

1.2 Примеры систем управления Технические системы управления
Система автоматического управления температурой в печи

Система
автоматического управления температурой
печи:
![]() — задающее воздействие;
— задающее воздействие;![]() — управляемый параметр (температура)
— управляемый параметр (температура)
Управляемый параметр - температура в печи 1 должна изменяться во времени согласно заданному закону, определяемому программным устройством 2, которое перемещается по горизонтали. По его рельефной поверхности катится ролик 3, который передает перемещение рычагу 4, вращающемуся вокруг оси 5. В вертикальной прорези рычага 4 помещена стрелка 6, связанная с самопишущим потенциометром 7. Она показывает температуру и одновременно при касании с контактом рычага 4 замыкает цепь исполнительного двигателя 8, который открывает или закрывает входной клапан печи, через который поступает в печь теплоноситель.
Следящая систему управления орудийной башней
В ряде случаев задающее воздействие представляет неизвестную случайную функцию. В этом случае САУ называют следящей системой. Приведём пример системы, в которой орудийная башня 1 отслеживает случайное положение задатчика 2.

Следящая система управления орудийной башней
При
изменении положения задатчика 2
возникает рассогласование
![]() моста3.
Напряжение с диагонали моста поступает
на усилитель 4,
который посредством электродвигателя
5
и редуктора 6
управляет положением башни и связанным
с ней — движком а
реостата 3.
Когда движок а
реостата 3
занимает одинаковое положение с движком
б
реостата-задатчика 2,
сигнал рассогласования
моста3.
Напряжение с диагонали моста поступает
на усилитель 4,
который посредством электродвигателя
5
и редуктора 6
управляет положением башни и связанным
с ней — движком а
реостата 3.
Когда движок а
реостата 3
занимает одинаковое положение с движком
б
реостата-задатчика 2,
сигнал рассогласования
![]() и следящая система приходит в установившееся
состояние.
и следящая система приходит в установившееся
состояние.
Система автоматического управления уровнем жидкости

Принципиальная схема системы автоматического регулирования уровня жидкости:
П - привод; РК - регулируемый клапан; РМ - расходомер;
УМ - уровнемер; БИК - блок извлечения корня
Уровень
жидкости
![]() зависит от разности двух величин —
притока
зависит от разности двух величин —
притока![]() и
расхода
и
расхода
![]() Если
Если![]() то уровень растет, и наоборот, при
то уровень растет, и наоборот, при![]() —
—![]() уменьшается.
Величину притока
уменьшается.
Величину притока
![]() можно менять посредством регулирующего
клапана РК, который управляется
электроприводом П.Сигнал, соответствующий
действительному уровню
можно менять посредством регулирующего
клапана РК, который управляется
электроприводом П.Сигнал, соответствующий
действительному уровню![]() измеряется уровнемером (УМ) и сравнивается
с требуемым уровнем
измеряется уровнемером (УМ) и сравнивается
с требуемым уровнем![]() (уставкой). В зависимости от величины и
знака рассогласования
(уставкой). В зависимости от величины и
знака рассогласования![]() регулятор посредством электропривода
увеличивает, если
регулятор посредством электропривода
увеличивает, если![]() или уменьшает, если
или уменьшает, если![]() приток жидкости
приток жидкости![]() поддерживая равенство между
поддерживая равенство между
![]() и
и
![]() при заданном уровне
при заданном уровне
![]() Изменение расхода
Изменение расхода
![]() нарушает баланс в схеме. Поэтому
нарушает баланс в схеме. Поэтому
![]() является возмущающим сигналом. Для
повышения точности регулирования наряду
с
является возмущающим сигналом. Для
повышения точности регулирования наряду
с
![]() используется сигналы
используется сигналы
![]() и
и
![]() которые порождают местную обратную
связь. При использовании
которые порождают местную обратную
связь. При использовании![]() имеет
место так
называемое комбинированное
регулирование по отклонению и возмущению.
имеет
место так
называемое комбинированное
регулирование по отклонению и возмущению.
Выходной
сигнал некоторых расходомеров
пропорционален квадрату расхода
жидкости.
Поэтому цепи измерения расходов содержат
блоки извлечения корня (БИК). Воспользуемся
стандартными обозначениями:
![]() — вход системы (заданное воздействие),
— вход системы (заданное воздействие),![]() — выход системы (уровень жидкости),
— выход системы (уровень жидкости),![]() — возмущение (расход жидкости).
Функциональная схема САУ уровнем
жидкости может быть представлена в виде
— возмущение (расход жидкости).
Функциональная схема САУ уровнем
жидкости может быть представлена в виде
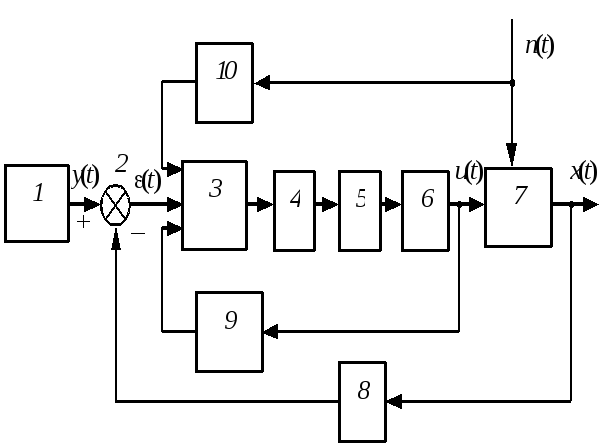
Функциональная схема САУ уровнем жидкости:
1 - задающее устройство; 2 - сравнивающее устройство: 3 - регулятор;
4 - усилитель мощности; 5 - привод; 6 - регулирующий орган (клапан);7 - объект управления; 8 — уровнемер; 9, 10 - линейные расходомеры