

755
.pdfvС vB vСB ;
|
|
|
|
|
|
|
|
(3.3) |
|
|
|
|
|||||
vС vD vСD . |
. |
|||||||
|
|
|||||||
Линейная скорость точки B: |
|
|
||||||
vВ = 1lAB =150 · 0,1 = 15 м/с. |
(3.4) |
|||||||
Масштаб плана скоростей: |
|
|
||||||
v = pb /vВ = 37,5/15 = 2,5 мм/(м · с–1). |
(3.5) |
|||||||
План скоростей – векторный многоугольник для определения скоростей точек механизма.
Правило 2. Векторы линейных скоростей направлены перпендикулярно звеньям в сторону вращения.
Вектор pb (см. рис. 3.2, б) студент принимает самостоятельно из условия получения округленной величины масштаба. По данным примера откладываемpb=37,5 ммперпендикулярноAB в сторону вращения. Из его конца проводим направление vCB перпендикулярно CB. Из полюса p (так как vD = 0) проводим направление vCD, перпендикулярное CD, до пересечения с на-
правлением vCB. В искомую точку c проводим стрелки векто-
ров. Это следует из первого уравнения (3.3). Измеряем длины
векторов из |
плана и определяем значения скоростей: |
|
pc = 6 |
мм; vC = pc/ v = 6 /2,5 = 2,4 м/с; |
(3.6) |
bc = 35,5 мм; vCB = 35,5/2,5 = 14,2 м/с.
Правило 3. Для определения величины скорости длину отрезка на плане делят на масштаб.
Направления линейных скоростей определяют из построен-
ного векторного треугольника. На отрезках bc и pc находим положения точек s2 и s3 из свойства подобия планов:
bs2 = 0,4bc = 0,4·35,5 = 14 мм; ps3 = 0,3pc = 0,3·6 = 1,8 мм.
В общем случае по свойству подобия:
bs2 = bc· lBS2 / lBC; ds3 = cd· lDS3 / lCD. |
(3.7) |
Правило 4. Свойство подобия планов: каждой точке плана положений соответствует точка на плане скоростей; фигуры на планах положений и скоростей геометрически подобны и имеют взаимно перпендикулярные стороны.
31

Для определения направления векторов скоростей цент-
ров масс из полюса p проводим векторы в точки s2 и s3. Длины векторов, измеренные на плане, и скорости центров масс:
ps2 = 23,5 мм; vS2 = 23,5/2,5 = 9,4 м/с; ps3 = 1,8 мм; vS3 = 1,8/2,5 = 0,72 м/с.
Из вышеприведенных действий следует
Правило 5. Векторы, проведенные из полюса плана, изображают абсолютные скорости точек механизма; векторы, через полюс не проходящие, изображают относительные
скорости для данного положения механизма. |
|
||||||||
Угловые скорости звеньев: |
|
||||||||
= v |
CB |
/ l |
BС |
= 14,2/0,2 = –71 с–1; |
|
||||
2 |
|
|
|
|
= 2,4/0,3 = 8 с–1. |
|
|||
= v |
CD |
/ l |
CD |
(3.8) |
|||||
3 |
|
|
|
|
|
|
|||
Знаки угловых скоростей в формулах (3.8) определены из рис. 3.2, г, д. Для этого векторы линейных скоростей из плана скоростей прикладываем в точках С звеньев 2 и 3, которые показаны отделенными друг от друга. Направление 2 –отрица- тельное (по часовой стрелке), 3 –положительное (против часовой стрелки). Следует обратить внимание на то, что вектор cb прикладывается в точке С в соответствии с формулой (3.3).
4. Для построения плана ускорений составляется система векторныхуравнений:
a a an at ,
C B CB CB
|| BA||CB CB
|
|
|
|
|
|
|
n |
|
t |
(3.9) |
|
|
|
|
|
|
|
|
|||
aC ax x aCD aCD. |
||||||||||
|
|
0 |
||CD СD |
|
||||||
|
|
|
||||||||
ЛинейноеускорениеточкиB(нормальнаясоставляющая,тангенциальное ускорение отсутствует, так как 1 = 0):
a |
B |
2l |
AB |
1502 |
0,1 2250м с2. |
(3.10) |
|
1 |
|
|
|
Масштаб плана ускорений:
a = b / aB = 33,8 / 2250 = 0,015 мм/(м·с-2). (3.11)
Вектор b = 33,8 мм (рис. 3.2, в) проводим параллельно BA к точке вращения A. Из его конца в соответствии с первым урав-
32

нением(3.9) проводимнаправление, параллельное aCBn . Величинынормальныхсоставляющих относительныхускорений:
|
|
|
|
|
an |
v2 |
/l |
BC |
14,22 /0,2 1008,2м с2 |
; |
||
|
|
|
|
|
CB |
CB |
|
|
|
|
(3.12) |
|
|
|
|
|
|
an |
v2 |
/l |
CD |
2,42 /0,3 19,2 м с2. |
|||
|
|
|
|
|
CD |
CD |
|
|
|
|
|
|
|
Правило 6. Нормальное ускорение – центростремитель- |
|||||||||||
ное; оно всегда направлено к центру вращения. |
||||||||||||
|
Длиныотрезков, изображающих нормальныеускорения: |
|||||||||||
bn |
1 |
= an |
|
a |
=1008,2·0,015=15мм; n |
2 |
=19,2·0,015=0,3мм.(3.13) |
|||||
|
CB |
|
|
|
|
|
|
|
|
|||
Вектор bn1 = 15 мм направляем из точки b параллельно звену
CB в направлении от С к B (см. рис. 3.2, в). Из его конца проводим направление, перпендикулярное звену CB. Решая второевекторноеуравнениеиз(3.9),из полюса (так какaD =0и n20) проводим направление, перпендикулярное CD, до пересече-
ния с направлением aCDn .
Правило 7. Если длина отрезка меньше 2 мм, то на плане допускается его не изображать.
В точку пересечения c направляем стрелки векторов в соответствии с уравнениями (3.9). Длины векторов из постро-
енногопланаускорений:
bc = 23 мм; n1c = 18 мм; pc = 50 мм.
Точки s2 и s3 находим из свойства подобия планов:
bs2 = 0,4bc = 0,4·23 = 9,2 мм; s3 = 0,3 c = 0,3·50 = 15 мм.
Соединяем найденные точки s2 и s3 с полюсом . Длины отрезков, изображающих ускорения центров масс:
s2 = 40 мм; s3 = 15 мм.
Абсолютные ускорения точек:
aC = c / a = 50/0,015 = 3333,3 м/с2;
aS2 = 40/0,015 = 2666,7 м/с2; aS3 = 15/0,015 = 1000 м/с2.
Относительные тангенциальные составляющие: atCB = n1c / a = 18/0,015 = 1200 м/с2;
atCD = c / a = 50/0,015 = 3333,3 м/с2.
По тангенциальным составляющим линейных ускорений определяют угловые ускорения:
33
2 = atCB /lBC = 1200/0,2 = 6000 с–2; |
|
3 = atCD /lCD = 3333,3/0,3 = 11111,1 с–2. |
(3.14) |
Угловые ускорения шатуна и коромысла — положительные. Это следует из схем скоростей и ускорений звеньев (см. рис. 3.2,
г, д).
Правило 8. Планы положений, скоростей и ускорений необходимо изображать на одном листе во избежание искажений при переносе линий.
Исходные данные для кинематического анализа приведены в табл.3.1.
Таблица 3.1
Исходные данные для кинематического анализа кривошипно-коромыслового механизма
Параметр |
|
|
|
Вариант |
|
|
|
||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
||
|
|||||||||
Положение кривошипа |
1 |
2 |
4 |
5 |
7 |
8 |
10 |
11 |
|
Угловая скорость 1, с–1 |
24 |
-30 |
36 |
-40 |
50 |
-60 |
76 |
-80 |
|
Длины звеньев: lАВ, м |
0,3 |
0,35 |
0,4 |
0,45 |
0,55 |
0,5 |
0,6 |
0,7 |
|
lВС, м |
0,4 |
0,45 |
0,5 |
0,6 |
0,7 |
0,75 |
0,8 |
0,9 |
|
lCD, м |
0,5 |
0,55 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
1,1 |
|
lAD, м |
0,5 |
0,5 |
0,65 |
0,8 |
0,9 |
1,1 |
1,1 |
1,1 |
|
Координаты центров масс: lBS2, м |
0,15 |
0,2 |
0,2 |
0,25 |
0,3 |
0,3 |
0,35 |
0,4 |
|
lDS3, м |
0,15 |
0,2 |
0,25 |
0,25 |
0,25 |
0,3 |
0,3 |
0,3 |
|
3.2.2. Компьютерные расчеты
Для определения кинематических параметров кривошипнокоромыслового механизма используют программу ТМ23 в системе GWBASIC. Для этого в папке «ТММ» активизируют файл gwbasic.exe (вход в систему). Функциональной клавишей F3 (LOAD)вызываютрабочийфайл:наэкраневысвечиваетсяLOAD и студенту необходимо набрать без пробела ТМ23 (вызов файла), ENTER. Запуск программы осуществляют нажатием на клавишу F2 (RUN).
Алгоритм расчета приведен в пособии [2]. Образец распечатки компьютерных данныхпоисходным даннымрассмотренного примера приведен на рис. 3.3.
34
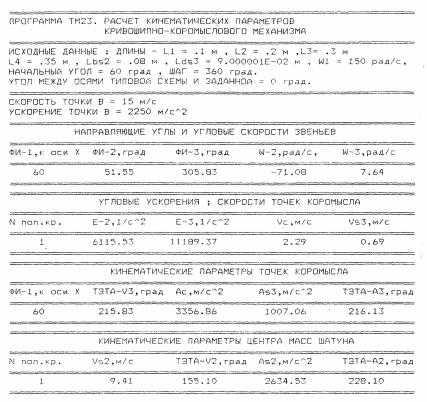
Рис. 3.3. Распечатка компьютерных данных расчета кинематических параметров кривошипно-коромыслового механизма
3.3.Кривошипно-ползунныймеханизм
3.3.1.Графоаналитический метод кинематического анализа кривошипно-ползунного механизма
Кривошипно-ползунный механизм (рис. 3.4) состоит из зве-
ньев: АВ – кривошип, ВС – шатун, C – ползун, А и х–х – стойка (рис. 3.5, а). В механизме три подвижных звена (n = 3) и четыре одноподвижные кинематические пары: в точках A, B и C – вращательные, в точке С –поступательная (число низших пар p1 = 4). Число степеней свободы по формулеЧебышева – формула (2.1): W = 3 · 3 – 2 · 4 = 1. Отсоединяем диаду 2-го вида 2–3. Остается начальный механизм I класса (звено 1). Формула строения механизма: I(1) – II2(2–3). Заданный механизм II
35
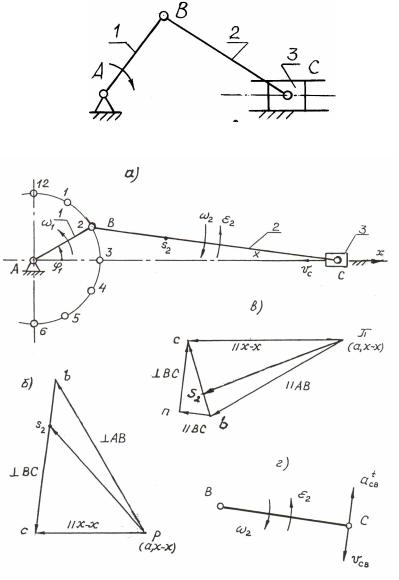
класса. В диаде 2–3 (см. рис. 3.5, а) известна кинематика точки В и неизвестна кинематика точки С.
Рис. 3.4. Кривошипно-ползунный механизм
Рис. 3.5. Планы скоростей и ускорений кривошипно-ползунного механизма
36

Для примера приняты следующие исходные данные: угловая скорость кривошипа 1 = 215 с–1, длины звеньев lAB = 0,08 м, lBС=0,3м,координататочкиS2 –lBS2=0,09м.Угловаякоордината кривошипа 1 =30°.Определитьлинейныескоростииускорения точек B, C и S2, угловую скорость и ускорение звена 2.
Решение
1. Вычерчиваем план положений механизма (см. рис. 3.5, а). Длясхемынарис.3.5,авправомкрайнемположениикривошипа горизонтальный габарит механизма составляет
lAB + lВС = 0,08 + 0,3 = 0,38 м.
На листе формата А4 максимальный чертежный размер
150…180 мм. Масштаб плана положений: |
|
l = / AC (lAB + lВС) = 150 / 0,38 = 395 мм/м. |
(3.15) |
По исходным данным примера масштаб для упрощения последующих расчетов следует принимать 400 мм/м. В данной работепринят l=200мм/м.Длиныотрезковнапланеположений:
АB = l = 0,08 · 200 = 16 мм;
BC = lBC l = 0,3 · 200 = 60 мм; BS2 = 0,09 · 200 = 18 мм.
Длину отрезка AB = 16 мм откладываем в заданном положении кривошипа. План положений механизма строим, начиная с нанесения элементов стойки, т.е. неподвижной точки А и
горизонтальнойлиниих–х,проходящейчерезточкуА.Призадан- номположениикривошипаположениеточкиСопределяеммето-
дом засечек.
2. Для построения плана скоростей используем векторные уравнения
v |
v |
|
v , |
|
||||||||
C |
|
|
B |
|
|
CB |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
. |
(3.16) |
|||||
vC |
vx x |
vCx |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
где vB – линейная скорость, м/с, – формула (3.4); направлена перпендикулярно к звену 1 в сторону вращения.
vВ = 1lAB = 215 · 0,08 = 17,2 м/с.
Масштаб плана скоростей
v = pb /vB = 43/17,2 = 2,5 мм/(м·с –1).
На плане скоростей (рис. 3.5, б) откладываем отрезок pb = 43 мм.Изегоконцапроводимнаправление,перпендикуляр-
37

ное BC. Из полюса p проводим направление x–x. Пересечение направлений дает искомую точку c, в которую направляем векторы pc и bc. Получаем длины отрезков:
pc = 26 мм; bc = 37,5 мм.
Из пропорции (3.7)находим длинуотрезка: bs2 = 37,5·0,09/0,3 = 11,3 мм.
Соединяем полученную точку s2 с полюсом p. Вектор направляем из полюса в точку s2. Длина вектора ps2 = 34,5 мм. Абсолютные линейные скорости
vC = pc / v = 26/2,5 = 10,4 м/с; vS2 = 34,5/2,5 = 13,8 м/с.
Относительная скорость vCB = 37,5/2,5 = 15 м/с. Модуль угловой скорости 2 = vCB / lBC = 15/0,3 = 50 с–1.
Направление угловой скорости определяем путем переноса вектора vCB в точку С шатуна. Из рис. 3.5, г видно, что точка C относительно B вращается по часовой стрелке (со знаком «минус»). Следовательно, 2 = –50 с–1.
3. Как и при построении плана скоростей, векторные уравнения для определения ускорений составляют для внутренней кинематической пары С диады 2–3:
|
|
|
|
|
|
n |
|
|
|
t |
|
|||
|
|
|
|
|
|
|
|
|||||||
aC aB aCB aCB , |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|| BA ||CB CB |
|
|||||||||||
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
k |
|
|
|
|
r |
(3.17) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
aC ax x aCx aCx. |
||||||||||||||
|
|
|
0 |
|
0 |
|| x x |
|
|||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ускорение точки B (центростремительное, вектор направлен
к точке A):
aB = 2152 · 0,08 = 3698 м/с2.
Масштаб плана ускорений a = 37/3698 = 0,01 мм /(м·с-2).
Нормальное относительное ускорение aCBn vCB2 /lBC = 152/0,3 = = 750 м/с2. Длина отрезка bn, изображающего ускорение aCBn ,
bn = aCBn a = 750 · 0,01 = 7,5 мм.
Из полюса p проводим вектор b = 37 мм параллельно звену BA (рис. 3.5, в). Из его конца откладываем отрезок bn = 7,5 мм
параллельно CB в сторону точки B. Кориолисово ускорение aCxk = 0, так как направляющая x–x, покоторой движется ползун,
38

неподвижна, поэтомудалее из полюса проводим направление, параллельное направляющей x–x, до пересечения с направлени-
ем aCBt в искомой точке c, в которую направляем стрелки искомых векторов.
Правило 9. Если направляющая неподвижна, то кориолисово ускорение равно нулю.
Измеренные длины отрезков:
с = 37 мм, nc = 17,5 мм, bc = 19 мм.
Изпропорции(3.7)посвойствуподобиянаходимдлинуотрезка:
bs2 = bc· lBS2/lBC = 19 · 0,09/0,3 = 5,7 мм.
Полученную точку s2 соединяем с полюсом . Длина вектора:
s2 = 36,5 мм.
Абсолютныелинейные ускорения:
aС = с / a = 37/0,01 = 3700 м/с2; aS2 = 36,5/0,01 = 3650 м/с2.
Относительные ускорения:
aCBt = nc/ a = 17,5/0,01 = 1750 м/с2; aС B = 19/0,01 = 1900 м/с2.
Модуль углового ускорения шатуна:
2 = aCBt /lBC = 1750/0,3 = 5833,3 с–2.
Направление 2–положительное,противчасовойстрелки(см.
рис. 3.5, г).
Исходные данные для кинематического анализа приведены в табл. 3.2.
Таблица 3.2
Исходные данные кривошипно-ползунного механизма
Параметр |
|
|
|
Вариант |
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
Положение кривошипа |
1 |
2 |
4 |
5 |
7 |
8 |
10 |
11 |
Угловая скорость 1, с-1 |
24 |
-30 |
36 |
-40 |
50 |
-60 |
76 |
-80 |
Длины звеньев: lАВ, м |
0,3 |
0,35 |
0,4 |
0,45 |
0,55 |
0,5 |
0,6 |
0,7 |
lВС, м |
0,6 |
0,8 |
1,0 |
1,2 |
1,4 |
1,6 |
1,6 |
1,6 |
Координата центра масс lBS2, м |
0,25 |
0,3 |
0,35 |
0,45 |
0,6 |
0,65 |
0,7 |
0,75 |
3.3.2. Компьютерные расчеты
Для определения кинематических параметров кривошипноползунного механизма используют программу ТМ24 в системе GWBASIC. Для этого в папке «ТММ» активизируют файл gwbasic.exe (вход в систему). Функциональной клавишей F3 (LOAD)вызываютрабочийфайл:наэкраневысвечиваетсяLOAD
39
и студенту необходимо добавить без пробела ТМ24 (вызов файла), ENTER. Запуск программы осуществляют нажатием на клавишу F2 (RUN).
Алгоритм расчета приведен в пособии [2]. Образец распечатки компьютерных данныхпоисходным даннымрассмотренного примера приведен на рис. 3.6.
ПРОГРАММА ТМ24. РАСЧЕТ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА
ИСXОДНЫЕ ДАННЫЕ: ДЛИНЫ - L1 = .05 М, L2 = .2 М, Lbs2 = .06 м, W1 = 30 рад/с., НАЧАЛЬНЫЙ УГОЛ = 15 град, ШАГ = 360 град. УГОЛ МЕЖДУ ОСЯМИ ТИПОВОЙ СХЕМЫ И ЗАДАННОЙ = 45 град.
СКОРОСТЬ ТОЧКИ В = 1,5 м/с, УСКОРЕНИЕ ТОЧКИ В = 45 м/с^2.
КИНЕМАТИЧЕСКИЕ ПАРАМЕТРЫ ШАТУНА
ФИ-1, К ОСИ Х |
№ пол. кр. |
ФИ-2, град |
W-2, рад/с |
Е-2, 1/с^2 |
60 |
1 |
40,29 |
-7,26 |
54,94 |
|
КИНЕМАТИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЗУНА |
|||
|
|
|
|
|
ФИ-1, град |
№ пол. кр |
рас. от НМТ, м |
V-c, м/с |
A-c, м/с^2 |
60 |
1 |
0,098 |
-0,48 |
-53,27 |
КИНЕМАТИЧЕСКИЕ ПАРАМЕТРЫ ЦЕНТРА МАСС ШАТУНА |
||||
ФИ-1, град |
V-s2, м/с |
ТЭТА-V2, град |
A-s2 м/с ^2 |
ТЭТА-А2, град |
60 |
1,1 |
157,32 |
47,15 |
235,2 |
|
|
|
|
|
Рис. 3.6. Распечатка компьютерных данных расчета кинематических параметров кривошипно-ползунного механизма
3.4.Кривошипно-кулисныймеханизм
3.4.1.Графоаналитический метод кинематического анализа кривошипно-кулисного механизма
Кривошипно-кулисныймеханизм(рис.3.7)имееттриподвиж- ныхзвена(рис. 3.8):1–кривошип,2–камень кулисы,3–кулиса. Звенья соединяются междусобой четырьмя низшими кинематическимипарами:тремявращательнымииоднойпоступательной. Число степеней свободы по формуле Чебышева
W= 3n – 2p1 = 3 · 3 – 2 · 4 = 1.
Впроцессе структурного анализа отсоединяют одну диаду 3-го
вида 2–3, где неизвестной является кинематика средней точки В. Остается начальный механизм I класса.
40