- |
||
ротного маятника Вам известны? |
||||
7. |
Вывед те формулу для определения приведенной длины физическо- |
|||
|
определение |
|
||
гоФмаятника. |
|
понятию “математический маятник“ как частно- |
||
8. |
Дайте |
|
|
|
|
|
Я |
||
му случаю ф з ческого маятника. Выведите формулу для периода коле- |
||||
баний математ ческого маятника. |
||||
|
|
С |
||
|
|
|
|
Рекомендуемая литература |
1. |
Савельев И.В. Курс общей физики: Учебное пособие. В 3-х тт. Т.1. |
|||
|
|
|
|
Н |
Механика. Молекулярная физика. 5-е изд., стер. — СПб.: Изд-во «Лань». |
||||
2006 г. С. 181 — 197. |
|
|
||
2. |
Д.А. Иванов, И.В. Иванова, А. . Седов, А.В. Славов. Механика. Мо- |
|||
лекулярная физика и термодинамика: Конспект лекций/ Под ред. А.В. |
||||
|
|
|
|
У |
Кириченко. — М.: ИздательствоМЭИ. 2003. С.69 — 71. |
||||
|
|
|
|
М |
|
|
|
|
Э |
|
|
|
|
И |