

тр тау в65
.docxФедеральное государственное бюджетное образовательное учреждение высшего образования «Национальный исследовательский университет «МЭИ»
Институт информационных и вычислительных технологий
Кафедра управления и интеллектуальных технологий
Расчетное задание по теме:
«АНАЛИЗ ЛИНЕЙНЫХ ИМПУЛЬСНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ».
Вариант №65.
Выполнил:
студент группы А-03-19
Муромцева Э. А.
Проверил:
Сидорова Е.Ю.
Москва 2022
Исходные данные:
Схема САУ |
Тип ИЭ |
Передаточные функции звеньев, входящих в состав САУ |
|||||
№ |
|
|
|
|
|
||
3б |
6а |
0 |
|
|
8 |
- |
|







Задание.
Преобразовать исходную структурную схему к типовому виду; определить непрерывную передаточную функцию приведенной непрерывной части разомкнутой импульсной системы
 .
.
Исходная структурная схема импульсной системы автоматического управления (ИСАУ) и выходной сигнал импульсного элемента (ИЭ) представлены на рис 1 и рис 2.
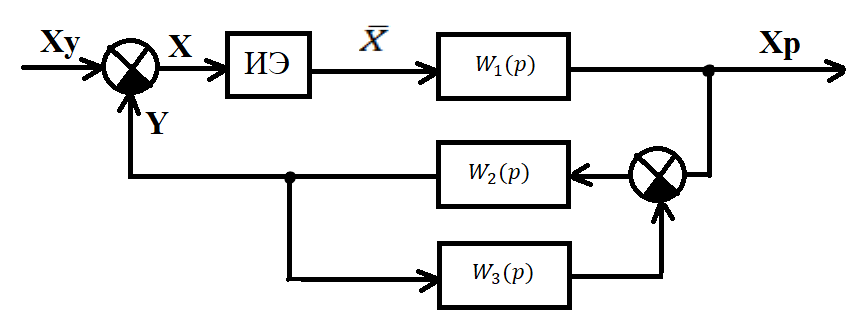
Рис 1. Исходная структурная схема САУ.
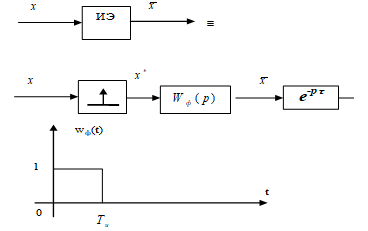
Рис 2. Схема замещения ИЭ.
 – время
квантования (дискретизации).
– время
квантования (дискретизации).



Преобразуем исходную схему ИСАУ к общему виду:
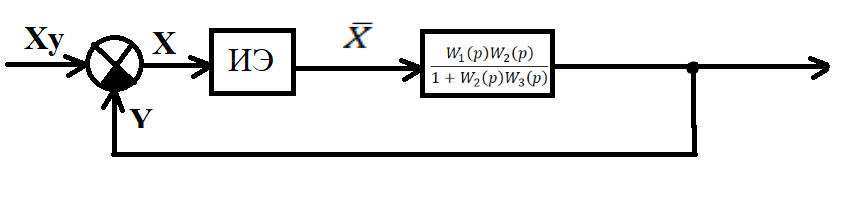
Рис 3. Преобразованная структурная схема САУ.
Выражение для непрерывной передаточной функции разомкнутой системы:

Общий вид передаточной функции приведенной непрерывной части:

Передаточная функция фильтра:
Тогда, передаточная функция приведенной непрерывной части:

По
 найти
дискретную передаточную функцию
разомкнутой импульсной системы
найти
дискретную передаточную функцию
разомкнутой импульсной системы

Применим дискретное преобразование Лапласа к передаточной функции приведенной непрерывной части, чтобы получить передаточную функцию разомкнутой импульсной системы.

Приведем выражение к одному знаменателю:

Введем обозначения:
Пусть:

 0.006828
0.006828
 0.007025
0.007025
 -32.615
-32.615

Тогда получим:
Построить годограф разомкнутой импульсной САУ двумя способами:
Точным (непосредственно по найденной ранее передаточной функции.
Приближенным – по формуле.
Сравнить построенные годографы.
 ,
где
,
где

Возьмем первые 4 слагаемых.





Где

Построение годографов:
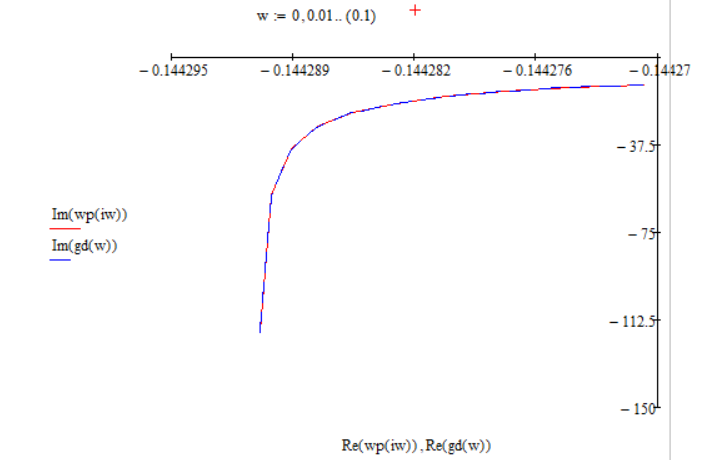
Рис
4. АФЧ для
 .
.
По рисунку видим, что годографы практически идентичны.
Оценить устойчивость замкнутой импульсной САУ и найти предельный коэффициент усиления:
По критерию Найквиста
Годограф разомкнутой ИСАУ не охватывает точку (-1;). Следовательно, замкнутая система устойчива.
Найдем значение предельного коэффициента усиления разомкнутой ИСАУ:
По критерию Гурвица;
Найдем
передаточную функцию замкнутой ИСАУ,
выделив коэффициент усиления разомкнутой
системы
 .
.

Введем
обозначение
 и запишем характеристическое уравнение:
и запишем характеристическое уравнение:

Произведем
подстановку
 . Тогда получим:
. Тогда получим:
 ,
при
,
при
 =0.016
=0.016
 =2.755
=2.755
 =65.229
=65.229
Составим определитель Гурвица:



Следовательно, можно сделать вывод, что замкнутая ИСАУ устойчива.
Найдем предельный коэффициент усиления из уравнения:

По корням характеристического уравнения


Корни лежат внутри единичной окружности, значит, система устойчива.
Найдем предельный коэффициент усиления из уравнения:

Получаем:

Построить переходный процесс для замкнутой САУ (относительно выходного сигнала y(t)).
Найдем передаточную функцию замкнутой ИСАУ относительно выходного сигнала.



Перейдем от изображения к оригиналу:


График переходного процесса, построенный на основе соотношения выше:
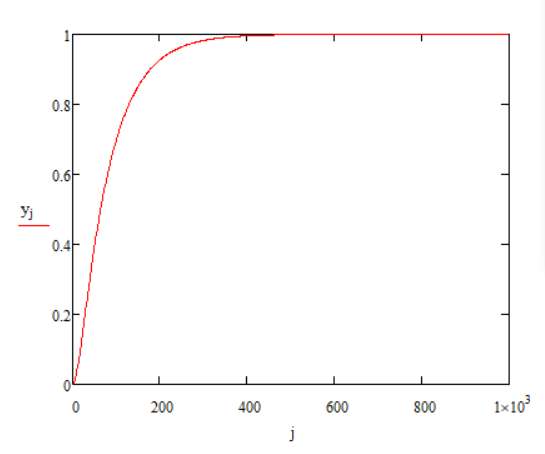
Рис 5. Переходный процесс замкнутой САУ.
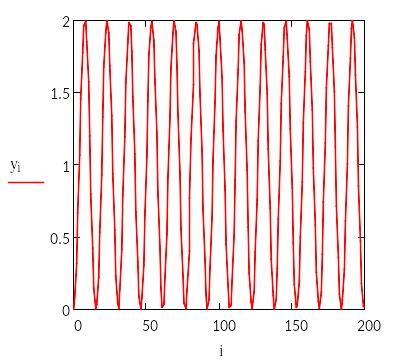
Рис
6. Переходный процесс замкнутой САУ при

Определить статическую и кинетическую ошибки устойчивой замкнутой импульсной САУ (относительно сигнала y(t)).
Формулы для расчета ошибок:
Статическая ошибка:
На
входе системы




Кинетическая ошибка:
На
входе системы



Провести сравнение расчетных результатов с данными, полученными моделированием ИСАУ в Mathlab (Simulink).
Соберем схему (рис 1) в Simulink.
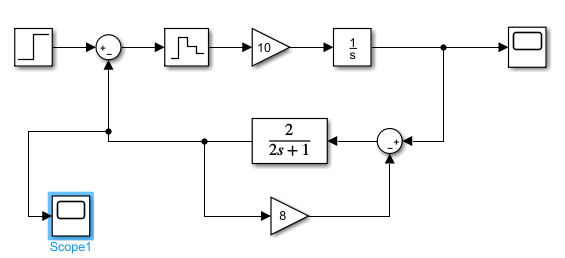
Рис 7. Схема модели ИСАУ.
Выведем показания scope, чтобы проверить переходный процесс ИСАУ.
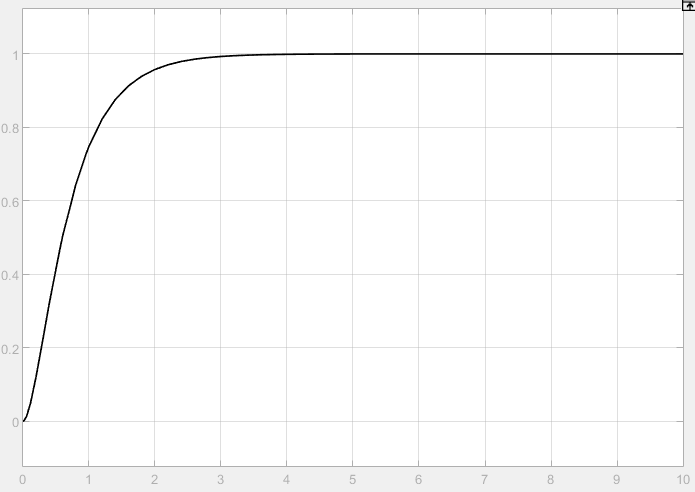
Рис 8. Переходной процесс ИСАУ.
Сравнив рис 5 и рис 8, можно сказать, что сигналы на выходе системы в дискретные моменты времени совпадают, что подтверждает правильность расчетов.
Затем заменим Step на Ramp и добавим в модель display, чтобы проверить кинетическую ошибку.
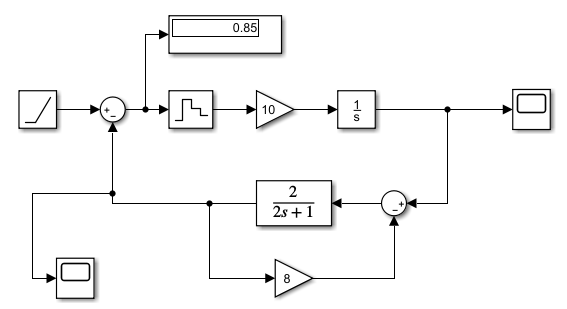
Рис 9. Схема ИСАУ при подаче на ее вход линейно возрастающего сигнала, подтверждающего правильность найденной кинетической ошибки.