

725
.pdfПримечание. Первая ступень — планетарная с передаточным отношением , числом сателлитов nc и модулем mI. Вторая ступень — простая с
модулем mII и числами зубьев шестерни и колеса z4 и z5 .
29
Таблица 2.17
Исходные данные кулачковых механизмов
Параметры |
|
|
|
|
Номер варианта |
|
|
|
|||
1 |
2 |
3 |
4 |
|
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
||||||||||
движения |
синус |
синус |
кос |
кос |
|
треуг |
треуг |
прям |
прям |
синус |
треуг |
закон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вид меха- |
кор |
пост |
кор |
пост |
|
кор |
пост |
кор |
пост |
кор |
пост |
низма |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
φу, град |
96 |
72 |
108 |
96 |
|
60 |
144 |
168 |
120 |
132 |
156 |
φд, град |
84 |
108 |
72 |
96 |
|
120 |
36 |
12 |
60 |
48 |
24 |
φс, град |
96 |
72 |
108 |
96 |
|
60 |
144 |
168 |
120 |
132 |
156 |
φб, град |
84 |
108 |
72 |
96 |
|
120 |
36 |
12 |
60 |
48 |
24 |
Smax, мм |
– |
30 |
– |
28 |
|
– |
26 |
– |
25 |
– |
24 |
ψmax, град |
30 |
– |
28 |
– |
|
26 |
– |
25 |
– |
24 |
– |
l, мм |
125 |
– |
120 |
– |
|
115 |
– |
110 |
– |
105 |
– |
'äî ï , град |
45 |
30 |
45 |
30 |
|
45 |
30 |
45 |
30 |
45 |
30 |
Примечание. Вид механизмов — с поступательно движущимся толкателем и коромысловый. Законы изменения ускорения — синусоидальный,
косинусоидальный, треугольный, |
прямоугольный. Допускаемый угол дав- |
ления в фазе сближения 'äî ï = 45 |
град. |
Пояснения к заданию 4
Двухступенчатый поршневой компрессор простого действия К-5 (рис. 2.7, а) приводится в действие электродвигателем через зубчатую передачу (рис. 2.7, в). Передаточное отношение простой зубчатой передачи определяется по формуле (2.1). Передаточное отношение планетарной передачи рассчитывается по формуле:
i |
i3 |
|
Ä |
. |
(2.6) |
|
|||||
ï ë |
1h |
|
1i45 |
|
|
|
|
|
|
||
Общее передаточное отношение редуктора — формула (2.2). Зубчатую передачу z4/z5 необходимо проектировать с оптимальным смещением. Цели смещения: устранение подрезания, вписывание в стандартное межосевое расстояние, повышение износостойкости, изгибной прочности. Оптимизацию коэффициентов смещения, расчет геометрических параметров простой
30
ступени и подбор чисел зубьев планетарного редуктора выполнить на ЭВМ.
В компрессоре с V-образным расположением рабочих цилиндров последовательно осуществляется сжатие воздуха движущимися поршнями 3 и 5. В начале в цилиндре С первой ступени при движении поршня 3 к нижней мертвой точке (НМТ) создается разрежение, вследствие которого производится забор воздуха из атмосферы. Движение поршня С к верхней мертвой точке (ВМТ) производит сжатие воздуха. Выталкиваемый сжатый воздух поступает в холодильник, после охлаждения в котором направляется в цилиндр D второй ступени и заполняет его во время движения поршня к НМТ. При движении к ВМТ поршень 5 осуществляет сжатие воздуха на высокое давление, сжатый воздух поступает в воздухосборник (ресивер) и через воздушную сеть к потребителю.
На индикаторной диаграмме правого цилиндра (рис. 2.7, б) линия a–b соответствует всасыванию в цилиндре низкого давления с разрежением pB = 0,02 МПа, линия b–c — сжатию и линия c–d — нагнетанию с давлением pС, max = 0,18 МПа. В цилиндре D в соответствии с индикаторной диаграммой левого цилиндра заполнение сжатым воздухом соответствует линии a'–b' c давлением pD = 0,15 МПа, затем по линии b'–c' происходит сжатие второй ступени и по линии c'–d' — нагнетание при давлении pmax (см. табл. 2.15). Длины линейных участков для построения диаграмм ab = a'b' = 0,8H, cd = c'd' = 0,4H. На участках диаграммы d–da, b–bc, d' — a'–b' на поршни действуют движущие силы, на остальных — силы сопротивления. Диаграммы строить на ходе поршня С и на ходе поршня D.
Момент движущих сил, развиваемый двигателем и приложенный к кривошипу, считать постоянным.
31
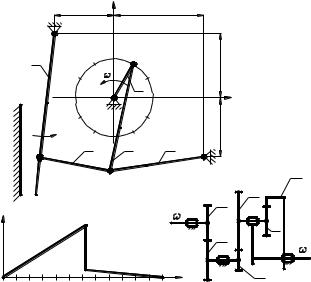
Задание 5 Механизмы щековой дробилки
Исходные данные
Кинематическая схема рычажного механизма, приведена на рис. 2.8, а, диаграмма моментов сил сопротивления на щеке — на рис. 2.8, б. Исходные данные для рычажного механизма приведены в табл. 2.18, зубчатых механизмов — в табл. 2.19, кинематическая схема сложного зубчатого механизма — на рис. 2.8, в. Исходные данные кулачковых механизмов приведены в табл. 2.20. Схемы кулачковых механизмов приведены на рис. 2.2, законы движения их толкателей — на рис.
2.3.
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
a) |
|
|
x2 |
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
CE = CD |
|
|
|
|
|
|
|
|
|
|
|
|
CS 3 = CS4= 0,5 CD |
||
|
|
|
|
|
12 |
|
|
|
|
|
|
||
|
|
|
|
11 |
|
1 B |
|
|
|
|
FS5 = 0,6 CD |
||
|
5 |
|
|
|
|
|
|
y |
|
||||
|
|
|
|
|
|
|
|
|
|
2 |
|
x2 = 0,5 x |
|
|
|
|
|
10 |
1 |
|
|
2 |
|
|
|
y2 = 1,2 y |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||
|
|
|
|
9 |
S 1 |
A |
|
3 |
|
|
х |
|
|
|
S5 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
S2 |
|
4 |
|
y |
|
|
|
|
|
Mc |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
5 |
|
|
1 |
|
|
|
||
|
|
|
|
7 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
4 |
|
2 |
|
|
3 |
D |
|
|
|
|
|
S4 |
|
|
|
|
S3 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
C |
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m I |
|
4 |
mII |
|
|
|
|
|
|
|
|
|
в) |
|
|
||
|
|
|
|
|
|
|
|
|
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
Mc |
|
|
Mc max |
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4' |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
0,1 M c max |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
6 |
7 |
8 |
9 |
10 |
11 |
12 |
1 |
2 |
3 |
4 |
5 |
6 |
Рис. 2.8
32
Таблица 2.18
Исходные данные рычажного механизма
Параметры |
|
|
|
Номер варианта |
|
|
|
|||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|||
|
|
|||||||||||
, рад/с |
–20 |
21 |
–22 |
23 |
–24 |
25 |
–26 |
27 |
–28 |
29 |
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
lAB , м |
0,08 |
0,09 |
0,1 |
0,11 |
0,12 |
0,08 |
0,09 |
0,1 |
0,11 |
0,112 |
||
lBC , м |
0,65 |
0,65 |
0,7 |
0,7 |
0,8 |
0,8 |
0,75 |
0,75 |
0,85 |
0,85 |
||
lCD , м |
0,5 |
0,52 |
0,55 |
0,58 |
0,6 |
0,62 |
0,65 |
0,5 |
0,52 |
0,85 |
||
lEF , м |
1 |
1,05 |
1,1 |
1,15 |
1,2 |
1,25 |
1,3 |
1,35 |
1,4 |
1,45 |
||
lBS 2 , м |
0,26 |
0,27 |
0,28 |
0,29 |
0,3 |
0,31 |
0,32 |
0,33 |
0,34 |
0,35 |
||
x |
, м |
0,45 |
0,48 |
0,5 |
0,52 |
0,55 |
0,58 |
0,6 |
0,62 |
0,65 |
0,68 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
x2 , м |
0,5 |
0,52 |
0,55 |
0,6 |
0,62 |
0,65 |
0,68 |
0,7 |
0,72 |
0,75 |
||
m |
, кг |
4100 |
4200 |
4300 |
4400 |
4500 |
4600 |
4700 |
4800 |
4900 |
5000 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
m |
, кг |
800 |
850 |
900 |
950 |
1000 |
1050 |
1100 |
1150 |
1200 |
1250 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
m m , кг |
160 |
170 |
180 |
190 |
200 |
210 |
220 |
230 |
240 |
250 |
||
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
m |
, кг |
4500 |
4600 |
4700 |
4800 |
4900 |
5000 |
5100 |
5200 |
5300 |
5400 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
IS 2 , кг·м2 |
75 |
76 |
77 |
78 |
79 |
80 |
81 |
82 |
83 |
84 |
||
IS 3 IS 4 , кг·м2 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
||
IS 5 , кг·м2 |
250 |
260 |
270 |
280 |
290 |
250 |
60 |
270 |
280 |
290 |
||
MC max , кН·м |
20 |
22 |
24 |
26 |
28 |
30 |
32 |
30 |
28 |
16 |
||
|
|
0,05 |
0,048 |
0,046 |
0,044 |
0,042 |
0,04 |
0,038 |
0,036 |
0,034 |
0,032 |
|
Примечание. Длины звеньев и координаты:
|
lCE lCD , lCS 2 lCS 3 0,5lCD , lFS 5 |
0,6lEF , x2 |
0,5x1, y2 1, 2y1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
Таблица 2.19 |
||
|
|
Исходные данные зубчатых механизмов |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Параметры |
|
|
|
|
Номер варианта |
|
|
|
||||
|
1 |
2 |
3 |
4 |
|
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
||||||||||
, рад/с |
|
291 |
292 |
293 |
294 |
|
295 |
296 |
297 |
298 |
299 |
300 |
Ä |
|
|
||||||||||
aw, мм |
|
120 |
150 |
105 |
160 |
|
160 |
125 |
185 |
170 |
130 |
110 |
z1 |
|
12 |
13 |
14 |
15 |
|
12 |
13 |
14 |
15 |
12 |
13 |
z2 |
|
20 |
30 |
25 |
34 |
|
33 |
25 |
32 |
28 |
25 |
28 |
m , мм |
|
6 |
7 |
5 |
6 |
|
7 |
5 |
8 |
7 |
6 |
5 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
m , мм |
|
12 |
13 |
14 |
12 |
|
14 |
15 |
13 |
14 |
15 |
12 |
II |
|
|
|
|
|
|
|
|
|
|
|
|
33
Примечание. Первая ступень — простая с модулем mI и числами зубьев шестерни и колеса z1 и z2. Вторая ступень — планетарная с передаточным отношением , числом сателлитов nc и модулем mII .
Таблица 2.20
Исходные данные кулачковых механизмов
Параметры |
|
|
|
|
Номер варианта |
|
|
|
|||
1 |
2 |
3 |
4 |
|
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
||||||||||
движения |
синус |
кос |
треуг |
прям |
|
синус |
кос |
треуг |
прям |
синус |
кос |
закон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вид |
пост |
кор |
пост |
кор |
|
пост |
кор |
пост |
кор |
пост |
кор |
механизма |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
φу, град |
60 |
72 |
84 |
96 |
|
108 |
120 |
132 |
144 |
156 |
168 |
φд, град |
120 |
108 |
96 |
84 |
|
72 |
60 |
48 |
36 |
24 |
12 |
φс, град |
60 |
72 |
84 |
96 |
|
108 |
120 |
132 |
144 |
156 |
168 |
φб, град |
120 |
108 |
96 |
84 |
|
72 |
60 |
48 |
36 |
24 |
12 |
Smax, мм |
15 |
|
18 |
|
|
22 |
|
25 |
|
28 |
|
ψmax, град |
|
16 |
|
20 |
|
|
24 |
|
26 |
|
30 |
l, мм |
|
85 |
|
95 |
|
|
105 |
|
115 |
|
125 |
'äî ï , град |
30 |
45 |
30 |
45 |
|
30 |
45 |
30 |
45 |
30 |
45 |
|
|
|
|
|
|
|
|
|
|
|
|
Примечание. Вид механизмов — с поступательно движущимся толкателем и коромысловый. Законы изменения ускорения — синусоидальный, косинусоидальный, треугольный, прямоугольный. Допускаемый угол дав-
ления в фазе сближения ' |
= 45 град. |
äî ï |
|
Пояснения к заданию 5
В рычажном механизме щековой дробилки СМ-211 момент сил сопротивления Mc, величина которого задана диаграммой (рис. 2.8, б), приложен к подвижной массивной щеке 5 (рис. 2.8,
а).
На участке рабочего хода 6…12 момент направлен противоположно угловой скорости звена 5. На участке холостого хода 12…6 возврат звена 5 в исходное положение осуществляется с помощью пружины, создающей движущий момент, совпадающий с направлением движения звена 5. В любом положении кривошипа момент будет иметь положительное направление (против часовой стрелки).
34
Напротив подвижной щеки 5 жестко закреплена неподвижная щека. Подвижная щека получает качание от вращения эксцентрикового вала 1, по концам которого насажены массивные маховики. В точке С — двойной шарнир с соединением звеньев 2—3 и 2–4. Момент движущих сил, развиваемый двигателем и приложенный к кривошипу, считать постоянным.
Привод щековой дробилки осуществляется от электродвигателя через зубчатый механизм (рис. 2.8, в), состоящий из простой ступени z1/z2 с модулем mI и планетарной 3-h с модулем mII. Передаточное отношение простой ступени определяется по формуле (2.4). Передаточное отношение планетарной передачи
i |
i5 |
|
Ä |
. |
(2.7) |
|
|||||
ï ë |
3h |
|
1i12 |
|
|
|
|
|
|
||
Общее передаточное отношение — формула (2.5). Зубчатую передачу z1/z2 необходимо проектировать с оптимальным смещением. Цели смещения: вписывание в заданное межосевое расстояние, повышение износостойкости и изгибной прочности. Оптимизацию коэффициентов смещения и подбор чисел зубьев планетарного редуктора выполнить на ЭВМ.
Задание 6 Механизмы поперечно-строгального станка
Исходные данные
Кинематическая схема рычажного механизма и диаграмма сил сопротивления приведены на рис. 2.9, а, б. Исходные данные для рычажного механизма приведены в табл. 2.21, зубчатых механизмов — в табл. 2.22, кинематическая схема сложного зубчатого механизма — на рис. 2.9, в. Исходные данные кулачковых механизмов приведены в табл. 2.23. Схемы кулачковых механизмов приведены на рис. 2.2, законы движения их толкателей — на рис. 2.3.
35

a) |
|
|
|
у |
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
x2 |
Fc |
|
|
|
E |
|
|
|
|
|
|
0,1H |
|
0,1H |
|
|
|
|
|
|
|
|
|
|
S |
4 |
S5 |
|
|
|
|
|
|
|
4 |
D |
5 |
|
|
Fc |
|
|
|
|
|
|
|
|
|
|
|
|||
3 |
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
y2 |
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
2 |
|
11 |
1 |
|
|
|
H - ход резца |
||
|
|
|
|
|
|||||
|
|
|
1 |
|
2 |
в) |
|
|
|
|
B |
|
|
1 |
2' |
3 |
mII |
||
|
|
|
|
S 1 |
|
|
|||
|
9 |
|
|
3 |
х |
|
|
mI |
|
|
|
|
A |
|
|
|
|
|
|
|
|
S3 |
|
|
|
|
2 |
|
1 |
|
8 |
|
|
|
4 |
|
|
||
|
|
|
|
|
|
|
|
||
CS3 = 0,5 CD |
7 |
|
5 |
|
y1 |
|
|
|
|
DS4 =0,5 DE |
|
6 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
д |
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
4 |
|
|
|
|
|
Рис. 2.9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.21 |
|
Исходные данные рычажного механизма |
|
|||||||
Параметры |
|
|
|
Номер варианта |
|
|
|
||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
|
|||||||||||
, рад/с |
–10 |
–10,5 |
–11 |
–11,5 |
–12 |
– |
–13 |
– |
–14 |
–9 |
|
|
|
||||||||||
1 |
|
|
|
|
|
12,5 |
|
13,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
lAB , м |
0,08 |
0,09 |
0,1 |
0,11 |
0,12 |
0,13 |
0,14 |
0,15 |
0,16 |
0,17 |
|
lCD , м |
1,17 |
1,3 |
0,84 |
0,76 |
0,81 |
0,93 |
0,77 |
0,85 |
0,68 |
1,3 |
|
lBE , м |
0,4 |
0,44 |
0,29 |
0,27 |
0,28 |
0,32 |
0,28 |
0,3 |
0,24 |
0,4 |
|
y , м |
0,65 |
0,72 |
0,45 |
0,41 |
0,43 |
0,5 |
0,4 |
0,44 |
0,37 |
0,7 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
y2 , м |
0,5 |
0,55 |
0,37 |
0,33 |
0,36 |
0,41 |
0,34 |
0,38 |
0,28 |
0,55 |
|
m , кг |
7 |
8 |
9 |
10 |
11 |
7 |
8 |
9 |
10 |
11 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
m2 m4 , |
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
4 |
5 |
|
кг |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
m , кг |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
15 |
16 |
17 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
m , кг |
60 |
62 |
65 |
68 |
70 |
72 |
74 |
76 |
78 |
90 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
IS 2 , кг·м2 |
0,07 |
0,08 |
0,09 |
0,1 |
0,11 |
0,12 |
0,13 |
0,14 |
0,15 |
0,16 |
|
IS 4 , кг·м2 |
0,02 |
0,03 |
0,04 |
0,05 |
0,06 |
0,07 |
0,02 |
0,03 |
0,04 |
0,05 |
|
FC, кН |
1,6 |
1,8 |
2 |
1,6 |
1,8 |
2 |
1,6 |
1,8 |
2 |
2,2 |
|
|
0,02 |
0,025 |
0,03 |
0,035 |
0,04 |
0,04 |
0,035 |
0,03 |
0,025 |
0,02 |
|
|
|
|
|
|
|
|
|
|
|
36 |
|
|
Примечание. Координаты: l |
|
0,5l , l |
DS 4 |
0,5l |
DE |
|
|
|
|
|||||||
|
|
|
|
|
CS 3 |
|
CD |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.22 |
||
|
|
|
Исходные данные зубчатых механизмов |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Параметры |
|
|
|
|
|
Номер варианта |
|
|
|
|
|
||||||
1 |
|
2 |
3 |
|
4 |
5 |
|
|
6 |
|
7 |
8 |
|
9 |
10 |
||
|
|
|
|
|
|
|
|
||||||||||
|
, рад/с |
298 |
|
296 |
295 |
294 |
293 |
|
292 |
291 |
290 |
|
289 |
288 |
|||
|
Ä |
|
|
|
|||||||||||||
|
z4 |
12 |
|
13 |
14 |
15 |
12 |
|
|
13 |
|
14 |
15 |
|
12 |
13 |
|
|
z5 |
36 |
|
40 |
38 |
36 |
29 |
|
|
30 |
|
27 |
35 |
|
32 |
43 |
|
m , мм |
3 |
|
3,5 |
4 |
4,5 |
5 |
|
|
3 |
|
3,5 |
4 |
|
4,5 |
5 |
||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m , мм |
8 |
|
9 |
8 |
|
9 |
8 |
|
|
9 |
|
7 |
8 |
|
7 |
8 |
|
|
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примечание. Первая ступень — планетарная с передаточным отношением , числом сателлитов nc и модулем mI. Вторая ступень — простая с
модулем m |
и числами зубьев шестерни и колеса z |
4 |
и |
z |
5 |
. |
|
|
|
|
||||||||
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.23 |
|
||
|
|
Исходные данные кулачковых механизмов |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Параметры |
|
|
|
|
|
|
Номер варианта |
|
|
|
|
|
|
|||||
|
|
1 |
2 |
3 |
4 |
|
5 |
6 |
|
|
|
7 |
8 |
9 |
|
10 |
||
|
|
|
|
|
|
|
|
|||||||||||
движения |
|
|
прям |
прям |
треуг |
треуг |
|
синус |
синус |
|
|
кос |
кос |
синус |
|
кос |
||
закон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вид механизма |
|
пост |
кор |
пост |
кор |
|
пост |
кор |
|
|
пост |
кор |
пост |
|
кор |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
φу, град |
|
|
60 |
144 |
96 |
168 |
|
72 |
132 |
|
108 |
156 |
84 |
|
120 |
|||
φд, град |
|
|
120 |
36 |
84 |
12 |
|
108 |
48 |
|
|
72 |
24 |
96 |
|
60 |
||
φс, град |
|
|
60 |
144 |
96 |
168 |
|
72 |
132 |
|
108 |
156 |
84 |
|
120 |
|||
φб, град |
|
|
120 |
36 |
84 |
12 |
|
108 |
48 |
|
|
72 |
24 |
96 |
|
60 |
||
Smax, мм |
|
|
15 |
|
16 |
|
|
18 |
|
|
|
20 |
|
22 |
|
|
||
ψmax, град |
|
|
|
24 |
|
25 |
|
|
26 |
|
|
|
|
28 |
|
|
30 |
|
l, мм |
|
|
|
105 |
|
110 |
|
|
115 |
|
|
|
|
120 |
|
|
125 |
|
'äî ï , град |
|
|
30 |
45 |
30 |
45 |
|
30 |
45 |
|
|
30 |
45 |
30 |
|
45 |
||
Примечание. Вид механизмов — с поступательно движущимся толка- |
|
|||||||||||||||||
телем и коромысловый. Законы изменения ускорения — синусоидальный, |
|
|||||||||||||||||
косинусоидальный, треугольный, прямоугольный. Допускаемый угол дав- |
|
|||||||||||||||||
ления в фазе сближения |
= 45 град. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
äî ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
37
Пояснения к заданию 6
Рычажный механизм поперечно-строгального станка 735 (рис. 2.9, а) приводится в движение от электродвигателя через зубчатую передачу (рис. 2.9, в), состоящую из планетарной
ступени 1-h с модулем mI и простой z4/ z5 с модулем mII. График сил производственного сопротивления (рисунок 2.9,
б) задан для рабочего хода, соответствующего положениям 9,10…3 кривошипа, вращающегося по часовой стрелке. В режиме холостого хода FC = 0. Координаты x1 и x2 ползуна 5 задать произвольно. Реакцию R05 определить суммарную, без распределения по двум опорам. Момент движущих сил, развиваемый двигателем и приложенный к кривошипу, считать постоянным.
Передаточное отношение простой зубчатой передачи определяется по формуле (2.1). Передаточное отношение планетарной передачи — по формуле (2.6). Общее передаточное отношение редуктора — формула (2.2). Зубчатую передачу z4/z5 необходимо проектировать с оптимальным смещением. Цели смещения: устранение подрезания, вписывание в стандартное межосевое расстояние, повышение износостойкости, изгибной прочности. Оптимизацию коэффициентов смещения, расчет геометрических параметров простой ступени и подбор чисел зубьев планетарного редуктора выполнить на ЭВМ.
Задание 7 Механизмы качающегося конвейера
Исходные данные
Кинематическая схема рычажного механизма приведена на рис. 2.10, а. Исходные данные для рычажного механизма приведены в табл. 2.24, зубчатых механизмов — в табл. 2.25, кинематическая схема сложного зубчатого механизма — на рис. 2.10, б. Исходные данные кулачковых механизмов приведены в табл. 2.26. Схемы кулачковых механизмов приведены на рис. 2.2, законы движения их толкателей — на рис. 2.3.
38