

Разомкнутая и замкнутая системы
Целенаправленное изменение поведения объекта во времени может осуществляться по разомкнутому и замкнутому циклам.
Система управления – это соединение отдельных элементов в определённую конфигурацию, обеспечивающую заданные характеристики. В основе её анализа лежит теория линейных систем, предполагающая наличие причинно-следственных связей между элементами. Процесс или объект управления может быть представлен в виде блока
![]()
Связь между входом и выходом - это преобразование одного сигнала (причины) в другой (следствие).
Система, в которой выходной сигнал не подаётся на управляющее устройство, называется разомкнутой.
В разомкнутой системе управления для получения желаемой реакции ОУ обычно используется исполнительное устройство (рис.1.1).
![]()
Рис.1.1 Разомкнутая система управления (без обратной связи)
Примером может служить разомкнутая система управления скоростью вращения диска, представленная на рис. 1.2. Во многих современных приборах используется диск, который должен вращаться с постоянной скоростью. В этой системе для задания напряжения, пропорционального желаемой скорости, использована батарея, затем это напряжение усиливается и подаётся на электродвигатель. Электродвигатель постоянного тока, скорость которого пропорционально приложенному напряжению, обеспечивает вращение диска.

Рис. 1.2 Разомкнутая система управления скоростью вращения диска
Система, в которой происходит измерение выходной переменной и сравнение её с заданным значением, называется замкнутой.
Измеренное значение выхода называют сигналом обратной связи.
Простейшая замкнутая система изображена на рис 1.3.
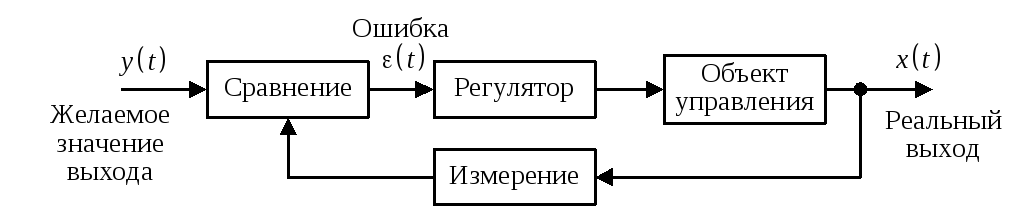
Рис.1.3 Замкнутая система управления (с обратной связью)
В замкнутой системе вычисляется разность (ошибка) между желаемым значением выходной переменной и её измеренным действительным значением.
На рис. 1.4 представлена замкнутая система управления скоростью вращения диска.
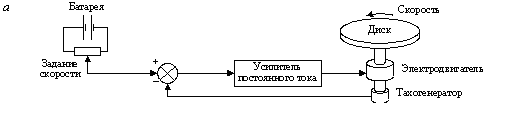
Рис. 1.4 Замкнутая система управления скоростью вращения диска
В уже имеющуюся систему необходимо ввести датчик, измеряющий скорость вращения вала двигателя, и устройство для сравнения заданной скорости вращения диска и действительной. Для этих целей удобно использование тахогенератора, выходное напряжение которого пропорционально скорости вращения вала двигателя. Сигнал ошибки образуется как разность между входным напряжением и напряжением тахогенератора. Замкнутая система всегда стремиться свести ошибку к минимуму.
Структурная и функциональная схемы.
При изображении САУ используют структурные и функциональные схемы.
Общая функциональная схема определяет назначение элементов и последовательность их соединения между собой. При составлении функциональной схемы система разбивается на звенья, исходя из выполняемых функций (назначения).
Для получения структурной схемы систему разбивают на возможно простые звенья направленного действия (исходя из удобства математического описания).
Звено направленного действия – это звено, передающее воздействие только в одном направлении со входа на выход, т.е. изменение состояния этого звена не влияет на состояние предшествующего звена, работающего на его вход.
Структурная схема – это схема, где каждой математической операции преобразования сигнала соответствует определённое звено. Структурная схема состоит из прямоугольников, изображающих звенья системы, и стрелок, соединяющих входы и выходы, стрелками показываются также внешние воздействия, приложенные к звеньям. Каждому звену структурной схемы соответствует описывающее его уравнение или характеристика. Получение структурной схемы является конечной целью математического описания системы.
В общем случае одной функциональной схеме может соответствовать несколько различных структурных схем системы в зависимости от полноты математического описания.
При описании САУ можно выделить типовую функциональную схему.
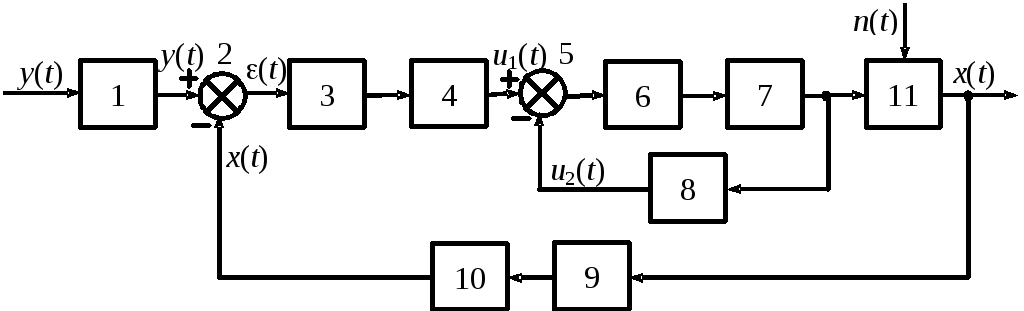
Рис. 1.5 Типовая функциональная схема САУ: 1 – задающее устройство; 2, 5 – сравнивающие устройства; 3 – преобразующее устройство;4, 8 – корректирующие устройства (регулятор); 6 – усилительное устройство; 7 – исполнительное устройство; 9 – чувствительные или измерительные элементы; 10 – элемент главной обратной связи; 11 – объект управления; f(t) – помеха
Функциональное назначение каждого из элементов типовой схемы состоит в следующем. Задающее устройство (1) преобразует входное воздействие в сигнал x(t), удобный для сравнения. Сравнивающее устройство (2) путем сравнения сигнала x(t) и регулируемой величины y(t) вырабатывает сигнал ошибки (t). Преобразующее устройство (3,10) служит для преобразования одной физической величины в другую, более удобную для использования в процессе управления. Корректирующее устройство (4,8) обеспечивают заданные динамические свойства замкнутой системы. Усилительное устройство (6) обеспечивает усиление мощности сигнала ошибки и управления. Исполнительное устройство (7), предназначено для воздействия на управляющий орган. Чувствительные или измерительные элементы (датчики) (9) необходимы для измерения информационных сигналов.
Рассмотрим функциональные схемы разомкнутой и замкнутой системы управления скоростью вращения диска (рис.1.6 и 1.7)

Рис. 1.6 Функциональная схема разомкнутой СУ скоростью вращения диска

Рис. 1.7 Функциональная схема замкнутой СУ скоростью вращения диска